Author Archive

Israel’s Beresheet lunar lander imagery taken before crash landing on April 11.
Credit: SpaceIL and Israel Aerospace Industries (IAI)
Last April, the Lunar Library, produced by the nonprofit charity, the Arch Mission Foundation, crash-landed on the Moon within the Israeli Beresheet Moon lander.
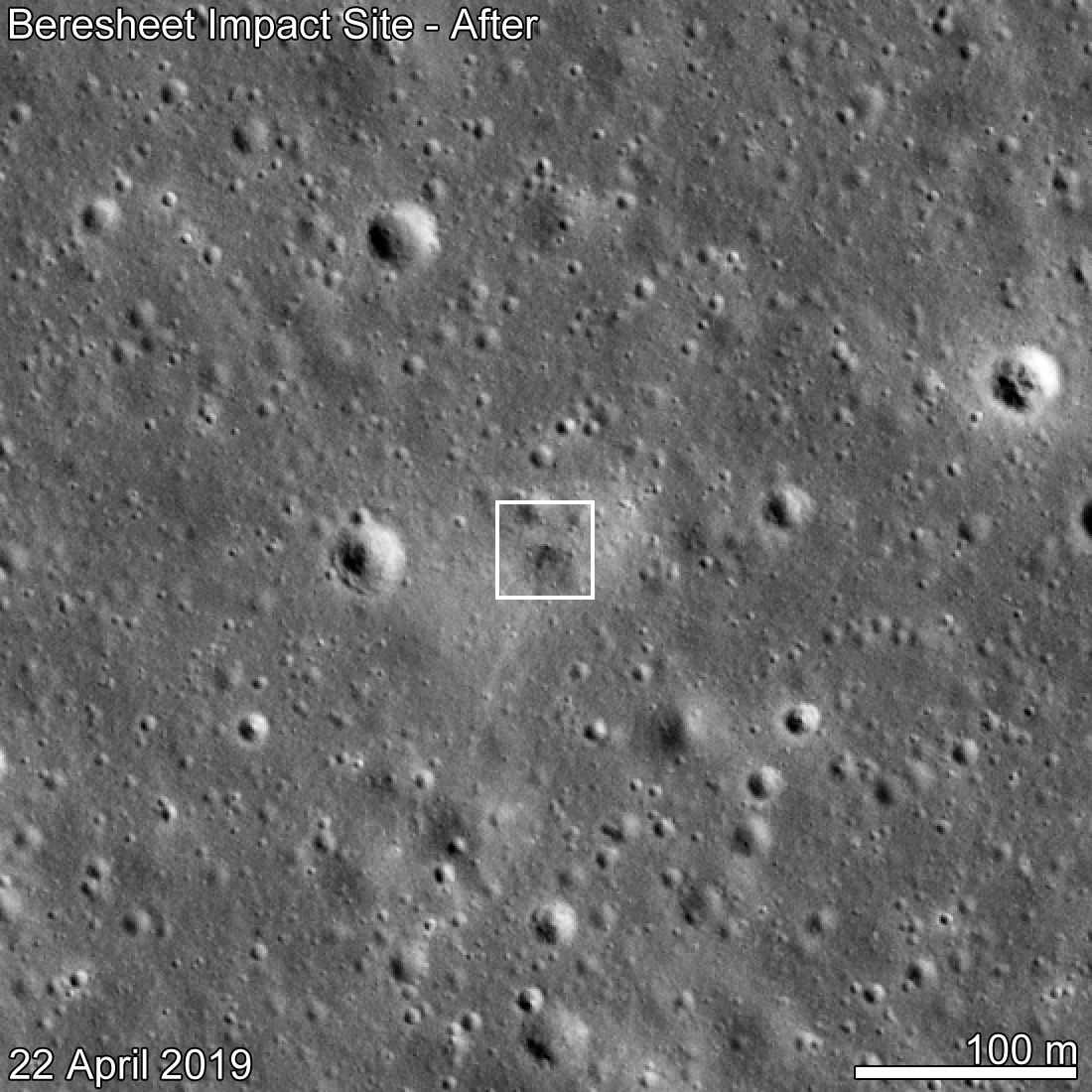
Beresheet impact site.
Credit: NASA/GSFC/Arizona State University
Even though the attempted spacecraft landing failed, some 60,000 images and pages etched into nickel films surely survived intact and are now on the surface of the Moon – much to the exasperation of planetary protection experts.

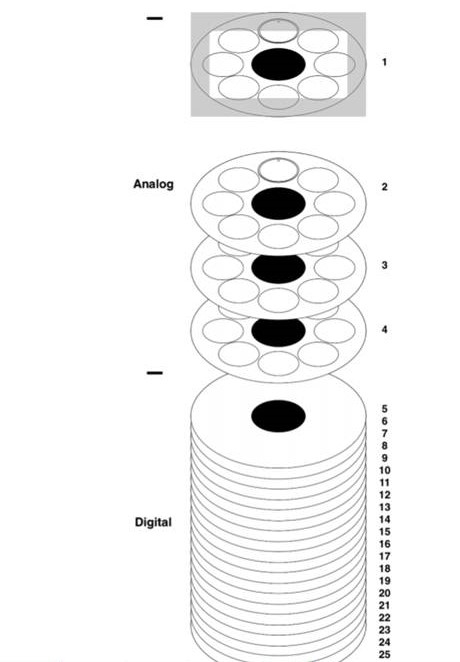
Lunar Library
Credit: Arch Mission Foundation
Library of life
The Arch Disc was 120 millimeters in diameter, consisting of 25 layers of Nanofiche. It weighed just 100 grams and was one millimeter in thickness once assembled – about the size and weight and thickness of a DVD. Although quite small, this artifact contained approximately 30 million pages of knowledge, making it one of the most information-dense objects humanity has ever made.
The Lunar Library contained a 30-million page backup of planet Earth, including the Wikipedia, and many other data sets, reports the Arch Mission Foundation.
Packing and stacking of Lunar Library.
Credit: Arch Mission Foundation
Later it was revealed that a set of secret “vaults” in the Lunar Library are said to have included the first library of life and DNA beyond Earth, including tardigrades, DNA of 25 humans, relics from sacred sites around the world, as well as David Copperfield’s magic secrets.
The Lunar Library’s tardigrades (thousands of dehydrated tardigrades in the “tun” state), were encapsulated in epoxy resin inside the inner seams of the 25 layers of the Lunar Library, and on the sticky side of a small piece of Kapton tape.
Tardigrades, also known as the water bear, are microscopic and are tough as nails – able to survive in ultra-extreme conditions, including space.
Bioload
More recently, as one of the general/overarching findings and recommendations of the NASA Planetary Protection Independent Review Board (PPIRB), the SpaceIL Beresheet lunar lander that carried tardigrades and other biological samples came under scrutiny.
“It is impractical for launch providers or satellite hosts to definitively determine the biological content of every payload. Biological materials intentionally added by a bad actor are especially challenging for launch providers to monitor or report, as they can be further obscured by falsified verification or inaccurate documentation,” the report explains.

A scanning electron micrograph of an adult tardigrade (Hypsibius dujardini). Credit: Willow Gabriel, Goldstein lab, University of North Carolina at Chapel Hill
“The recent experience in which a launch customer placed tardigrades and other biological samples on the SpaceIL Beresheet lunar lander is illustrative. By the Moon’s Category II PP designation, it is likely that a payload license would have been readily granted had the bioload been self-reported; however, the lack of such reporting created new issues relating to launch licensing,” the report to NASA adds.
As a supporting recommendation, the report notes that breaches of planetary protection reporting or other requirements should be handled via sanctions that hold the root perpetrator accountable, rather than increasing the verification and regulatory burden on all actors.
Wanted: more accountability
It’s my understanding that that payload of tardigrades was not disclosed to the launch provider and was not a part of the disclosure to receive a launch permit from the FAA [Federal Aviation Administration],” explained Alan Stern, a space scientist and chair of the study. “So we would like to see more accountability going forward for just that kind of reason,” he said.
“This is a case where the payload provider — and I don’t know, so I’m uncertain whether that was a late add after the documentation, or if it didn’t get into documentation for other reasons — but we would like to see accountability…not at the feet of the launch provider, but at the payload providers who are ultimately putting things onboard to go to these different destinations,” Stern explained in a NASA telecon about the report.

Pre-launch image of the Beresheet lunar lander, developed by the nonprofit SpaceIL and Israel Aerospace Industries (IAI)
Credit: SpaceIL
Openness and transparency
Adding in her view during the telecon, Lisa Pratt, NASA’s Planetary Protection Officer, said:
“When there is a launch from U.S. soil, regardless of who is putting the payload onboard, NASA is consulted by FAA about whether or not there are problems with what’s known about payload,” Pratt said.
In the case of the Israeli spacecraft that carried the tardigrades, “we were not aware that there were biologicals,” Pratt said. There is no prohibition on putting biologicals on the Moon, she added, “and many people are well aware that there was a recent Chinese mission that had a number of seeds and even a potato plant that was sprouted on the Moon.”
Pratt said that “it’s about openness and transparency so that one group doesn’t inadvertently change what other groups can find or discover later. So the problem here is that nobody knew. And the individual who did this was proud of the fact and had a great deal of social media information…about not only were there tardigrades, but there were blood samples and suggested that there might be other things in addition,” Pratt said.
“So again, it’s really about the science and the way internationally we cooperate with one another so that one of us does not inadvertently do something that damages the ability of another nation to make a discovery and that’s a sounding principle in the Outer Space Treaty,” Pratt concluded.

Nova Spivack, founder of the Arch Mission Foundation.
Credit: Nova Spivack
No laws broken
Nova Spivack is founder of the Arch Mission Foundation and CEO of Magical, a science & technology venture studio in Los Angeles.
“The NASA report briefly mentions the risk of truly bad actors in space. Although no laws were broken in this case, nor was there any harm, we agree that the risk of future bad actors deliberately harming a protected location should be prevented,” Spivack told Inside Outer Space.
“The solution is a single planetary protection payload handoff form that should be filed with NASA, upon payload handoff, by any party sending anything to a protected location (which the Moon is not). The challenge is to get that legislated, and to make it internationally binding,” Spivack said.
To read the full final report — NASA Planetary Protection Independent Review Board (PPIRB), Report to NASA/SMD – go to:
https://www.nasa.gov/sites/default/files/atoms/files/planetary_protection_board_report_20191018.pdf
For more information on the Arch Mission Foundation, go to:

A supercomputer simulation by LLNL physicist Mike Owen illustrates how a 1 megaton nuclear detonation could impart enough energy onto the surface of the massive asteroid 101955 Bennu to nudge it off course, if it were to be on an Earthbound trajectory. The black dot is the simulated detonation location, around 100 meters from the surface at the equator. The colors show where X-rays would heat a thin layer of surface material. Blue areas would be heated, but not enough to eject material. All other colored areas would deposit enough energy to eject surface material and alter the asteroid’s velocity and trajectory.
Credit: LLNL
The first-ever, in-depth investigation into how an asteroid would respond to a nuclear deflection attempt has been completed.
The research was published by Acta Astronautica online Oct. 15 and will appear in print in early 2020.
The focus of the investigation was 101955 Bennu, a massive asteroid that has a remote chance of crossing paths with Earth more than a century from now.
It is the second examination of deflection technologies using Bennu as a test case.
Nuclear impulse
The first Bennu case study found that a kinetic impactor – similar to using a spacecraft as a battering ram – would not be effective at deflecting a Bennu-class asteroid. This second case study, however, found that a standoff nuclear impulse would be effective in deflecting Bennu.
An interagency team of researchers led by Lawrence Livermore National Laboratory (LLNL) completed the appraisal. NASA’s Goddard Space Flight Center, Los Alamos National Laboratory and the National Nuclear Security Administration (NNSA) collaborated on the research.

NASA’s Origins, Spectral Interpretation, Resource Identification, Security-Regolith Explorer (OSIRIS-REx) spacecraft.
Credit: NASA/Goddard/University of Arizona
Research highlights
If space rock Bennu sounds familiar, it should – it is now being investigated by NASA’s Origins, Spectral Interpretation, Resource Identification, Security-Regolith Explorer (OSIRIS-REx) spacecraft.
Highlights of the new research:
— Asteroid Bennu can be successfully deflected by extant nuclear devices.
— Kinetic impact, even with large momentum enhancement, is unlikely to deflect Bennu.
— Nuclear deflection efficacy depends upon the x-ray source spectrum.
— Nuclear deflection efficacy is enhanced by near-surface, unbound volatiles.
Final option
“The nuclear option would be the key to deflecting large asteroids,” said Dave Dearborn, an LLNL physicist and lead author on the paper. “It also offers flexibility that impactors don’t. For instance, the amount of energy deposited into an asteroid with a nuclear device can be tuned by adjusting how far it is from the asteroid when detonated,” he said in a LLNL press statement.
As explained in the research paper, though rare, asteroid impacts are inevitable, and with the current state of technology, kinetic impactors are the preferred but not the complete solution. If the time to impact is short, or the threatening body too large, nuclear deflection serves as a final option.
To view the new paper – “Options and uncertainties in planetary defense: Impulse-dependent response and the physical properties of asteroids” – go to:
https://www.sciencedirect.com/science/article/abs/pii/S0094576519313323
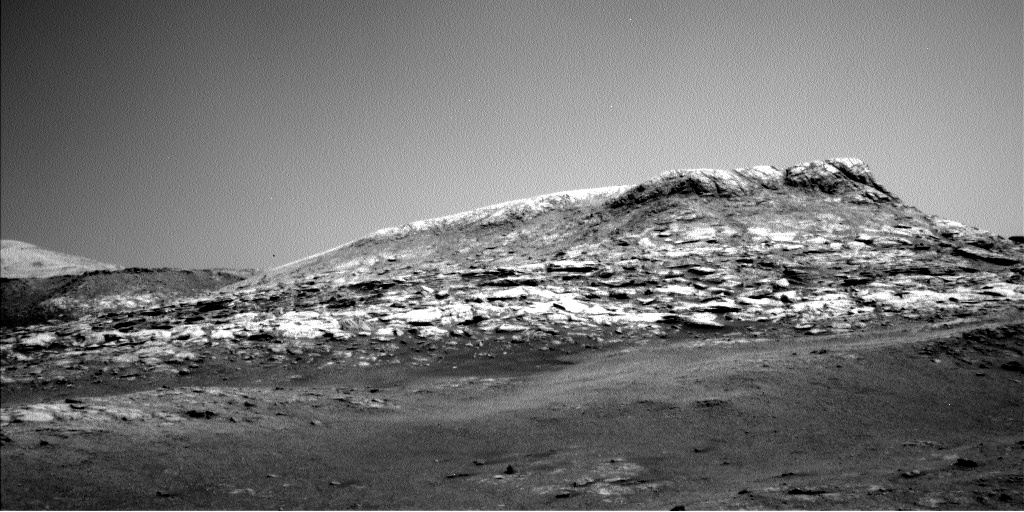
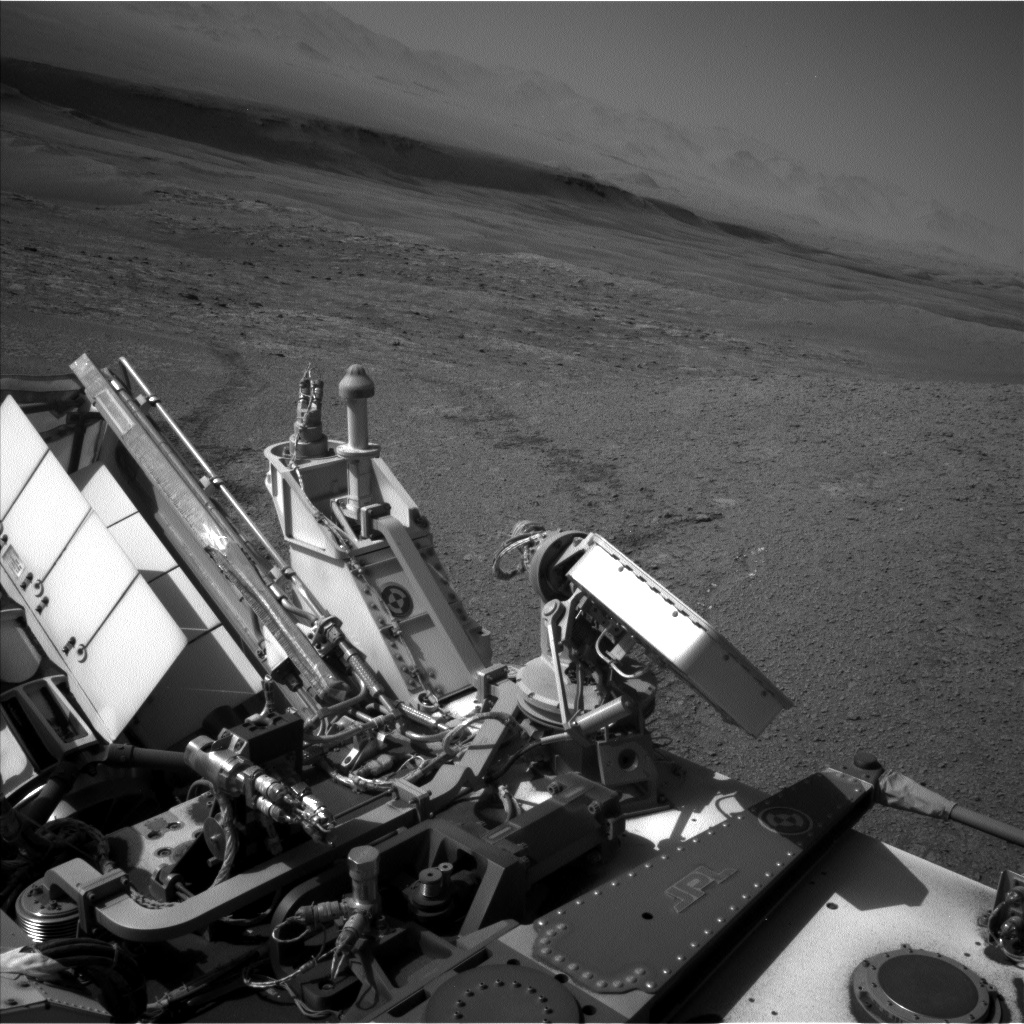
“Central Butte” is visible in this image taken by Curiosity’s Left Navigation Camera B Sol 2565 October 24, 2019
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now carrying out Sol 2567 duties.
Kristen Bennett, a planetary geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona, reports that Curiosity is in an incredible area, with interesting rocks in the workspace and towering buttes ahead of the Mars machinery.
“There are some color variations within the workspace, with some gray blocks right in front of the rover,” Bennett notes. There are three contact science targets in the weekend plan, two are a combination of Alpha Particle X-Ray Spectrometer (APXS) and Mars Hand Lens Imager (MAHLI) observations, and one is a MAHLI-only observation.
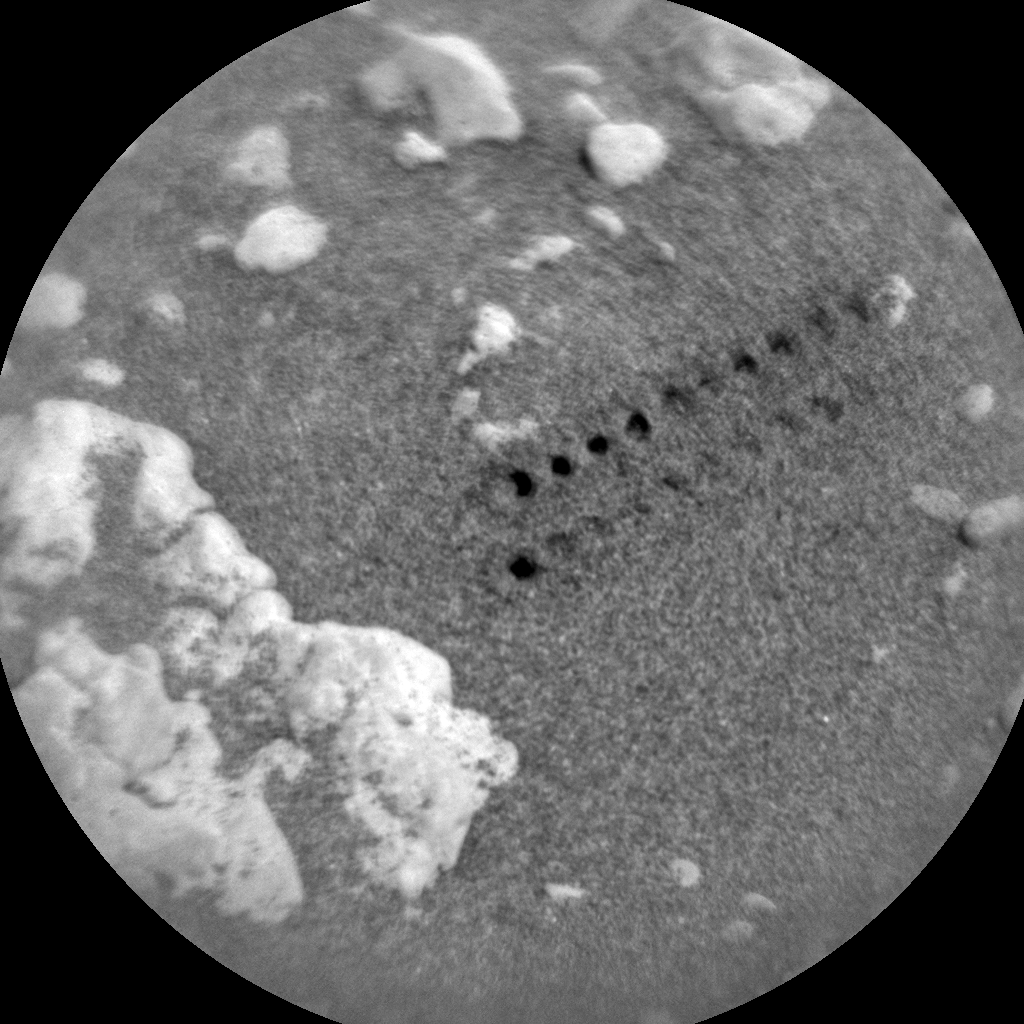
Curiosity Chemistry & Camera (ChemCam) Remote Micro Imager (RMI) photo taken on Sol 2566, October 25, 2019.
Credit: NASA/JPL-Caltech/LANL
Clear the dust
“South Ronaldsay” is on a flat bedrock target, and the Dust Removal Tool will be used to clear the dust before the MAHLI and APXS observations, Bennett explains.
“White Craig” is a MAHLI and APXS target on a different block to characterize any potential variations in this area.
Curiosity Mast Camera (Mastcam) Left image taken on Sol 2565, October 24, 2019.
Credit: NASA/JPL-Caltech/MSSS
Finally, “The Doups” is a MAHLI-only target in which we will look obliquely at the side of a block to investigate the sedimentary structures in this area.
Remote science
The weekend plan is also chock-full of remote science.
The robot’s Chemistry and Camera (ChemCam) will target South Ronaldsay, so scientists can compare these results to the contact science observations.

Curiosity Left Navigation Camera B photo acquired on Sol 2565, October 24, 2019.
Credit: NASA/JPL-Caltech
ChemCam will also target “Ruvaal,” which is on another part of the bedrock in the workspace, to test for variations. Mastcam will take documentation images of both of these ChemCam targets.

Curiosity Left Navigation Camera B image acquired on Sol 2566, October 25, 2019.
Credit: NASA/JPL-Caltech
Butte and tower country
Additionally, there are two large Mastcam mosaics in the plan.
“Curiosity is now driving through butte and tower country, so we planned mosaics to cover two of the nearby buttes,” Bennett reports. “One mosaic is of ‘Central Butte,’ which we will continue to drive around. Another is of “Rapness,” which is off to the east of the rover.”
After all these observations, Curiosity will drive towards Central Butte, Bennett adds, to start investigating the laminations that outcrop there. To add even more science observations to the plan, Curiosity will also take mid-drive imaging with Mastcam in order to get stereo information of the butte.
Curiosity Chemistry & Camera (ChemCam) RMI image taken on Sol 2565, October 24, 2019.
Credit: NASA/JPL-Caltech/LANL
“Usually we get stereo by taking a Mastcam image of a target with both the right and left Mastcam cameras. But we can also obtain stereo by taking a picture, physically moving the rover a little bit, and then taking another picture,” Bennett concludes. “This butte is showing off some amazing laminations, so we are doing this long baseline stereo observation to better characterize this area.”
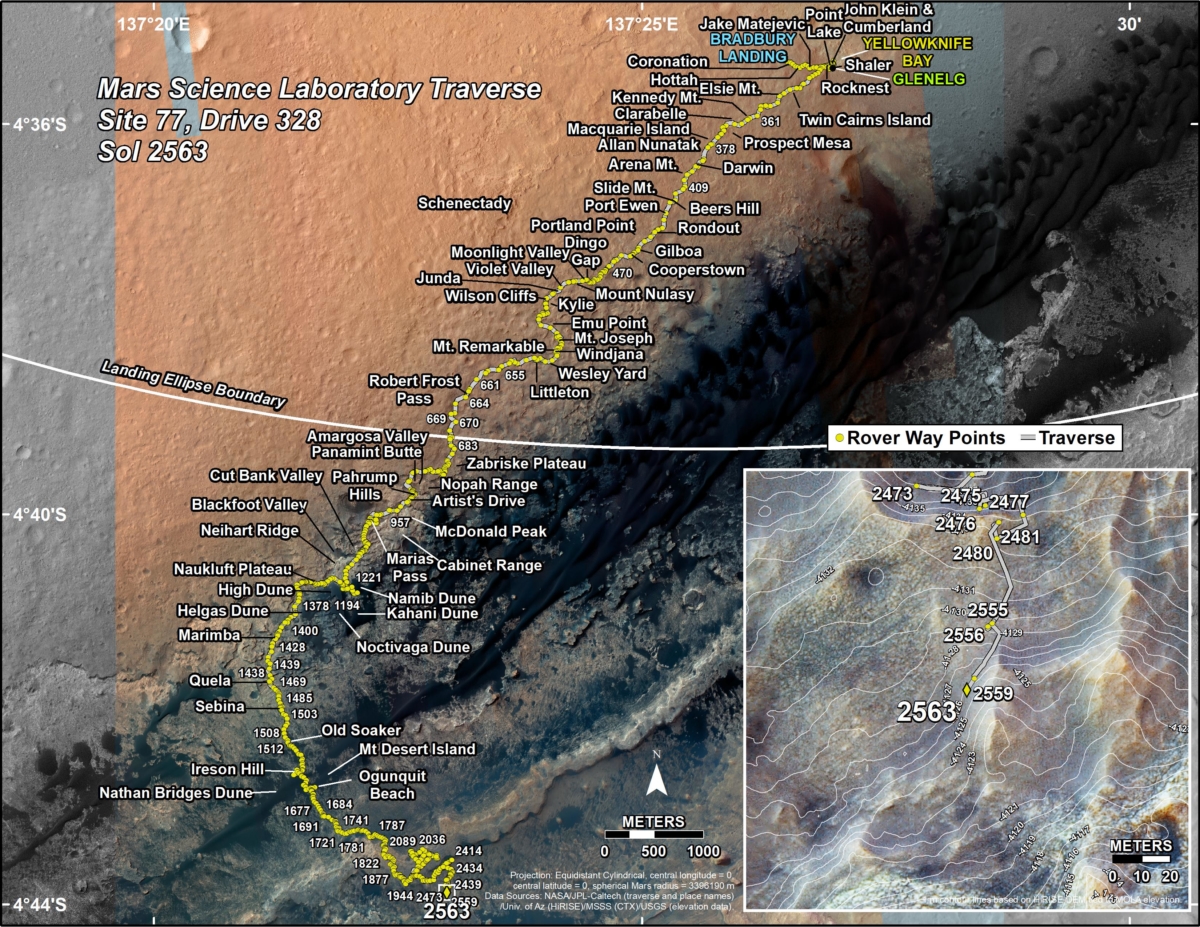
New road map
A new road map shows the route driven by NASA’s Mars rover Curiosity through the 2563 Martian day, or sol, of the rover’s mission on Mars (October 22, 2019).
Numbering of the dots along the line indicate the sol number of each drive. North is up. From Sol 2559 to Sol 2563, Curiosity had driven a straight line distance of about 15.35 feet (4.68 meters).
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 13.15 miles (21.17 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Curiosity Right Navigation Camera B image acquired on Sol 2566, October 25, 2019.
Credit: NASA/JPL-Caltech

The Red Planet as seen by Europe’s Mars Express.
Credit: ESA/D. O’Donnell – CC BY-SA IGO
There is growing discussion, debate, and frustration regarding future exploration of Mars and how best to hunt for past, even present life on the Red Planet.

Credit: Bryan Versteeg
A wide range of thorny issues now require attention. Some of these have been brought to the fore by just round the corner private sector missions, cleanliness demands for Mars probes, plans to robotically hurl Martian samples back to Earth, and the outlook of eventually planting human footprints on that faraway world.
One facet of the deliberation is what constitutes a “Special Region” on Mars.
For more information, please go to my new Scientific American story:
Reduce Red Tape for the Red Planet, Report Says – Regulations governing the responsible exploration of Mars and other worlds require regular, frequent updates, according to a new NASA review
https://www.scientificamerican.com/article/reduce-red-tape-for-the-red-planet-report-says/

Credit: NASA/JPL-Caltech
“We have made important progress in our attempts to get the mole digging again…in fact, we got it digging again!”
That’s the word from Tilman Spohn of the German Aerospace Center’s (DLR) Institute of Planetary Research in Berlin. He’s the experiment leader on the Heat Flow and Physical Properties Package (HP3), the self-hammering “mole” designed to dig down as much as 16 feet (5 meters) and take Mars’ temperature.
The HP3 has been trouble-plagued, deployed from the NASA InSight Mars lander.

Components of the HP3 heat flow probe. Top left: the radiometer (RAD), which is used to measure the radiation temperature (roughly equivalent to the ground temperature) of the surface. Right: the casing with the mole penetrometer, the temperature measuring cable (TEM-P) and the data cable (ET) connected to the lander. In addition, the casing contains an optical length meter for determining the length of the temperature measuring cable that has been pulled from the casing. The mole contains the TEM-A active thermal conductivity sensor and the STATIL tiltmeter. Bottom left: the electronic control unit, known as the back end electronics (BEE), which remains on the lander and is connected to the probe via the ET.
Credit: DLR
Digging slowly but steadily
“You may recall that we have pinned the mole with the [lander’s robotic] scoop which resulted in the mole digging slowly but steadily. Four carefully planned sessions have been executed on sols 308, 311, 315 and 318, with 20, 100, 100, and 150 strokes, respectively,” Spohn reports.
At the end of sol 318, mole scientists had exhausted their capability of pinning because the mole had dug so deep that it would risk the tether if the arm under tension would move uncontrolled to the left as the mole dug below it.
“We therefore moved the arm slightly to the right – about 1 centimeter – away from the mole thereby releasing the pin,” Spohn adds. The arm was commanded to press onto the surface.

InSight mole specialists and technicians at Jet Propulsion Laboratory have developed and have implemented strategies to get the mole moving again. Credit: NASA/JPL-Caltech.
Breakthrough
“With its force of 50 Newtons, we estimated that the load at the mole at shallow depth would still be more than twice the load provided by the overburden. Still, as the friction on the mole sleeve would be significantly less than from pinning, it was not obvious that the mole would continue digging,” Spohn explains.
Mole scientists and technicians commanded 50 strokes to be executed on sol 322 because they would not have proof that the scoop would indeed press on the surface as we started hammering. The mole was clearly seen to dig.

InSight Mars lander.
Credit: NASA/JPL-Caltech
“To me this is a breakthrough! It tells me that indeed insufficient friction was the root cause of the problem,” Spohn points out. “I am now confident that with the next round of hammer strokes – 500 are planned for sol 325 – we get the mole fully buried,” he notes.
The news from the site about this prospect will be available on Saturday evening Central European Time.


NASA’s Lunar Reconnaissance Orbiter (LRO).
Credit: NASA/Goddard Science Visualization Studio (SVS)
NASA’s Lunar Reconnaissance Orbiter (LRO) has once again imaged the area where India’s Chandrayaan-2 Vikram Moon lander failed to successfully touch down.
LRO imaged the targeted landing site on October 14 but did not observe any evidence of the lander.

Pre-launch photo shows India’s Pragyan rover mounted on the ramp projecting from out of the sides of Vikram lunar lander.
Credit: ISRO
Change detection technique
The LRO camera team carefully examined the images and employed the change detection technique (using a ratio of an image from prior to the landing attempt to the one acquired on October 14).
That technique is used for finding new meteorite impacts on the Moon that also helped locate Israel’s Beresheet failed lunar lander earlier this year.
“It is possible that Vikram is located in a shadow or outside of the search area. Because of the low latitude, approximately 70 degrees south, the area is never completely free of shadows,” explains a NASA statement.

Dust up on the Moon. Apollo 17 commander prepares to doff lunar dust-covered space suit.
Credit: NASA
Think of it as a flash back message from the Apollo moonwalkers. The Moon is a Disneyland of dust.
Between 1969 and the end of 1972, a dozen astronauts kicked up the powdery regolith, the topside dirt of the Moon.
Apollo aroma
Apollo expedition members could not escape tracking lunar material inside their Moon lander homes. After doffing their helmets and gloves, moonwalkers could feel the abrasive nature of the dust, as well as smell and even taste the Moon. And that gave rise to the “Apollo aroma”- astronaut recollections of the odor of the Moon.

A vial of Apollo 11 Moon dust from a lunar sample collected in 1969.
Credit: Marilee Bailey/Lawrence Berkeley National Laboratory
Turns out, it has a distinctive odiferous smell.
Dangers to address
Earth’s Moon will be the “go-to” place as the century progresses. But there will also be political, economic and financial reasons to explore and colonize lunar territory, in particular, to extract water from the Moon’s surface and to mine for precious rare-earth metals as terrestrial resources dwindle.

Though there will be opportunities for those willing to make use of those resources, whether as nations, as individuals, as private companies or as a combination of these, there will be dangers to address.
One such danger to astronauts will be from exposure to lunar dust.
For more information, please read my new Space.com story:
Moon Dust Could Be a Problem for Future Lunar Explorers
Lunar dust is abrasive and gets into everything.
https://www.space.com/moon-dust-problem-lunar-exploration.html

Curiosity Left Navigation Camera B image taken on Sol 2559, October 18, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2560 duties.

Curiosity Left Navigation Camera B image taken on Sol 2559, October 18, 2019.
Credit: NASA/JPL-Caltech
Reports Susanne Schwenzer, a planetary geologist at The Open University, Milton Keynes, U.K., due to no reception of “decisional data” from NASA’s Mars Reconnaissance Orbiter, Mars rover teams decided to make the best use of the time and energy available using the untargeted investigations available to them.

Curiosity Left Navigation Camera B image taken on Sol 2559, October 18, 2019.
Credit: NASA/JPL-Caltech
The rover’s Mastcam has been busy with a 360 panorama, “which will give context to all our past and future investigations in the area,” Schwenzer explains.
“In addition to the daytime ground-based observation, Mastcam wakes up in the dark to do an astronomical investigation of Phobos, followed – in daytime – by some calibration activities.”
Curiosity Left Navigation Camera B image acquired on Sol 2559, October 18, 2019.
Credit: NASA/JPL-Caltech
Curiosity Left Navigation Camera B image taken on Sol 2559, October 18, 2019.
Credit: NASA/JPL-Caltech
Busy weekend
Schwenzer adds that it’s not only Mastcam that will be busy over the weekend.
Curiosity’s Chemistry and Camera (ChemCam) has two observations to investigate three targets.
ChemCam can use Autonomous Exploration for Gathering Increased Science (AEGIS), an image processing routine to find its own targets.
“It will be looking for one target in the workspace, and two to the side of the rover,” Schwenzer concludes. “We are now all looking forward to data from 5 sols of Curiosity activities – stay tuned!”

Houston: Space City USA by Ray Viator; Texas A&M University Press, College Station, Texas, 2019; hardcover: 224 pp. 222 color, 6 b&w photos, $37.00.
Given the development of new spaceports around the world, this volume celebrates Houston, Texas as “mission control” for America’s on-going spaceflight program.
Recall those words from Apollo 11’s Neil Armstrong on July 20, 1969: “Houston, Tranquility Base here. The Eagle has landed.”
This visually stunning work by Viator, a Houston author and photographer, captures the spirit of Houston’s ties to America’s space program. Beyond the splendid visuals, the book is loaded with gems of knowledge, such as why Houston was the selected site for the $200 million “manned spaceflight laboratory.”
There are a number of refreshing surprises throughout this volume, including an appendix that honors and remembers the human cost in pioneering the space frontier.

Author Ray Viator
Photo by Cynthia Viator
“The book also celebrates the impact of the space program on our city and region,” Viator writes. “The space program raised Houston’s visibility both nationally and around the world.” As the author notes, about 20 percent of the nearly one million annual visitors to Space Center Houston come from other nations.
“This book is also a celebration of the whimsical and humorous, the fancy and the fantastical that surrounds us every day, if we just take the time to look,” Viator adds.
The reader will find a unique blend of imagery and text within the book’s pages, anchoring Houston as mission control over the past decades to today…and the future.
All proceeds from sales of “Houston: Space City USA” benefit Houston Public Media’s programming and news coverage of space, science and technology.
For more information on this book, go to:
https://www.tamupress.com/book/9781623497729/houston-space-city-usa/
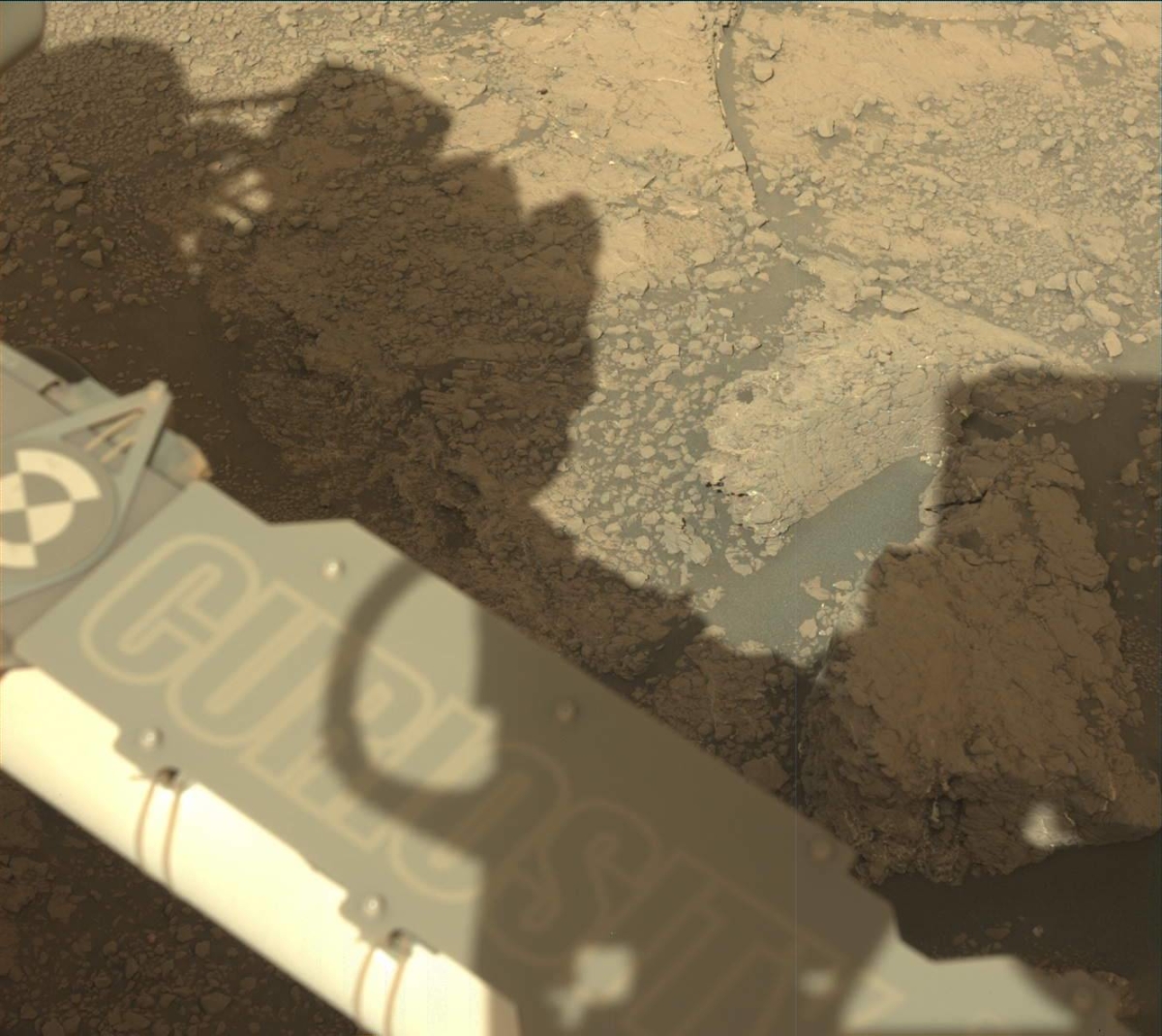
Curiosity Left Navigation Camera Left B photo acquired on Sol 2558, October 17, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now carrying out Sol 2559 duties.
“Our drive away from our long-time home at the “Glen Etive” drilling site was successful, and set us up nicely at our next exploration site, one of the “Culbin Sands” megaripples,” reports Michelle Minitti, a planetary geologist at Framework in Silver Spring, Maryland.

Curiosity Front Hazard Avoidance Camera Right B image taken on Sol 2558, October 17, 2019.
Scuff the ripple
A recent primary goal was for Curiosity to “scuff” the ripple, intentionally driving into the ripple with its front right wheel to churn up and expose its interior.

Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2558, October 17, 2019.
Credit: NASA/JPL-Caltech/MSSS
“By studying the composition and grain size of the ripple interior and exterior, the team hopes to determine the origin and history of these megaripple features,” Minitti explains. “Before exposing the interior of the ripple with the scuff, the team acquired data from the ripple exterior, specifically the ripple crest.”

Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2558, October 17, 2019.
Credit: NASA/JPL-Caltech/MSSS
Laser shots
The ten shot Chemistry and Camera (ChemCam) raster across the ripple crest, on the target “Seilebost Beach,” will provide insight into the chemistry and size distribution of the grains on top of the ripple, Minitti adds.
After shooting Seilebost Beach, the rover was set to back up just over one meter and then acquire Mastcam and Navcam mosaics encompassing the whole of the ripple.
“These will give us one last pristine look at the ripple in its entirety before the wheel digs in,” Minitti notes. “The rover will then scuff the ripple and then position itself so that the scuff is within reach of the arm and mast instruments for several subsequent days of science observations focused on the scuff.”

Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2558, October 17, 2019.
Credit: NASA/JPL-Caltech/MSSS
Shadows on Mt. Sharp
Once the robot is parked in place, the Mars Descent Imager (MARDI) is scheduled to acquire an image of the ripple surface under the rover and the Dynamic Albedo of Neutrons (DAN) is slated to ping the new ground beneath the rover with an active measurement.
“The sky above us is always changing,” Minitti concludes, “so the rover acquired Navcam movies to look for clouds in the sky and any shadows they cast on Mt. Sharp, as well as an atmospheric chemistry analysis with its Alpha Particle X-Ray Spectrometer (APXS) along with taking regular Rover Environmental Monitoring Station (REMS) and Radiation Assessment Detector (RAD) measurements.

