Author Archive
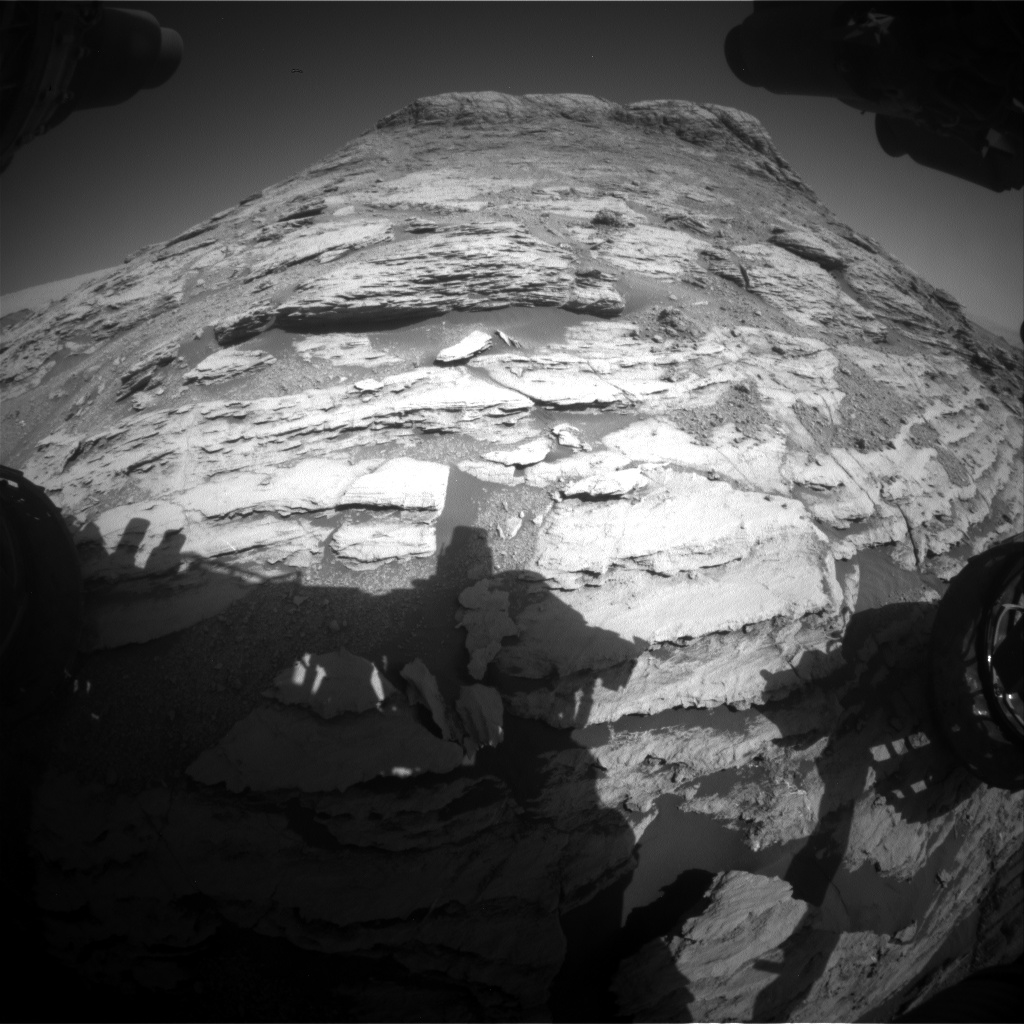
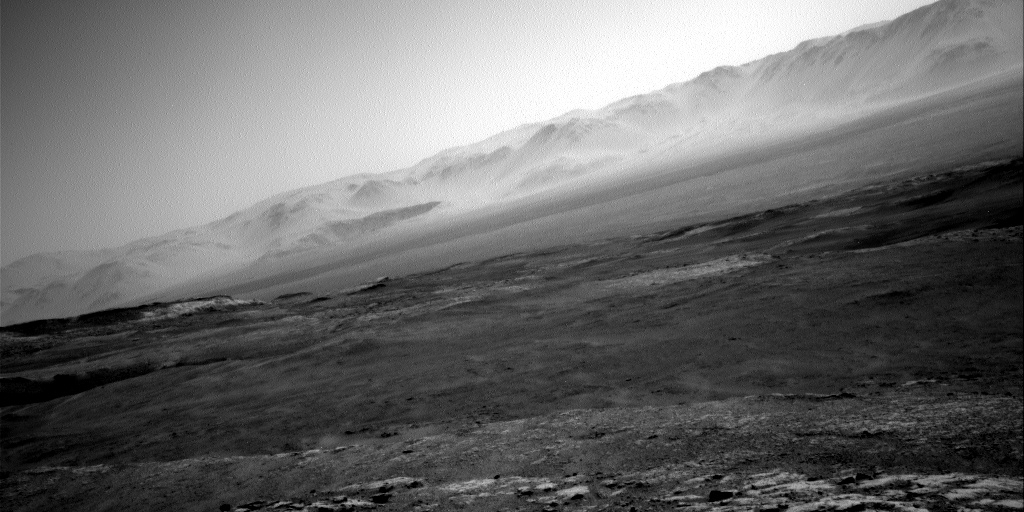
Curiosity Front Hazard Avoidance Camera Left B image acquired on Sol 2584, November 13, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2585 tasks.
A newly released map shows the route driven by NASA’s Mars rover Curiosity through the 2582 Martian day, or sol, of the rover’s mission on Mars (November 11, 2019).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
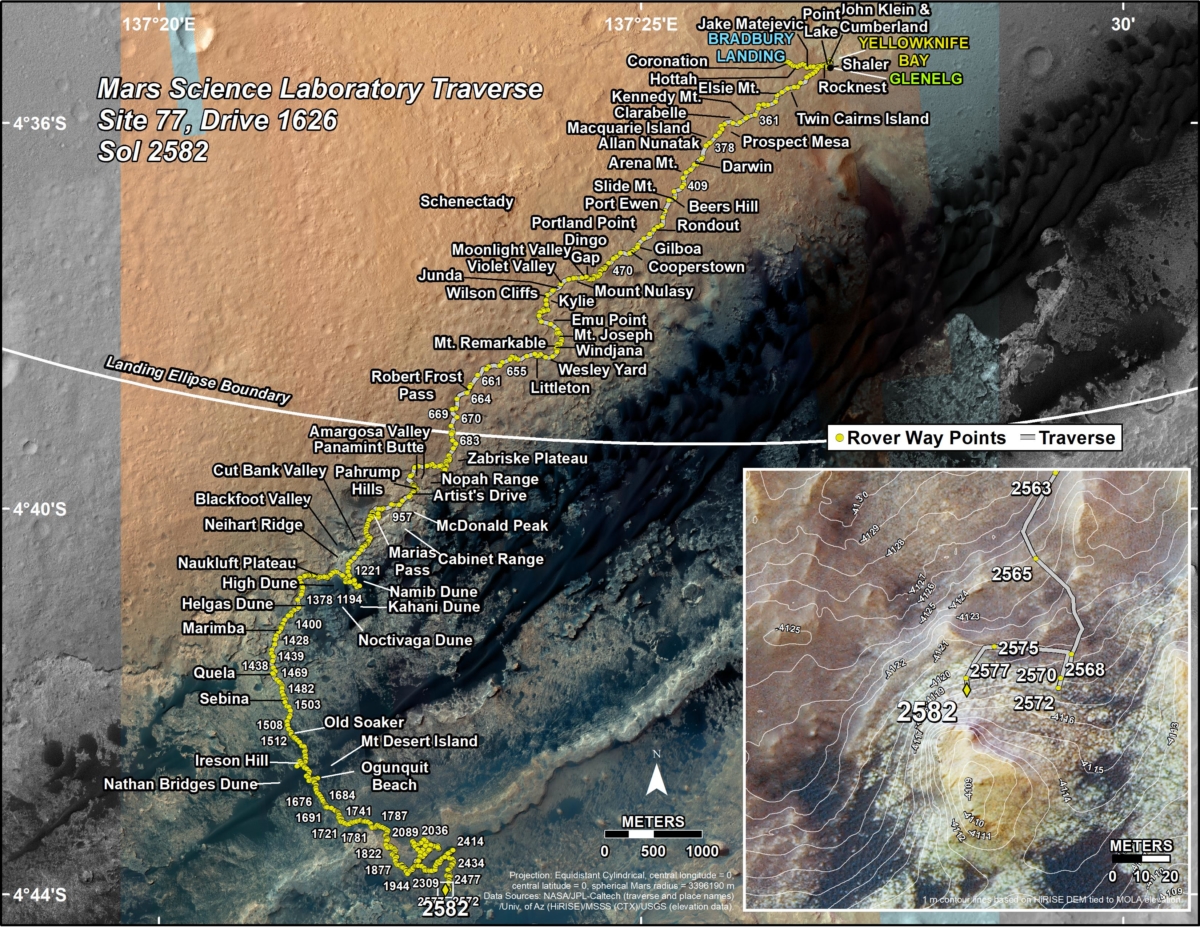
Credit: NASA/JPL-Caltech/Univ. of Arizona
From Sol 2577 to Sol 2582, Curiosity had driven a straight line distance of about 13.02 feet (3.97 meters), bringing the rover’s total odometry for the mission to 13.24 miles (21.31 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
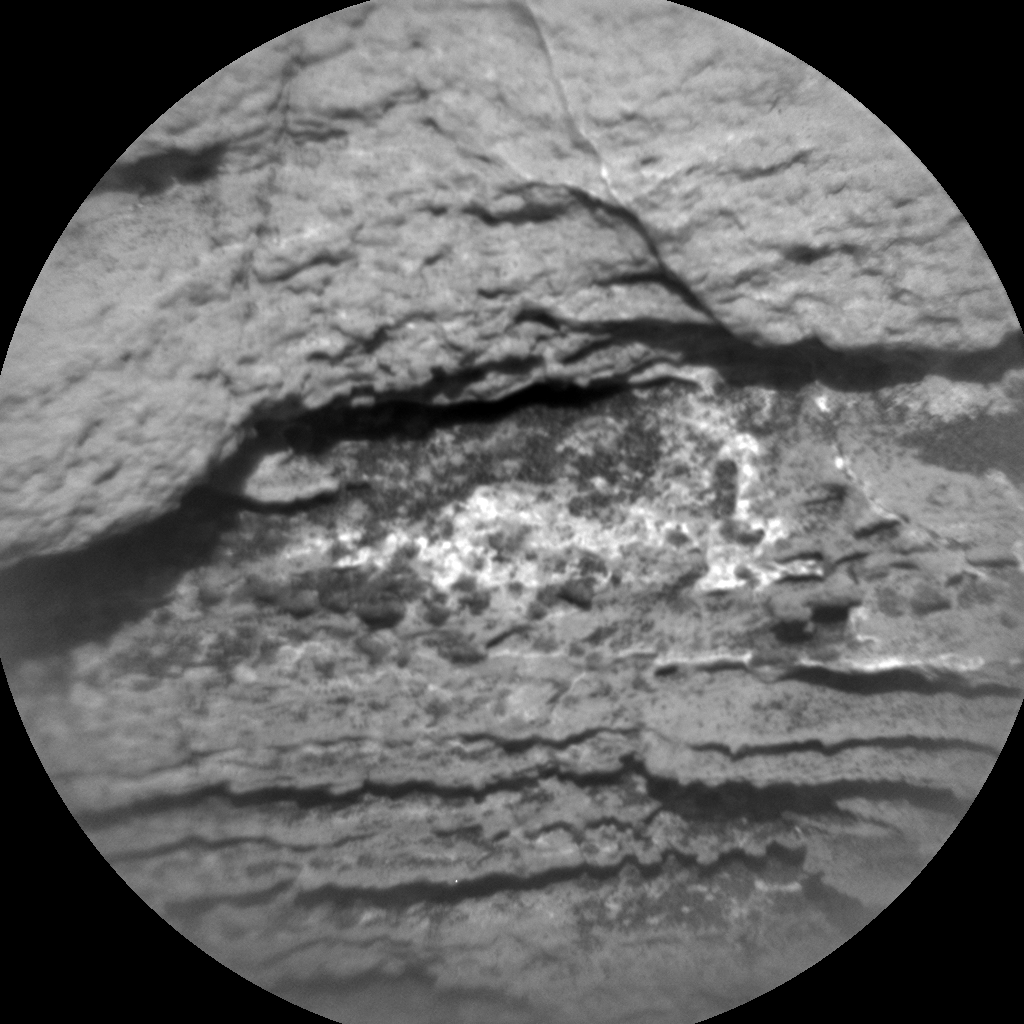
Curiosity Chemistry & Camera (ChemCam) RMI photo taken on Sol 2585, November 14, 2019.
Credit: NASA/JPL-Caltech/LANL

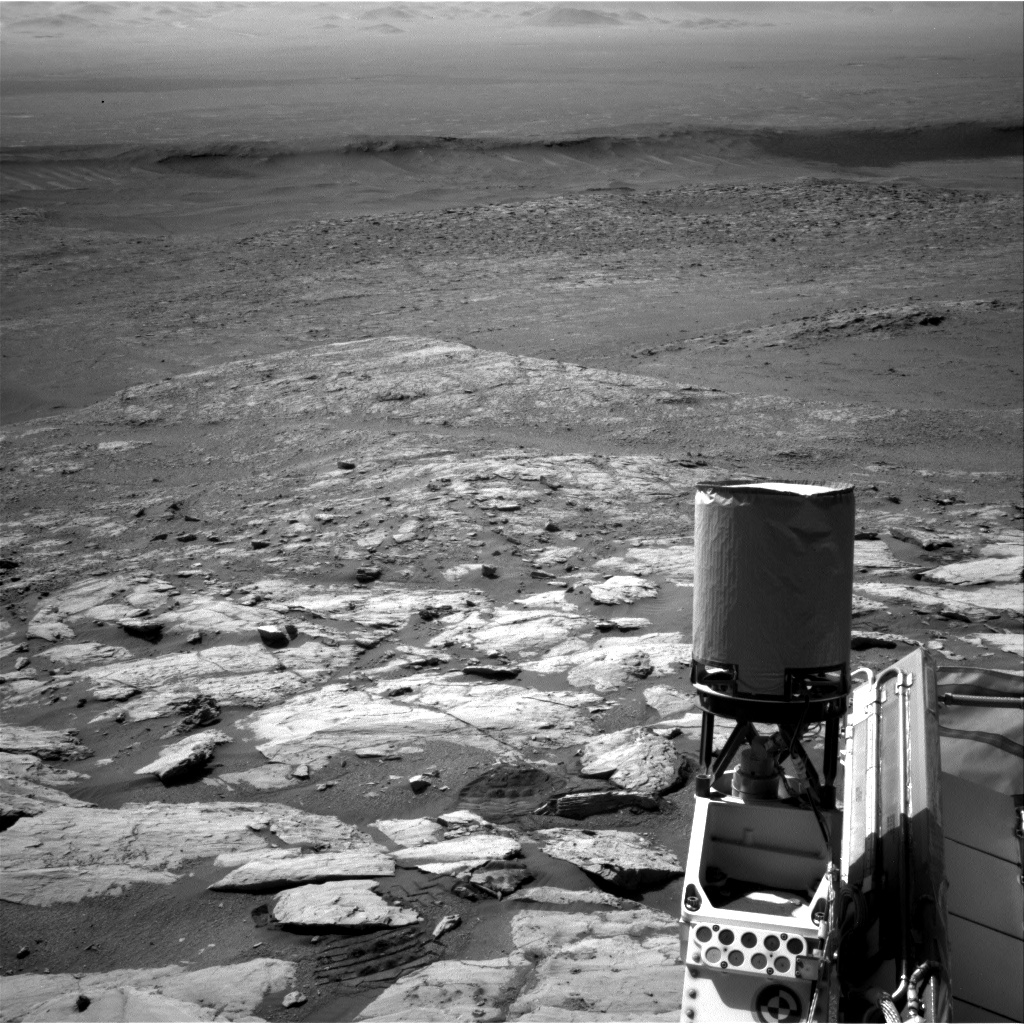
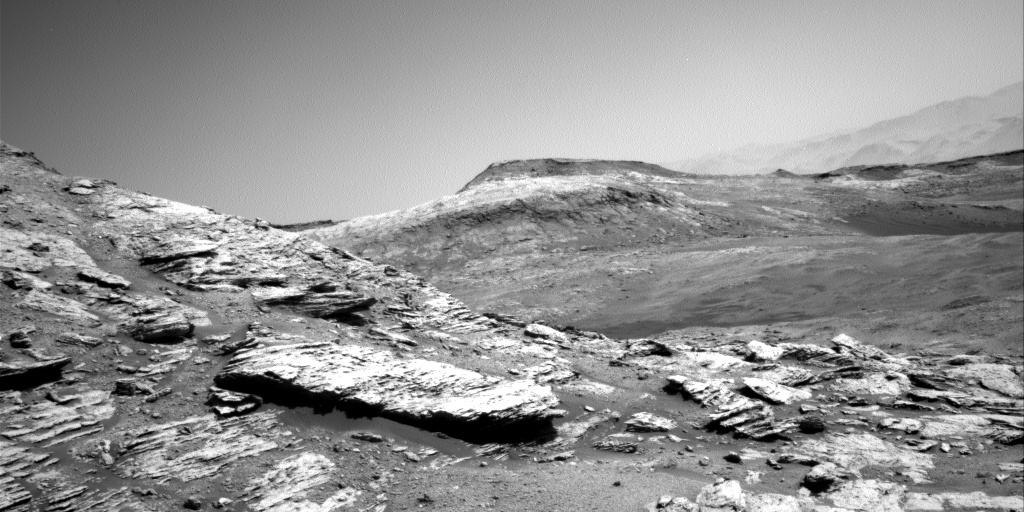
Curiosity Right Navigation Camera Right B image acquired on Sol 2584, November 13, 2019.
Credit: NASA/JPL-Caltech

Credit: NASA
Worth a read: A new NASA Office of Inspector General (OIG) 2019 Report on NASA’s Top Management and Performance Challenges.
Among items discussed:
Landing Humans on the Moon by 2024
Sustaining a Human Presence in Low Earth Orbit
Go to:
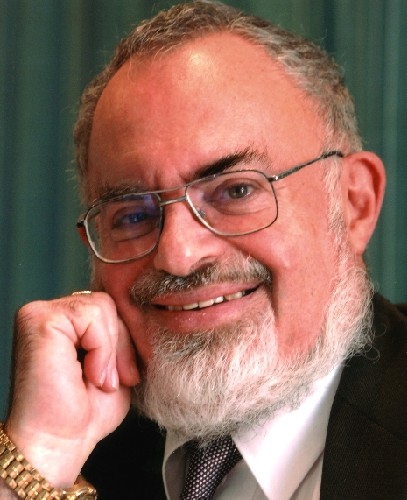
Leading UFO researcher, Stanton Friedman.
Credit: Stanton Friedman website
If you are sky-eyed and hooked by “UFO-ology,” a leading spokesperson on the topic was nuclear physicist and lecturer Stanton T. Friedman.
As a scientist that had a serious interest in flying saucers since 1958, he will be missed by researchers given his untimely death in May of this year at the age of 84.
Extensive work
I met Friedman several times over the years, and found him captivating and a believable UFO investigator. His legacy lives on…thanks to the Provincial Archives of New Brunswick, Canada.
Stanton Friedman donated his invaluable research papers to the archive – a donation that filled five cargo vans, explains Joanna Aiton Kerr of the archives.

The archival room being used to process the Stanton Friedman material acquired from his home – three rooms worth, and what is shown is about 1/6th of his research collection.
Credit: Joanna Aiton Kerr/Provincial Archives of New Brunswick, Canada
“Due to the volume of the material and the need to do extensive work to make it available to researchers it would probably take about 10 years with the resources we currently have available to focus on it,” Kerr told Inside Outer Space.
“In a perfect world, we would have two archivists working on it and nothing else full time,” Kerr said, [and] if that happened it would still take two to three years – there is that much of it.”
Photo of newspaper clipping on the door to one of the rooms in Friedman’s home where he kept some of his UFO research material.
Courtesy: Joanna Aiton Kerr/Provincial Archives of New Brunswick, Canada
Archival pressure
Kerr said that the records are so interesting, and the interest from the public is such that the archive feels the pressure and need to make sure that they do everything as quickly as they can…”but it also needs to be done right!”
Records are available to researchers as they are processed, Kerr added. “However we are not digitizing – this would be a mammoth task and frankly pointless until the actual paper/photographs, etc, are physically organized and listed. Otherwise it would just be a big digital mess.”
The challenge
Friedman had posted in December 1997 that he had reached four major conclusions, under the title of “The UFO Challenge”:
— The evidence is overwhelming that Planet Earth is being visited by intelligently controlled extraterrestrial spacecraft. In other words, SOME UFOs are alien spacecraft. Most are not.
— The subject of flying saucers represents a kind of Cosmic Watergate, meaning that some few people in major governments have known since July, 1947, when two crashed saucers and several alien bodies were recovered in New Mexico, that indeed SOME UFOs are ET. As noted in 1950, it’s the most classified U.S. topic.
— None of the arguments made against conclusions One and Two by a small group of debunkers such as Carl Sagan, my University of Chicago classmate for three years, can stand up to careful scrutiny.
— The Flying Saucer story is the biggest story of the millennium: visits to Planet Earth by aliens and the U.S. government’s cover-up of the best data (the bodies and wreckage) for over fifty years.
Public defense
“Stan Friedman’s most important contribution was his vigorous and intellectually sound public defense of the continuing mystery of the UFO phenomenon, the utter failure of science to recognize this, and thus the need for a serious sustained scientific investigation,” explains Mark Rodeghier, Scientific Director of the J. Allen Hynek Center for UFO Studies.
“His most important research was done on government documents and on the fabled Roswell UFO crash, which he demonstrated is not easily explained,” Rodeghier told Inside Outer Space.
For more information regarding Friedman and his UFO research, go to:

Lunar sample curators Charis Krysher, Juliane Gross, and Andrea Mosie were involved in extruding Apollo 17 sample 73002 from its container.
Credit: NASA
Scientists at NASA’s Johnson Space Center (JSC) in Houston, Texas have opened untouched samples brought back from the Moon during the Apollo era.
The rock and soil samples will be studied as part of the Apollo Next Generation Sample Analysis (ANGSA) initiative, which is leveraging advanced technologies to study Apollo samples by using new tools that were not available when the samples were originally returned to Earth.

Apollo 17 imagery from December 1972 mission: Sample 73001 – 809 grams; Sample
73002 – 430 grams. Core, double drive tube, unopened until November 5, 2019. Credit: Apollo 17/NASA
Nerve-wracking
Rutgers University scholar Juliane Gross was one of three women scientists who opened the pristine Apollo 17 sample on November 5th. Apollo 17 moonwalkers collected the lunar specimens in December 1972.
“It was such a humbling experience to be part of this and totally nerve-wracking because we couldn’t make any mistakes,” said Gross, an associate professor at Rutgers in the Department of Earth and Planetary Sciences in the School of Arts and Sciences. “But it was absolutely mind-blowing and so exciting at the same time.”
Gross said in a Rutgers University statement that it was hard and awkward to open and extrude the core sample. The reason: “everything had to be done inside a nitrogen-gas filled glovebox and we wore big gloves that made it hard to feel and grab tools,” Gross said. “But we had practiced a lot with a practice glovebox, so we worked really well together and all went smoothly with opening and extruding the core.”

Location of double drive tube at station 3, Apollo 17.
Credit: Apollo 17/NASA
New insights
The ANGSA multigenerational and multidisciplinary team will systematically examine samples 73002 and 73001, part of a two-foot long “drive tube” of regolith, collected by astronauts Harrison Schmitt and Gene Cernan from a landslide deposit near Lara Crater at the Apollo 17 site.
“The findings from these samples will provide NASA new insights into the Moon, including the history of impacts on the lunar surface, how landslides occur on the lunar surface, and how the Moon’s crust has evolved over time,” adds Chip Shearer, science co-lead for ANGSA in the Lunar Curation Laboratory at NASA’s JSC and a visiting scientist at the Lunar and Planetary Institute (LPI). “This research will help NASA better understand how volatile reservoirs develop, evolve and interact on the Moon and other planetary bodies, in an LPI statement.

NASA’s Artemis return humans to the Moon by 2024 program.
Credit: NASA
The ANGSA team is functioning as participants in a low-cost lunar sample return mission. This is a vital link between the Apollo Program and the future exploration of the Moon by the Artemis Program.

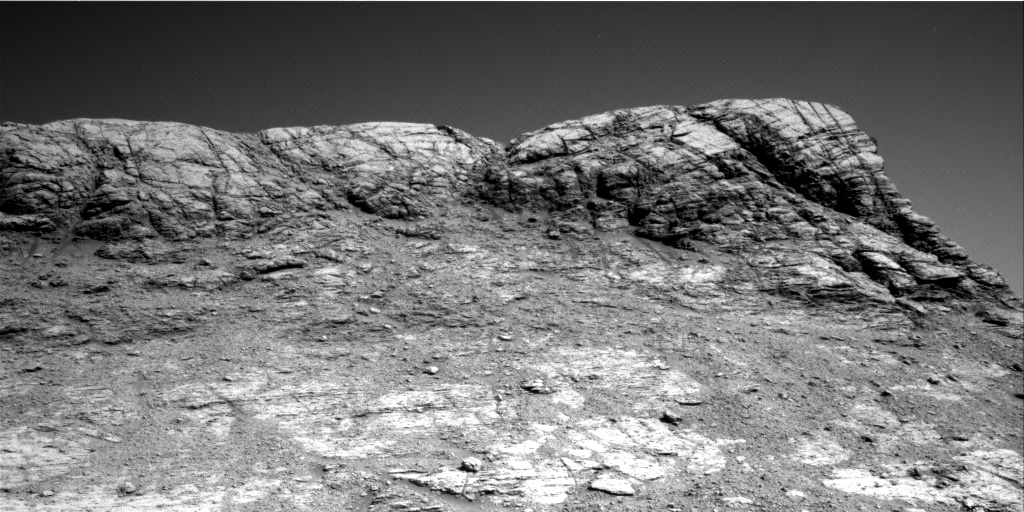
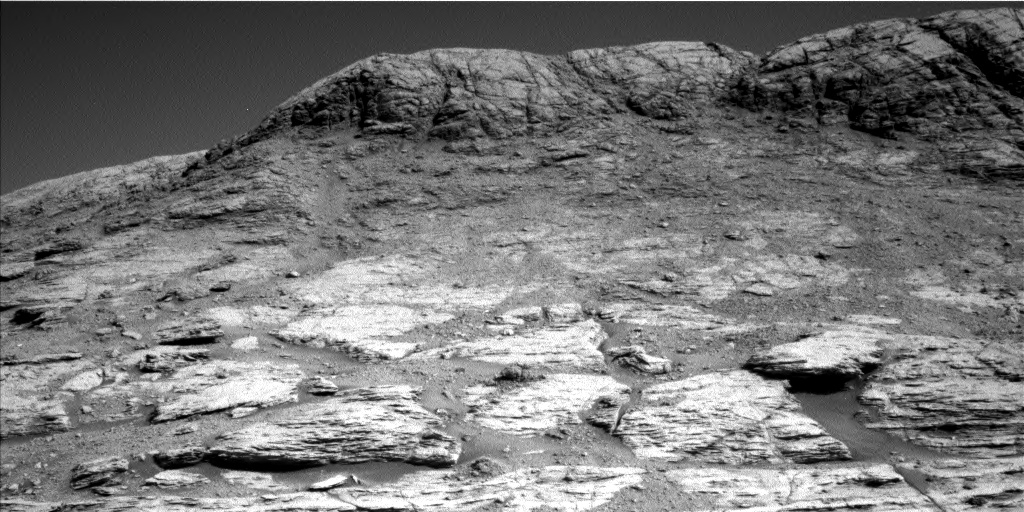
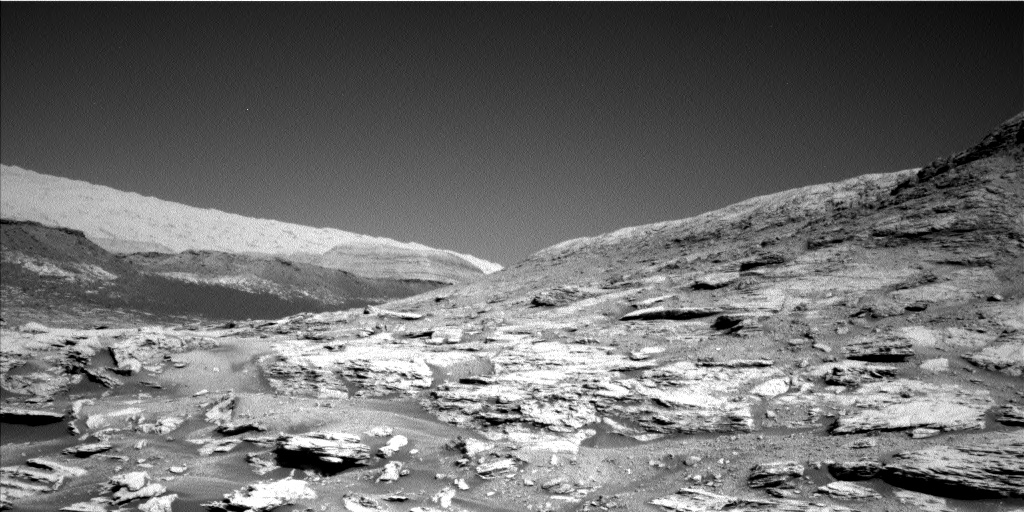
Curiosity Navigation Camera Left B image taken on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now wrapping up Sol 2583 duties.
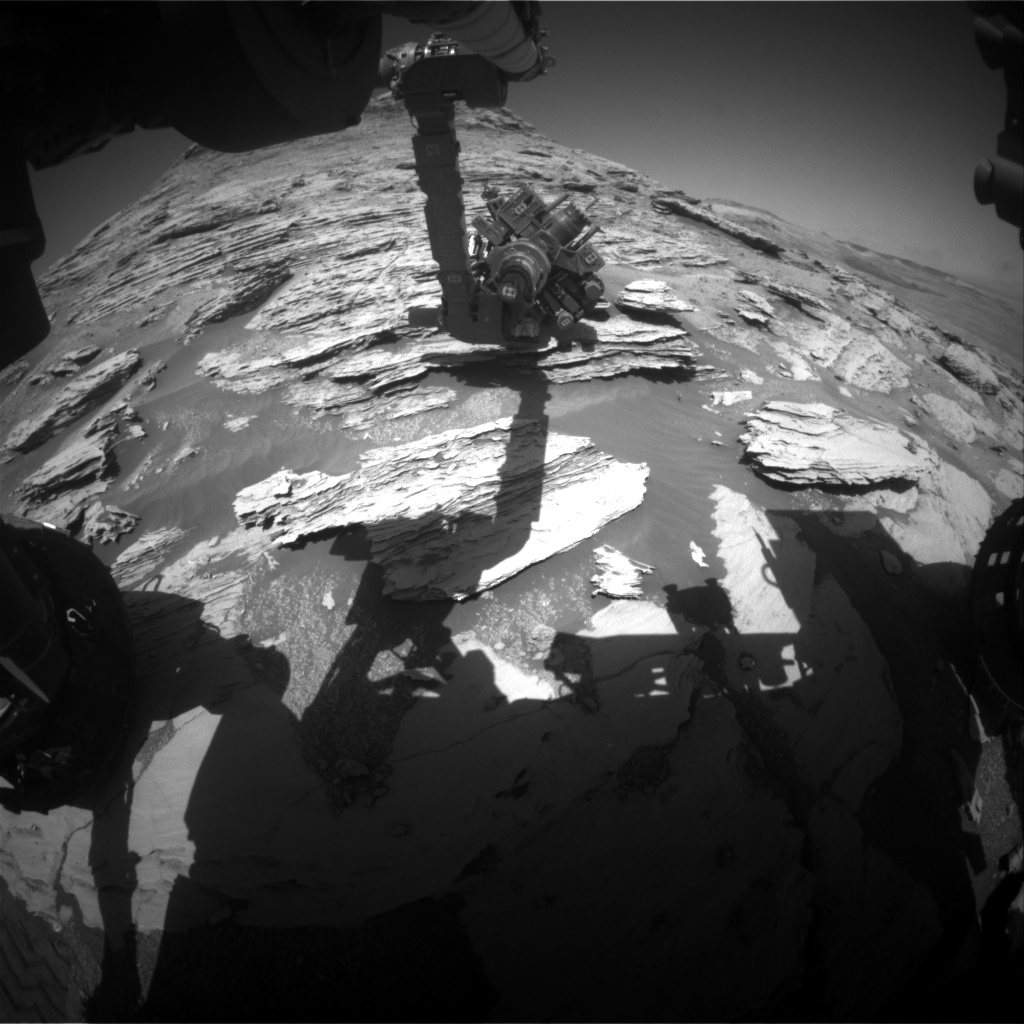
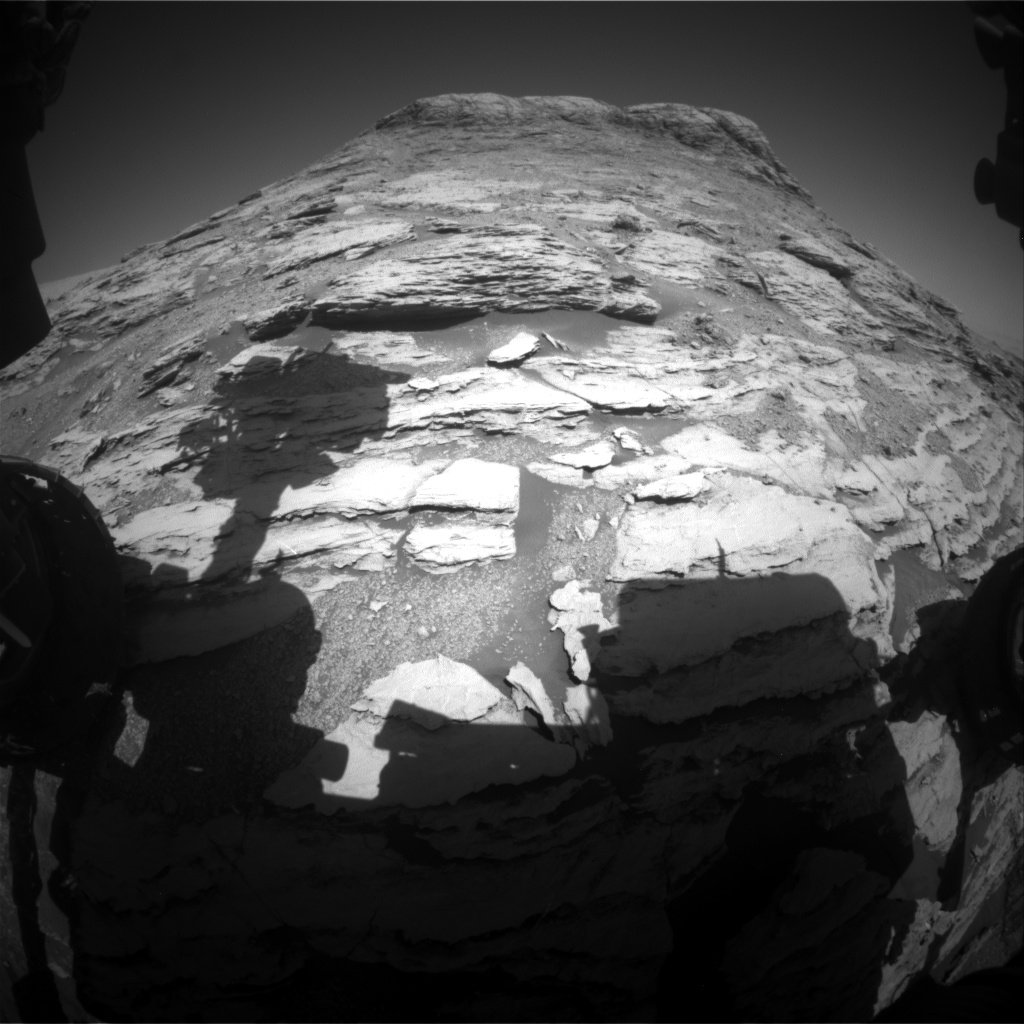
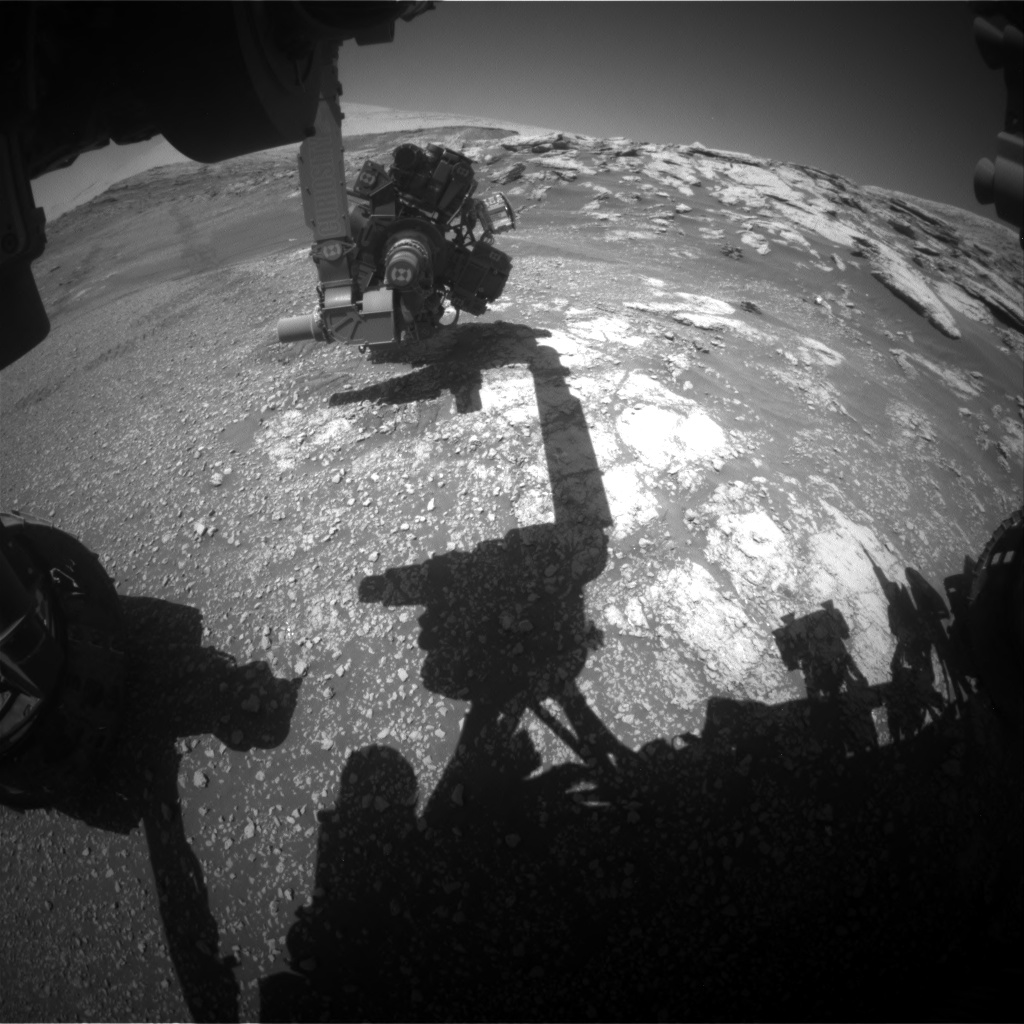
Curiosity Front Hazard Avoidance Camera Left B image acquired on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech
Scott Guzewich, an atmospheric scientist at NASA’s Goddard Space Flight Center, reports that over the weekend, the robot drove further uphill on Central Butte.
The Mars machinery is examining the complex layering that seems to be present at the butte.
Compelling workspace
Guzewich notes that imagery of the rover’s compelling workspace shows that the location was worth a few days of investigation.

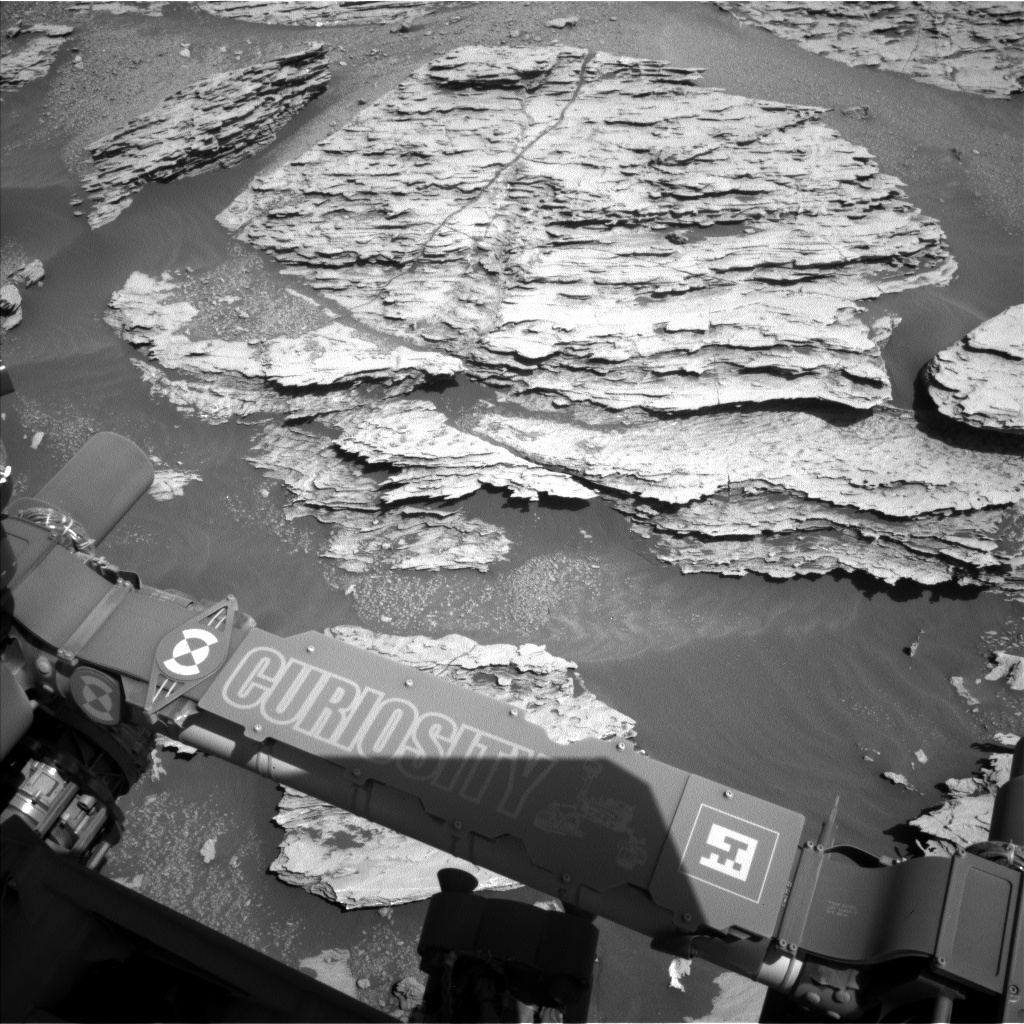
Curiosity Navigation Camera Left B image taken on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech
“However, Curiosity is on a rather steep slope and tilted somewhat, which prevented us from being able to use the dust removal tool in this plan,” Guzewich adds.
Sample tactic
The plan is to use the Mars Hand Lens Imager (MAHLI) and the Alpha Particle X-Ray Spectrometer (APXS) on “Sourhope,” a vertically-oriented just below a dark-colored knob.
Curiosity Chemistry & Camera (ChemCam) Remote Micro-Imager (RMI) photo taken on Sol 2583, November 12, 2019.
Credit: NASA/JPL-Caltech/LANL
Also planned, Guzewich continues, is use of the Chemistry and Camera (ChemCam) on Sourhope in addition to “Foggy Moss” and “Hoxa.”
“The goal is to see if some of the material at the top of the butte (which we can’t directly reach), might have fallen down to this location where we can sample it,” Guzewich explains.
Curiosity Chemistry & Camera (ChemCam) RMI photo showing laser shots acquired on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech/LANL

Curiosity Navigation Camera Left B image taken on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech
On the second sol of the current plan, Mastcam images of these targets will be taken in addition to the top of the butte, and then search for dust devils and water ice clouds with Navcam, Guzewich concludes.
Curiosity Front Hazard Avoidance Camera Right B image taken on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now wrapping up Sol 2582 tasks. New imagery shows the robot carrying out science duties in exploring its local surroundings:
Curosity Right B Navigation Camera photo taken on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech

Curiosity Left B Navigation Camera image acquired on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech

Curiosity Left B Navigation Camera image taken on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech
Curosity Right B Navigation Camera photo acquired on Sol 2582, November 11, 2019.
Credit: NASA/JPL-Caltech
Curiosity Right B Navigation Camera image acquired on Sol 2580, November 9, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now wrapping up Sol 2581 tasks.
A sampling of imagery from the robot shows its current surroundings:
Curiosity Right B Navigation Camera image taken on Sol 2580, November 9, 2019.
Credit: NASA/JPL-Caltech

Curiosity Right B Navigation Camera image acquired on Sol 2580, November 9, 2019.
Credit: NASA/JPL-Caltech
Curiosity Right B Navigation Camera image taken on Sol 2580, November 9, 2019.
Credit: NASA/JPL-Caltech

Curiosity Right B Navigation Camera image acquired on Sol 2580, November 9, 2019.
Credit: NASA/JPL-Caltech

Curiosity Chemistry & Camera (ChemCam) Remote Micro-Imager (RMI) photo taken on Sol 2581, November 10, 2019.
Credit: NASA/JPL-Caltech/LANL
Curiosity Chemistry & Camera (ChemCam) Remote Micro-Imager (RMI) photo acquired on Sol 2581, November 10, 2019.
Credit: NASA/JPL-Caltech/LANL
Left Navigation Camera Left B image taken on Sol 2577, November 6, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover, now in Sol 2578, is continuing its exploration of Central Butte with a two-sol “touch-and-go” plan.
That means that the rover will have one sol of contact science at its current stop before the robot continues on her drive around the base of the butte.
Left Navigation Camera Left B image taken on Sol 2577, November 6, 2019.
Credit: NASA/JPL-Caltech
“Early on in planning, there was some discussion about the drive route; ultimately, the team decided to head south to get a closer view of some of the exposed layering within the butte,” reports Mariah Baker, Planetary Geologist at Johns Hopkins University.
Curiosity Front Hazard Avoidance Camera Left B photo taken on Sol 2577, November 5, 2019.
Credit: NASA/JPL-Caltech
Drive direction
A new plan included time for a short science block before the drive, which the rover science team filled with a Chemistry and Camera (ChemCam) Remote Micro-Imaging (RMI) camera mosaic of target “Crimond” and a Mastcam mosaic that will provide increased coverage of Curiosity’s drive direction.
Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) measurements were also planned for the bedrock target “Pobie Bank,” comprising the “touch” part of this plan.
Curiosity Left Navigation Camera Left B photo acquired on Sol 2577, November 5, 2019.
Credit: NASA/JPL-Caltech
After this science block, the rover was set to “go” to her next stop, which will bring it a little further up the base of the butte.
New workspace
Standard post-drive imaging using Navcam, Mastcam, and Mars Descent Imager (MARDI) will round out the first sol and will provide a better look at its new workspace.
The second sol in the plan contains one untargeted science block, which will include a ChemCam passive measurement, a ChemCam Autonomous Exploration for Gathering of Increased Science (AEGIS) observation, and a Mastcam stereo mosaic of the top of the butte.

Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2577, November 6, 2019.
Credit: NASA/JPL-Caltech/MSSS
Environmental observations
The team also planned a set of environmental observations including Rover Environmental Monitoring Station (REMS) and Dynamic Albedo of Neutrons (DAN) measurements, as well as Mastcam images of the crater rim, a Mastcam sky survey, a Navcam line-of-sight observation, and a Navcam supra horizon movie.
“This data will help give us a head start on our next plan so that we can use our time to examine Central Butte more closely,” Baker notes. “In order to accomplish all of our science goals at this location, the rover will make a couple more stops along the side of the butte before continuing along the long-term strategic route.”

India’s Chandrayaan-2 orbiter – up and operating.
Credit: ISRO
India’s Chandrayaan-2 orbiter is chalking up scientific findings as it circles the Moon, making use of eight state-of-the-art scientific instruments.

Schematic of the origin and dynamics of 40Ar in lunar exosphere.
As part of its early operation, India’s Moon orbiter has detected 40Ar in the lunar exosphere from an altitude of roughly 62 miles (100 kilometers), capturing the day-night variations of concentration. 40Ar being a condensable gas at the temperatures and pressures that prevail on the lunar surface, condenses during lunar night. After lunar dawn, the 40Ar starts getting released to the lunar exosphere (blue shaded region in figure).
Credit: ISRO
The orbiter’s Chandra Atmospheric Composition Explorer-2 (CHACE-2) payload has detected Argon-40 in the tenuous lunar exosphere – so thin that gas atoms very rarely collide with each other.
Argon-40 (40Ar), which is one of the isotopes of the noble gas Argon, is an important constituent of the lunar exosphere. The radioactive 40K nuclide, which is present deep below the lunar surface, disintegrates to 40Ar, which, in turn, diffuses through the intergranular space and makes its way up to the lunar exosphere through seepages and faults on the Moon’s landscape.

Chandrayaan-2’s Dual-Frequency Synthetic Aperture Radar (DF-SAR) payload can help unambiguously identify and quantitatively estimate lunar polar water-ice in permanently shadowed regions.
Credit: ISRO
Radar remote sensing
The Chandrayaan-2 orbiter has also made initial images and observations by its Dual-Frequency Synthetic Aperture Radar (DF-SAR).
SAR is a powerful remote sensing instrument for studying planetary surfaces and subsurface due to the ability of the radar signal to penetrate the surface. It is also sensitive to the roughness, structure and composition of the surface material and the buried terrain.
The main scientific objectives of this SAR payload are:
— High-resolution lunar mapping in the polar regions
— Quantitative estimation of water-ice in the polar regions
— Estimation of regolith thickness and its distribution

Pre-launch photo shows India’s Pragyan rover mounted on the ramp projecting from out of the sides of Vikram lunar lander. Vikram and the rover were scheduled on September 6 to land on near the Moon’s south polar region – but crashed onto the lunar surface.
Credit: ISRO
Lander lost
Chandrayaan-2 was launched by the Indian Space Research Organization (ISRO) on July 22, 2019. The craft entered lunar orbit on August 20, 2019.
At liftoff, this spacecraft mission consisted of a lunar orbiter, the Vikram Moon lander, and the Pragyan lunar rover. Vikram and the rover were scheduled on September 6 to land on near the Moon’s south polar region – but crashed onto the lunar surface.
Meanwhile, the orbiter experiments are to be operational for 7 years, according to ISRO.
A Chandrayaan-2 data users meeting was held on October 22, 2019 in New Delhi.

Chandrayaan-2 data users meeting.
Credit: ISRO

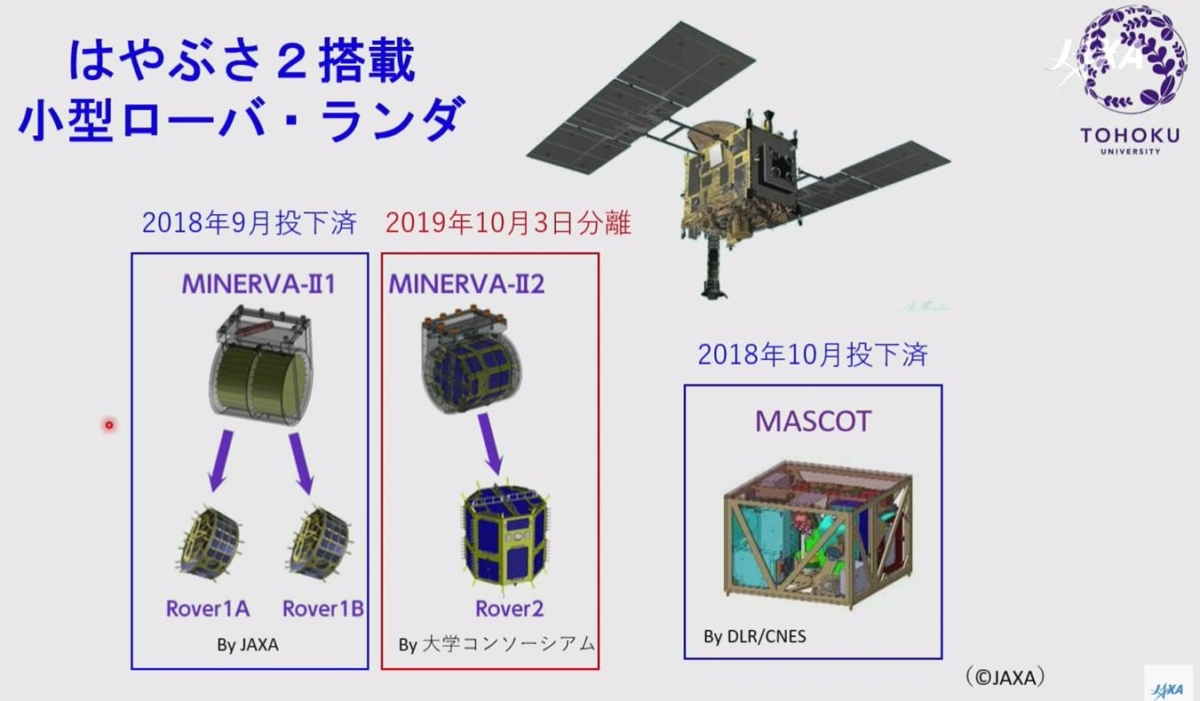
MINERVA-II2 rover successfully reached asteroid Ryugu.
Credit: JAXA
Japan’s Hayabusa2 continues to be an impressive asteroid mission.
The MINERVA-II2 rover was released from Hayabusa2 back on October 2, 2019.

MINERVA-II2 rover release from Hayabusa2 asteroid explorer.
Credit: JAXA/Tohoku University/Screengrab Inside Outer Space
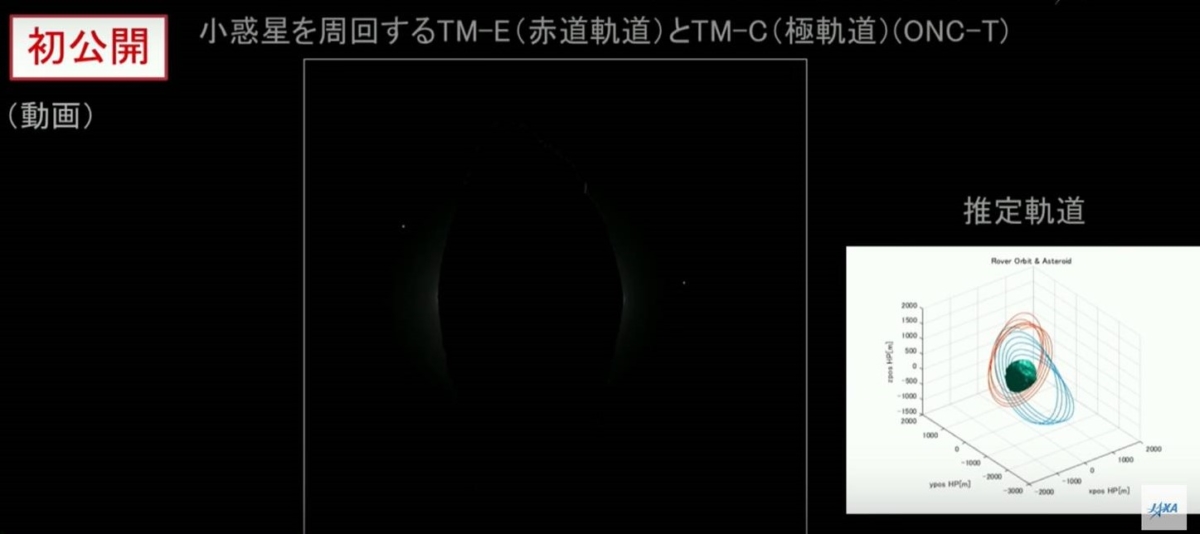
Based on the optical observation results using a set of spacecraft-mounted cameras and radio signals from the deployed rover, the device reached the asteroid’s surface on October 3rd.
The rover orbited around asteroid Ryugu 1.25 times before landing on the space rock, reports Kazuya Yoshida, Professor and Director of the Space Robotics Lab at Tohoku University.
The rover was named ULULA (University-made Landing Unit for Locomotion on Asteroid) which is a Latin word meaning owl.
Hardware successfully deployed from Hayabusa2.
Credit: JAXA/Screengrab Inside Outer Space
Rover 1a and 1b were already named Hibou and Owl, Yoshida told Inside Outer Space.
Credit: JAXA/Screengrab Inside Outer Space
Gravity field
Including the target makers, named Sputnik and Explorer, which were inserted into polar and equatorial orbits at the asteroid, “we obtained a good amount of data for the analysis of anomaly of the gravity field of Ryugu,” he said.
Kazuya Yoshida, Professor and Director of the Space Robotics Lab at Tohoku University. Credit: JAXA/Screengrab Inside Outer Space
On October 28, there was a Japan Aerospace Exploration Agency (JAXA) press conference in Tokyo to provide a quick summary of the target markers and the MINERVA-II2.
Spoken in Japanese, this press event can be seen here at:
https://www.youtube.com/watch?v=y1mzFMk3Tf0
Press event details deployment of MINERVA-II2.
Credit: JAXA/Screengrab Inside Outer Space
Special thanks to professor Kazuya Yoshida for the updated information.

