Author Archive

Artistic view of EarthTV satellite.
Credit: Sen/NanoAvionics
A constellation of nano-satellites is slated to stream real-time and timely videos from space.
The service, which will include a freely accessible app for individuals, will be used for monitoring environmental events and natural disasters such as wild fires, floods and storms, as well as monitoring climate change and movement of large groups of people.
Multiple perspectives of Earth
Sen, a British space company, intends to provide real-time and timely Ultra-High Definition (UHD) video of Earth. The company has contracted the Vilnius, Lithuania based NanoAvionics to build the first five nano-satellites of the constellation.
Each satellite will be equipped with several UHD cameras, providing multiple perspectives of Earth, from wide angle imagery down to 1.5 meter resolution.
The envisaged launch of the first nano-satellite, EarthTV-1, will take place by mid-2021. Following a successful test demonstration of EarthTV-1, sending real-time UHD quality video from low Earth orbit (LEO), NanoAvionics will build the remaining four nano-satellites for launch in 2022. The satellite system is designed to have a mission lifetime of 10 years in LEO.

Last year, Sen successfully demonstrated its 4K video streaming platform in orbit, hosted aboard a satellite manufactured by S. P. Korolev Rocket and Space Public Corporation Energia (“RSC Energia”).
Credit: Sen. © Sen Corporation Ltd all rights reserved.
See unfolding events
“Our planet is constantly changing and Sen’s satellites will provide a new and persistent way of seeing events unfolding, empowering humanity to witness the evolution of our planet in a unique way. We hope to increase awareness of environmental events and human movement with information that can educate, inspire and empower people to change and improve the outcome,” says Charles Black, Founder and CEO of Sen in a company statement.
Sen’s videos will be freely accessible for individuals, with premium services for businesses and organizations. Sen will provide an open source data platform to enable partner organizations to build apps and analytics using the video data.
Sen aims to begin with cameras in LEO and plans to extend this to deeper space and even to deploy cameras on planetary orbiters, rovers and drones at the Moon, Mars and further into the Solar System.
Go to this Sen video at:

Gemini 3 crew, John Young (left) and Gus Grissom.
Credit: NASA/MSFC Archives
There is need for an experiential and multisensory approach in the design of future eating experiences in space.
Yes, space food has come a long way since astronaut John Young smuggled a corned-beef sandwich on board the Gemini 3 space mission in 1965.

Passengers mixing spice bombs and ingredients by shaking and throwing the mixing pod in microgravity. The longer they shake the pod, the stronger the food tastes.
Credit:
Obrist, et al.
With a series of commercial space flights set to launch in the upcoming years, academics at the University of Sussex and BI Norwegian Business School have investigated how the latest tech innovations and understanding around taste could be applied to create novel eating experiences in space.
Touch, taste, and smell
Marianna Obrist is leading the work, a professor of Multisensory Experiences and Head of the Sussex Computer Human Interaction (SCHI ‘sky’) Lab at the University of Sussex in the United Kingdom. She is a leading expert exploring our understanding of human touch, taste, and smell experiences and how they can be augmented through interactive technologies.
Credit: Obrist, et al.
Purpose of the research is to explore for the first time what technology could be used to serve up healthy, nutritious and tasty food for a new generation of space travelers, including tourists.
That food would be designed to combat the challenges of zero-gravity dining and extreme isolation. In addition 3-D printed food would be made to order from family recipes. Also, the research delves into virtual reality, music, visual projections, atmospheric light, temperature, and humidity to recreate distinctive multisensory Earth atmospheres.
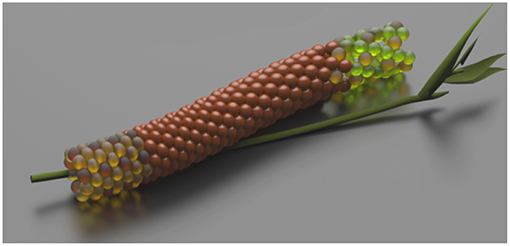
3D printed bar that includes three different courses in a single, eatable item.
Credit: Obrist, et al
Next gen astronauts and tourists
So put aside squeeze tubes, leave those illegal imports of corned-beef sandwiches at the launch pad, forget helpings of applesauce and high-calorie cubes of protein, fat and sugar and get ready for:
Spice Bomb Mixing – An “emotional” cleanser combating the diminished flavor perception in space caused by stuffiness in the nose. Solid spices and ingredients are not commonly used in space food because of the risk of them floating away. But the team proposes a mixing pod which would dissolve into the food – injecting a meal with flavor and texture.
Flavor Journey 3D Printer – An astronaut or tourist could order a flavor profile from family, friends, or chefs which would be recreated through a food printer within the spacecraft. Potentially an astronaut could enjoy a “bar” that integrates several courses in one print.
Earth Memory Bites – Small bites that contain distinct flavors representing different regions, cultures, or specific experiences and then embedded in a specific dining environment through projection mapping and VR for a shared dining experience with friends and family. Music, visual projections, atmospheric light, temperature, and humidity could all be used to recreate distinctive Earth atmospheres.

Adding spice bomb modules into the mixing pod.
Credit: Obrist, et al.
Hypothetical journeys
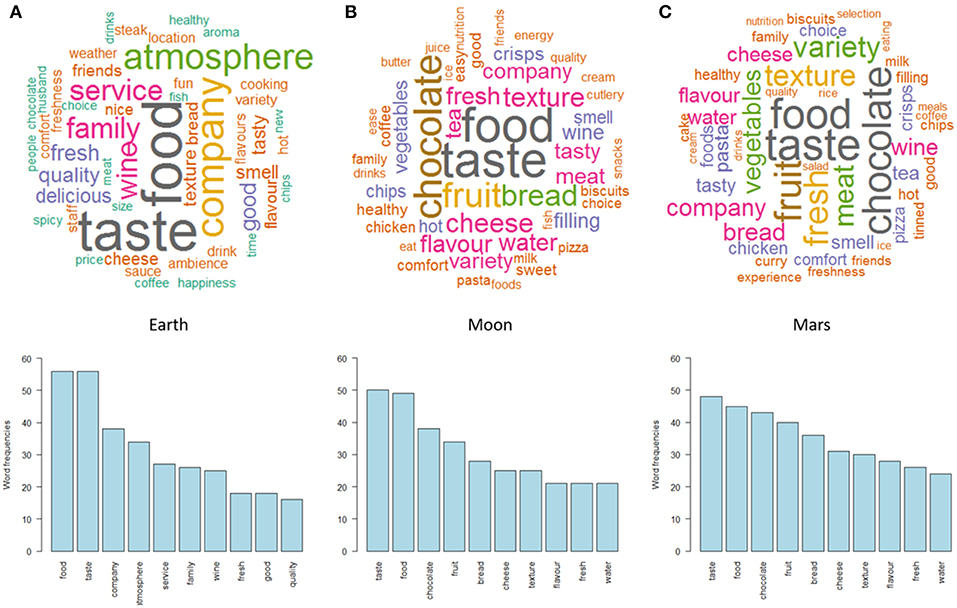
In a research paper, Obrist and her colleagues used two hypothetical journeys, one to the Moon and one to Mars, accounting for long- and short-term space flights, to inspire the general public’s imagination about eating in space.
“Designing human-food interactions in space is not a trivial task,” Obrist explains in a University of Sussex statement. “Before astronauts eat in space, they need to undergo dedicated training on Earth, and multiple challenges associated with nutrition, production, conservation, and transportation, among others, have to be considered.”
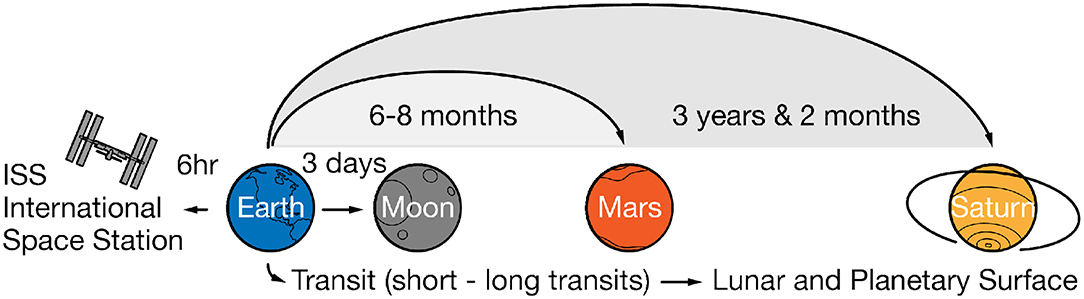
Design opportunities beyond the International Space Station (ISS), accounting for transit flights (short- and long-spaceflights to the Moon and Mars) and ultimately human settlements on lunar and planetary surfaces.
Credit: Obrist, et al.
Given the increasing possibilities of short and long-term space travel to the Moon and Mars, Obrist adds, “it is essential not only to design nutritious foods but also to make eating an enjoyable experience. To date most research on space food design has emphasized the functional and nutritional aspects of food. There have been no systematic studies that focus on the human experience of eating in space.”
To read the work — “Space Food Experiences: Designing Passenger’s Eating Experiences for Future Space Travel Scenarios” — published in the journal, Frontiers in Computer Science– go to:
https://www.frontiersin.org/articles/10.3389/fcomp.2019.00003/full

Credit: NASA
And you thought dealing with Pluto as a planet was tough.
There is an enduring debate over capitalizing the M for Earth’s Moon. Some organizations, like NASA, have it capitalized in their style guide. However, the Associated Press (AP), considered a gold standard for guidelines in print journalism, downgrades our celestial next door neighbor to a small m.

Earth’s Moon and cislunar space looms large in our future.
Credit: ESA/NASA
Will this brew-ha over editorial rules ever be resolved…for good?
Key individuals make the case for upper case or lower.
Go to my new Space.com story at:
A capital debate: Should Earth’s natural satellite be ‘Moon’ or ‘moon’?
How should we write the name of Earth’s nearest celestial neighbor?
https://www.space.com/moon-name-controversy-capital-letter.html
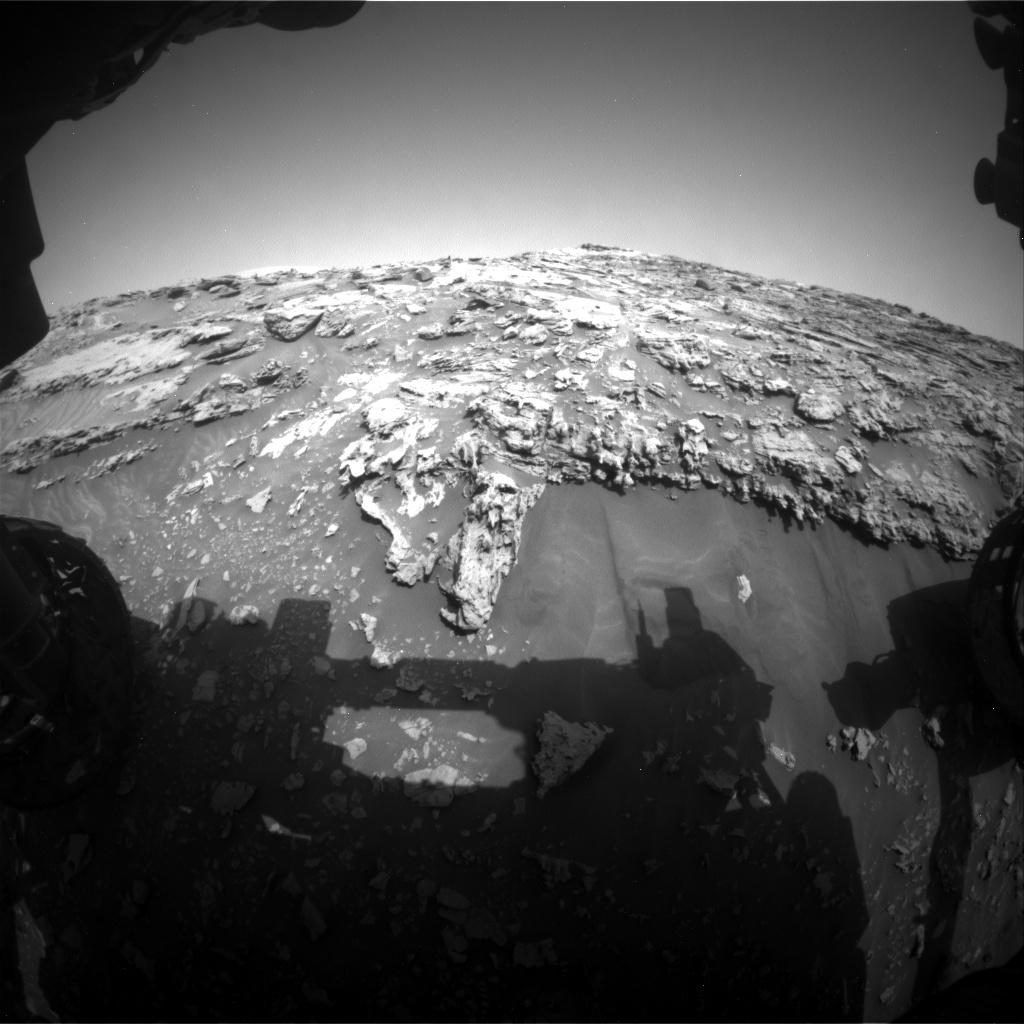
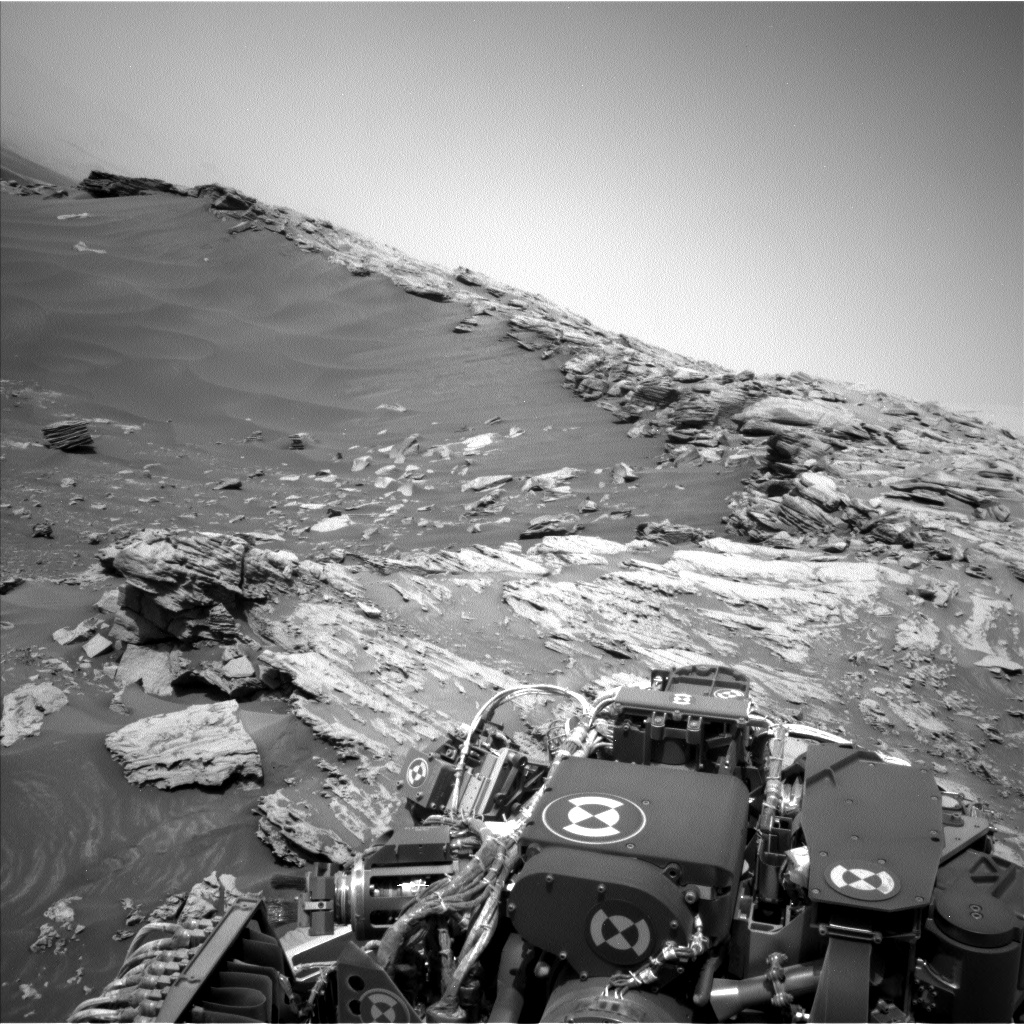
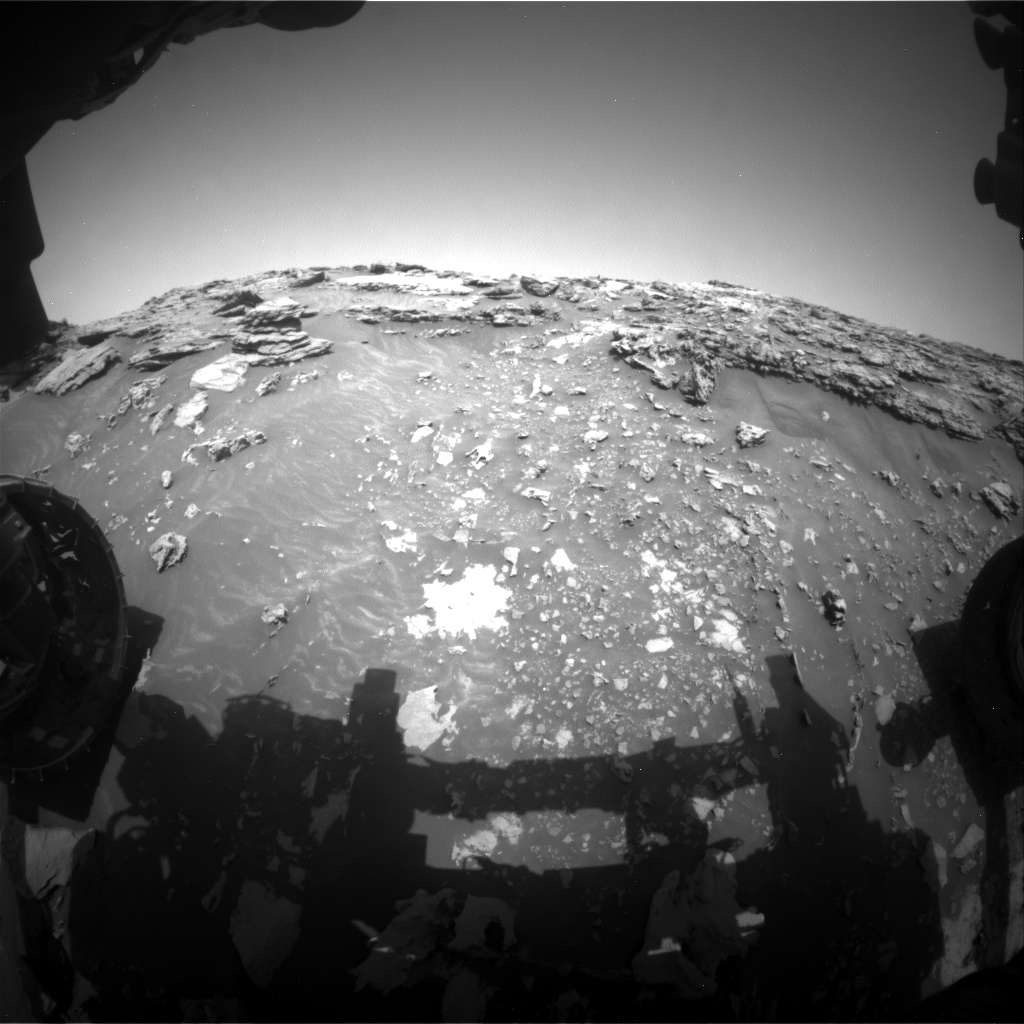
Extreme Tilt! Curiosity Front Hazard Avoidance Camera Left B image acquired Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is wrapping up Sol 2693 duties.
The robot is making progress on its “impressive ascent,” reports Susanne Schwenzer, a planetary geologist at the Open University; Milton Keynes, U.K.
“The planning started with intense discussions on the question of what to do, and for a very good reason,” Schwenzer notes. “The sedimentology experts in the team had determined that we can see very interesting structures related to a possible contact between the Murray and the overlying pediment.”
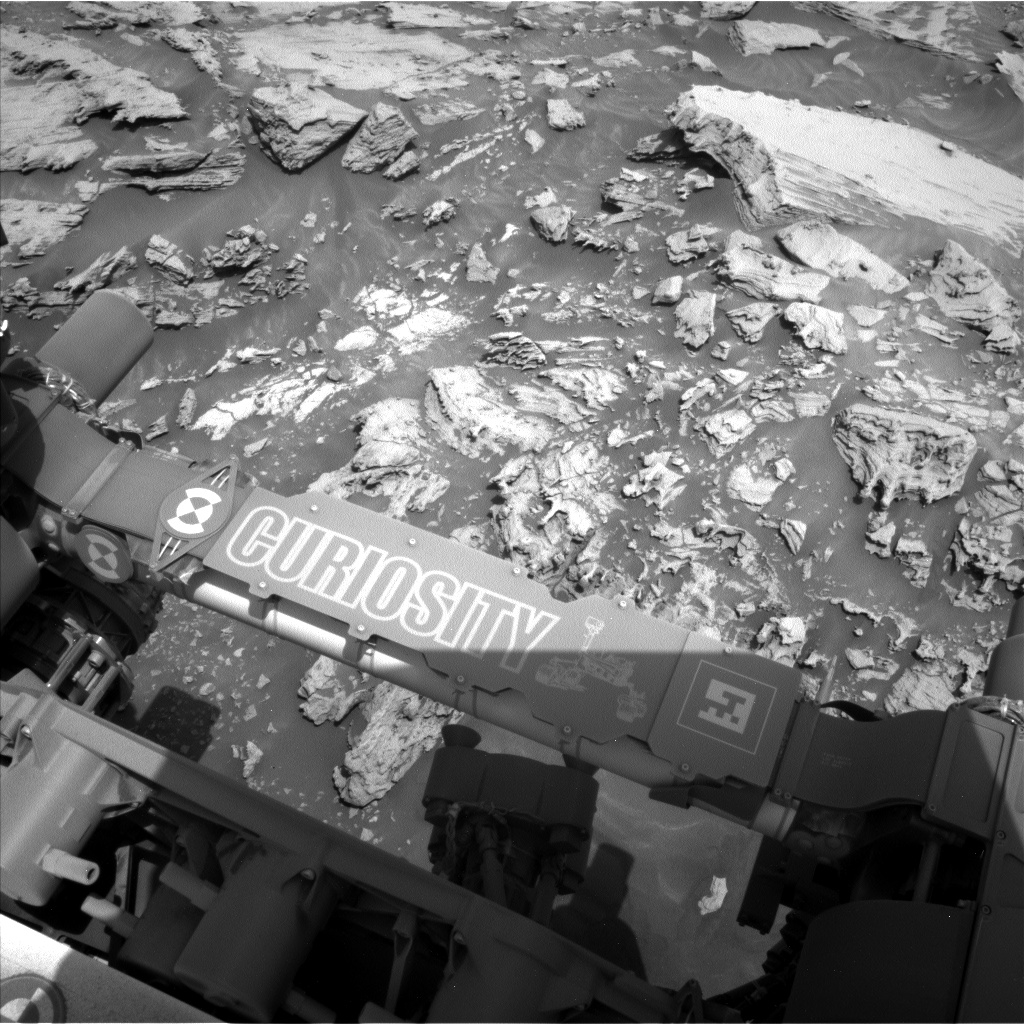
Curiosity Left B Navigation Camera photo acquired Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
Small adjustment
Decisions were made early in planning to possibly collect contact science near the contact, or if the rover should continue its climb to the top.
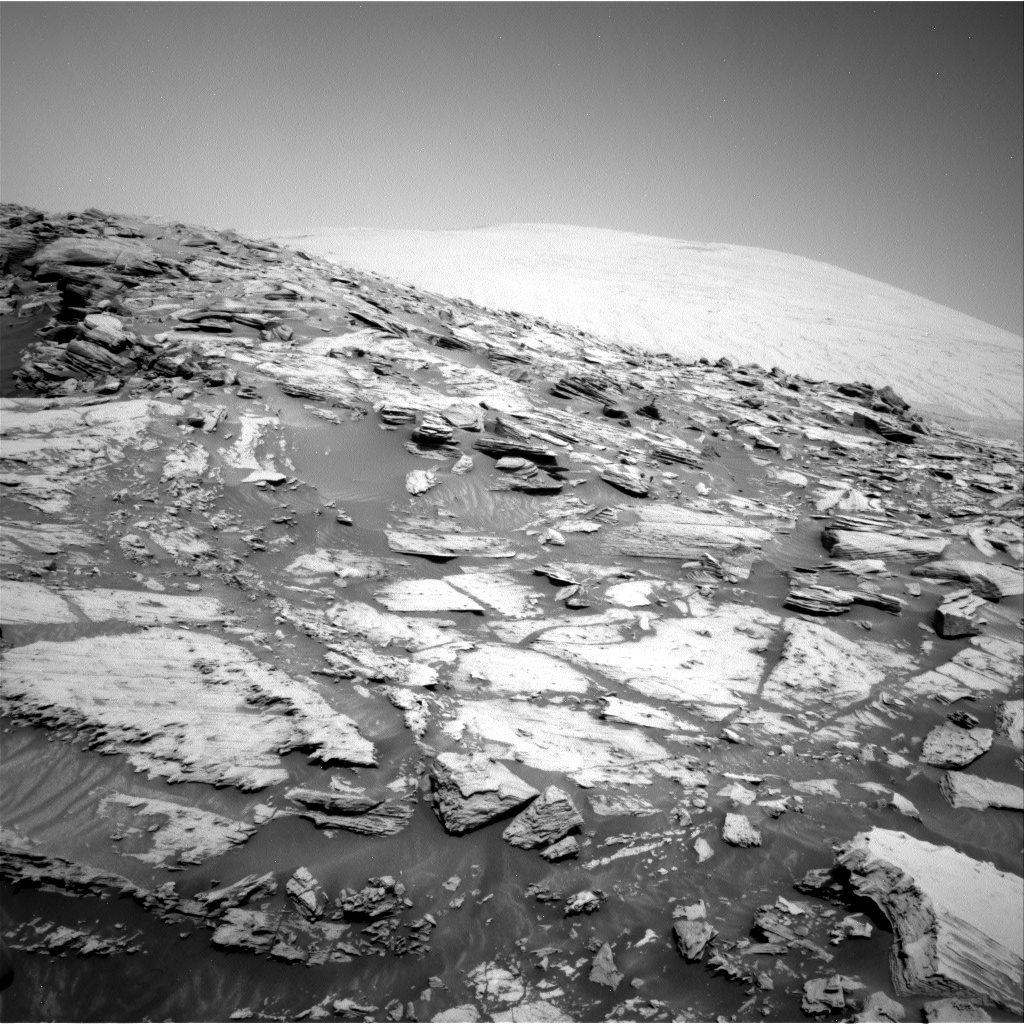
Curiosity Left B Navigation Camera photo acquired Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
“Changing the plan from ‘keep moving’ to ‘stay’ is never taken lightly, and the discussions reflected this as we were weighing options. The reason for the discussion was that we found a site close to the contact that looked much more accessible, detail rich and valuable up close than it had originally looked from the bottom of the hill,” Schwenzer adds.
This justified not driving all the way onto the top of the pediment…and instead doing a small adjustment to allow Mars researchers to do contact science at interesting targets.
“The data we will be acquiring here is getting the team excited!”

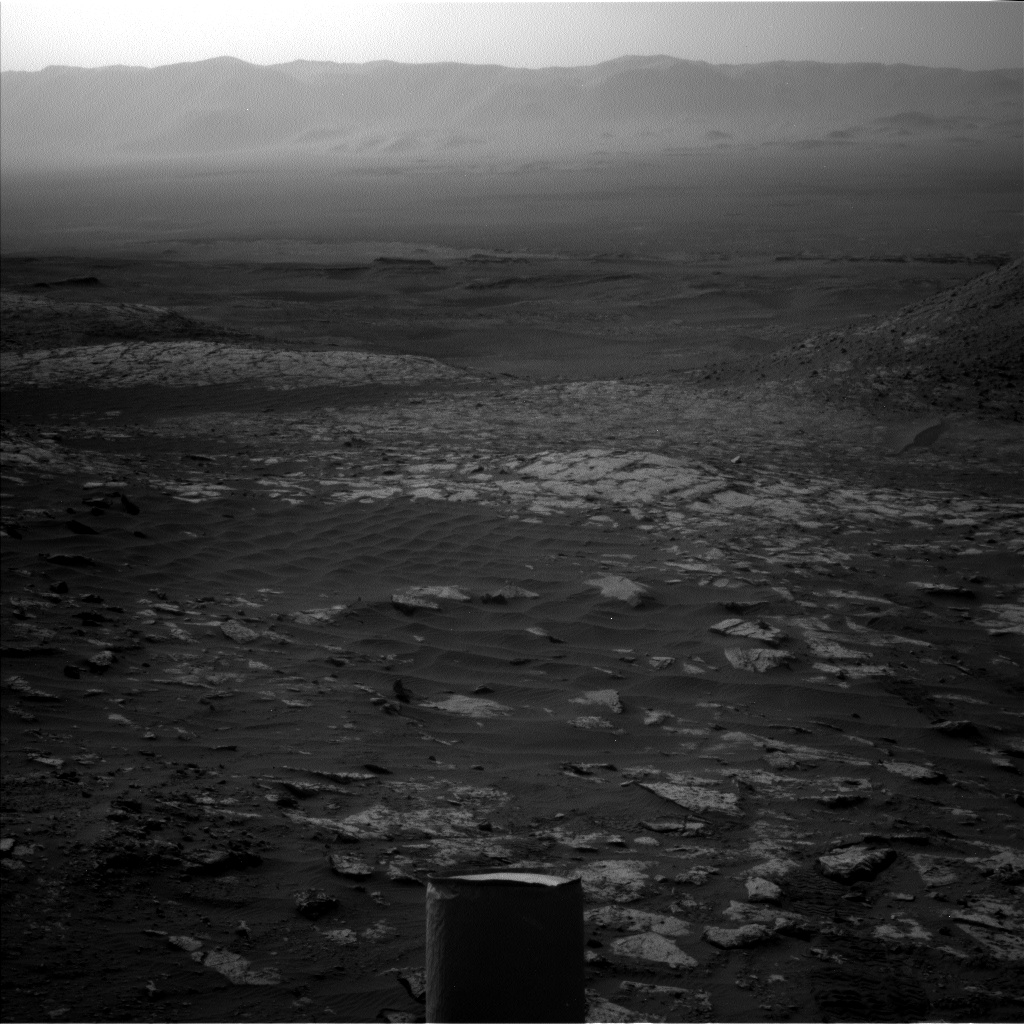
Curiosity Right B Navigation Camera image taken Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
Bedrock targets
A recent plan has the rover scheduled to have two Chemistry and Camera (ChemCam) targets on bedrock: target “Ariundle” is in front of the rover.
The ChemCam target “Hutton’s Section” is higher up on the slope and thus closer to the pediment. “We are expecting to see some differences in chemistry between the two. Mastcam has a mosaic in this plan, which covers the two targets and documents the sedimentary structures around them,” Schwenzer points out.
Challenging terrain
The plan calls for slightly adjusting the rover to prepare for an Alpha Particle X-Ray Spectrometer (APXS) measurement in the area of the Hutton’s Section target.
“The adjustment should get us into a position to where we can reach the target with our arm,” Schwenzer explains. But use of the rover’s robot arm is yet to be seen, because the robot is driving through very challenging terrain.
On the last drive the tilt of the rover exceeded 30 degrees.
“And, of course, that sparked the question if we are now holding the martian rover tilt record. Well, the colleagues who also did operations on the MER rovers reminded us that the MER rover Opportunity still holds the record by a fraction of a degree,” Schwenzer reports.
Curiosity Right B Navigation Camera image taken Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
Tilt record?
The plan also includes further imaging and a ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) observation after the drive.
“This will set us up nicely for the next planning, hopefully with some contact science if it can be done safely – and then to continue the climb onto the pediment,” Schwenzer concludes. “Will we break the martian tilt record? The jury is still out – and a big shout of ‘awesome, thank you’ goes to the engineers, who make Curiosity climb as never before!”
In an earlier report, Lucy Thompson, a planetary geologist at University of New Brunswick, notes that Curiosity successfully completed the first drive of the ascent path onto the Greenheugh pediment, and ended up at a 26.7 degree tilt and at the highest elevation so far on Mount Sharp.
Curiosity Left B Navigation Camera photo taken Sol 2692, March 3, 2020.
Credit: NASA/JPL-Caltech

Raytheon and the National Science Foundation radio astronomy facilities to detect dark asteroids in space.
Credit: Raytheon
A new collaboration to detect and characterize near-Earth asteroids large enough to cause significant damage melds together radio astronomy and radar techniques.
The new agreement brings together the talents of Raytheon and the National Science Foundation radio astronomy facilities to detect dark asteroids in space.
Radar imagery

100m Robert C. Byrd Green Bank Telescope.
Credit: Green Bank Observatory
The Raytheon-NRAO/GBO collaboration will integrate a radar transmitter into the Green Bank Telescope (GBT) in West Virginia and use the National Science Foundation’s far-flung Very Long Baseline Array (VLBA) as a receiver to provide a very detailed radar image.
The GBT and the VLBA will each point at the same celestial body, such as the Moon, to conduct radar experiments. This approach increases the probability of detection and characterization of objects out to the orbit of Jupiter and possibly farther.
New capabilities
“Very energetic dusty asteroids – we’re talking from several hundred feet to miles in size – don’t reflect sunlight very well, and that makes them incredibly difficult, if not impossible to detect in our solar system,” said Art Morrish, vice president, Raytheon Advanced Concepts & Technologies in a company statement.
“We’re collaborating with the [National Radio Astronomy Observatory] NRAO to combine radio astronomy and radar techniques to bring new capabilities to the astronomical community to solve problems like this,” Morrish added.

Credit: Green Bank Observatory
Next-generation
Tony Beasley, director of the National Radio Astronomy Observatory and Associated Universities Inc. vice president for Radio Astronomy Operations stated: “This partnership between Raytheon and NRAO/GBO is one of several promising research and technology collaborations we’re exploring that may greatly benefit our next-generation Very Large Array project.”
The NRAO and the Green Bank Observatory are facilities of the National Science Foundation, operated under cooperative agreement by Associated Universities, Inc.
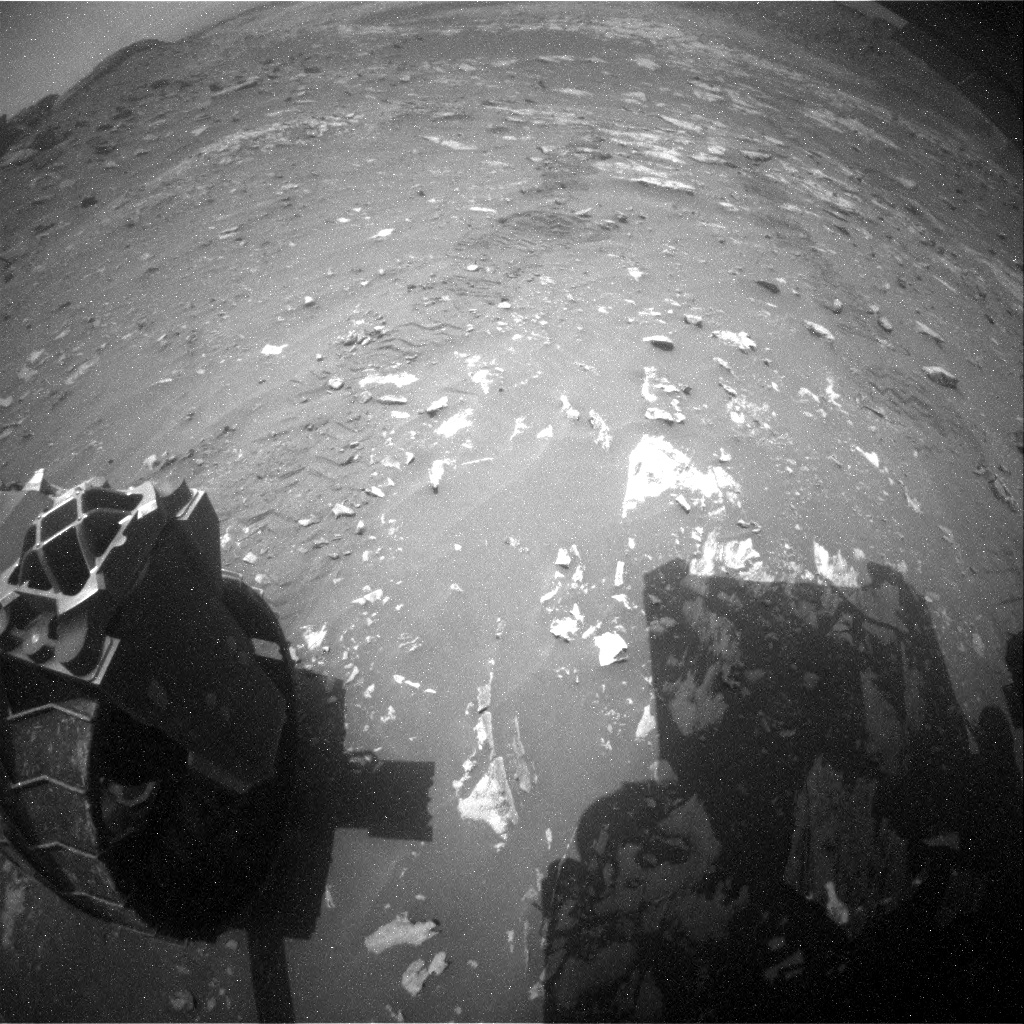
Curiosity Front Hazard Avoidance Camera Left B image taken on Sol 2692, March 3, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2693 tasks.
A selection of new imagery from the robot shows its progress to date:
Curiosity Rear Hazard Avoidance Camera Left B photo acquired on Sol 2692, March 3, 2020.
Credit: NASA/JPL-Caltech

Curiosity Left B Navigation Camera image acquired on Sol 2692, March 3, 2020.
Credit: NASA/JPL-Caltech

Curiosity Left B Navigation Camera image acquired on Sol 2692, March 3, 2020.
Credit: NASA/JPL-Caltech

Curiosity Left B Navigation Camera image taken on Sol 2691, March 2, 2020.
Credit: NASA/JPL-Caltech

Credit: NASA/JPL-Caltech/Univ. of Arizona
Road work
A newly released map shows the route driven by NASA’s Mars rover Curiosity through the 2691 Martian day, or sol, of the rover’s mission on Mars (March 2, 2020).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2664 to Sol 2691, Curiosity had driven a straight line distance of about 38.83 feet (11.83 meters), bringing the rover’s total odometry for the mission to 13.62 miles (21.92 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Yutu-2 rover (Jade Rabbit-2).
Credit: CNAS/CLEP
China’s Chang’e-4 lander and rover have concluded their work for the 15th lunar day. Both have switched to “dormant” mode for the 14-day lunar night.

Making tracks. China’s Yutu-2 robot dispatched from farside lander.
Credit: CNSA/CLEP
The rover — Yutu-2 — has worked much longer than its three-month design life, becoming the longest-working lunar rover on the Moon, reports the Xinhua news agency. It has driven over 1,300 feet (399.788 meters) on the farside of the Moon.
Farside landing
China’s Chang’e-4 mission was launched on December 8, 2018, making the first-ever soft landing on the Von Kármán crater in the South Pole-Aitken Basin on the farside of the Moon on January 3, 2019.
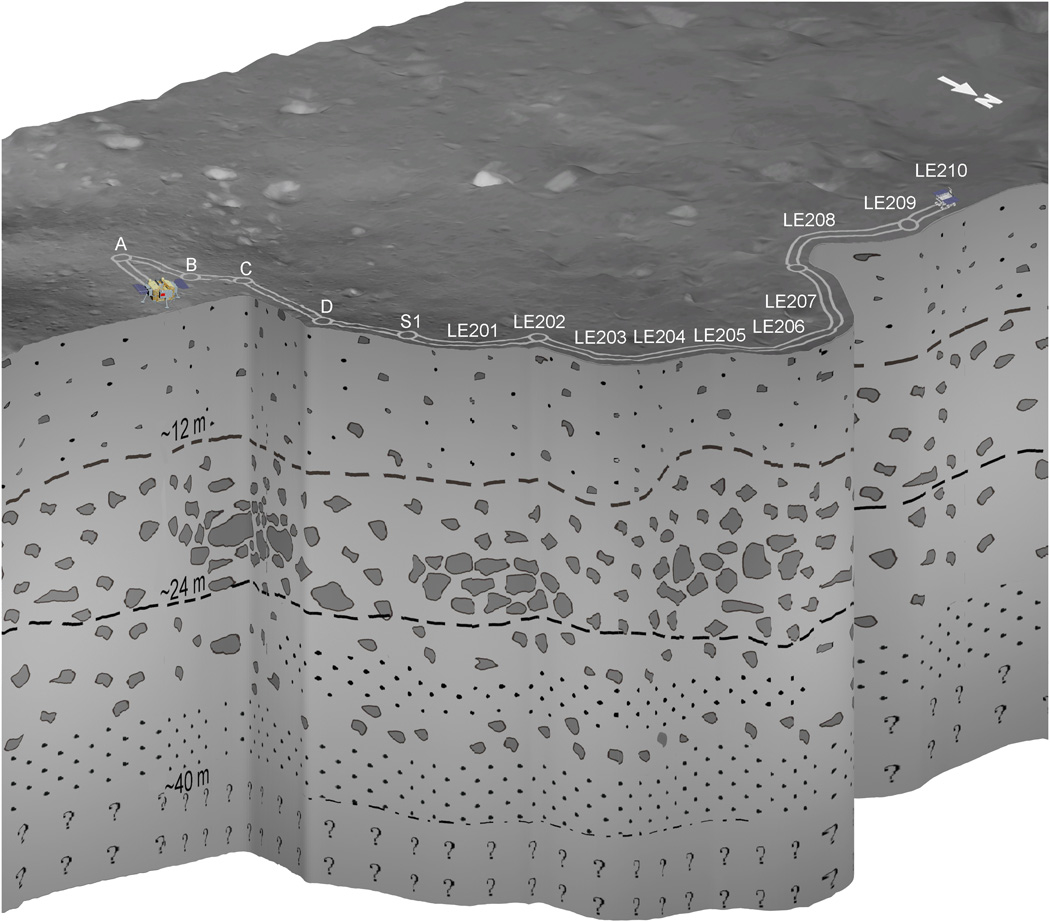
Schematic representation of the subsurface geological structure at the CE-4 landing site inferred from LPR observations.
Credit: Chunlai Li, et al.
The Yutu-2 rover is equipped with Lunar Penetrating Radar (LPR), transmitting radio signals deep into the surface of the Moon, reaching a depth of over 130 feet (40 meters).
Recently released data indicates that the subsurface is essentially made by highly porous granular materials embedding boulders of different sizes.
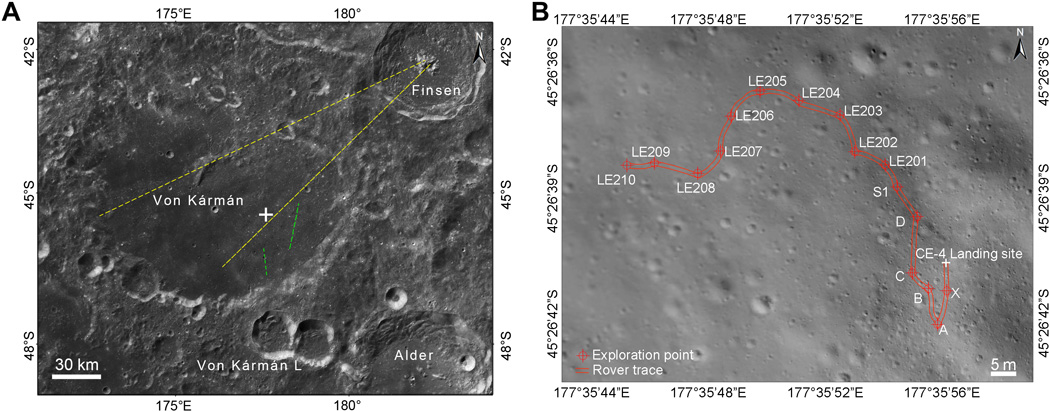
Chang’e-4 mission landed in the eastern floor of Von Kármán crater as indicated by the white cross on a bright ejecta blanket. The yellow and green lines show the ejecta direction from Finsen and Von Kármán L, respectively.
Credit: Chunlai Li, et al.
Sample return

Chang’e 5 lunar sample return capsule has undergone thermal vacuum tests.
Credit: China Aerospace Science and Technology Corporation (CASC).
Next up and out in terms of China’s lunar exploration projects is the launch of the Chang’e-5 lunar probe, weighing about 8.2 tons.
It is expected to be launched in 2020 to rocket lunar samples weighing 4.4 pounds (2 kilograms) back to Earth.
View this CCTV video on the Chang’e-4 mission at:
To read the paper – “The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar” – in Science Advances February 26, 2020, go to:
![]()
The spread of COVID-19/Coronavirus has impacted major upcoming space gatherings.
In a statement from the Space Foundation regarding its 36th Space Symposium to be held March 30th – April 2nd, 2020 at the Broadmoor in Colorado Springs, plans are continuing to move forward but the organization is continually monitoring all of the reporting from the recognized and authoritative sources concerning the virus spread.
“With thousands gathering from the civil, military, commercial and international space communities, the safety, security and success of each and every Symposium attendee, exhibitor, presenter and guest is always priority,” a Space Foundation statement noted.
Safeguard everyone
“We also know that federal, state and local leaders and public health providers are working together and sharing guidance to safeguard everyone from exposure to the virus. The Space Foundation encourages all of its attendees, exhibitors, presenters and guests to continue to follow the prescribed guidance of these authorities as well as the CDC’s healthy habits to prevent cold/flu,” the Space Foundation explains.
“As the 36th Space Symposium approaches, the Space Foundation will be continually working with The Broadmoor, as well as all of our vendors, staff, and volunteers to take appropriate measures to make sure your time with us is safe and successful. When and if additional guidance is provided, we will share further updates as warranted,” the statement adds.

Health and safety
Similarly, the 51st Lunar and Planetary Science Conference (LPSC) that’s being held in the Woodland, Texas March 16–20 has underscored the virus issue.
“As we prepare for the conference, we are confident that this year’s LPSC will be a complete success. However, we want to address how the coronavirus (COVID-19) may impact the conference. The health and safety of all attendees and exhibitors are paramount. The LPSC management team is working closely with the Woodlands Waterway Marriott Hotel and Convention Center to take all feasible precautionary measures that might reduce potential health risks at the conference.”
According to the LPSC statement, the organization continues to follow the guidance of the World Health Organization (WHO) and the Centers for Disease Control (CDC).
“At their websites, you will find regular updates about the virus and information about protective measures you can take. Both organizations advise that washing your hands with soap and water or using alcohol-based hand rub can eliminate the virus if it is on your hands.”
While the LPSC management team noted they are always providing hand sanitizer for its attendees, “we will increase its availability throughout the meeting areas. Both the WHO and CDC also offer information about other healthy and protective practices. We encourage all attendees to visit these websites and remain informed on protective measures.”

Credit: APS
In addition, the 2020 American Physical Society (APS) March 2-6 meeting has been canceled.
“Due to rapidly escalating health concerns relating to the spread of the coronavirus disease (COVID-19), the 2020 APS March Meeting in Denver, CO, has been canceled. Please do not travel to Denver to attend the March Meeting.”
For more information:
WHO: https://www.who.int/emergencies/diseases/novel-coronavirus-2019/advice-for-public

Source images credit: NASA / JPL-Caltech / MSSS
Stitching and retouching: Andrew Bodrov
360video 8K: https://youtu.be/DeeHOQkzGeE
This panorama combines 85 exposures taken by the rover’s Mars Hand Lens Imager (MAHLI) during the Sol 2687 of Curiosity’s work on Mars (February 27, 2020).
NASA’s Curiosity Mars rover is now performing Sol 2690 tasks. Here’s a few of new images from the robot:

Mars Hand Lens Imager photo produced on Sol 2687, February 27, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Front Hazard Avoidance Camera Left B photo taken on Sol 2689, February 29, 2020.
Credit: NASA/JPL-Caltech

Mars Hand Lens Imager photo produced on Sol 2687, February 27, 2020.
Credit: NASA/JPL-Caltech/MSSS

Mars Hand Lens Imager photo produced on Sol 2687, February 27, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Right B Navigation Camera image taken on Sol 2689, February 29, 2020.
Credit: NASA/JPL-Caltech

Mars Hand Lens Imager photo produced on Sol 2687, February 27, 2020.
Credit: NASA/JPL-Caltech/MSSS

Mars Hand Lens Imager photo produced on Sol 2687, February 26, 2020.
Credit: NASA/JPL-Caltech/MSSS

View of a potentially passable route onto the top of the Greenheugh pediment. (Area on the left). Image taken by Left Navigation Camera on Sol 2659, January 29, 2020.
Credit: NASA/JPL-Caltech

Credit: CCTV/Inside Outer Space screen grab
China’s lunar rover Yutu-2, or Jade Rabbit-2, is using its Lunar Penetrating Radar (LPR) to investigate the farside’s underground it roams.
A study conducted by a research team led by Li Chunlai and Su Yan at the National Astronomical Observatories of the Chinese Academy of Sciences (NAOC) using that data reveals what lurks below the lunar surface.
Their work has been published in the latest issue of Science Advances.

China’s champion – long duration Yutu-2 rover.
Credit: CNSA/CLEP
Subsurface stratigraphy
The rover’s LPR sends radio signals deep into the surface of the Moon, reaching a depth of over 130 feet (40 meters) by the high-frequency channel of 500 megahertz (MHz). That penetrating capability is more than three times the depth previously reached by the Chang’e-3 lunar probe – Yutu-1 – that wheeled across the Moon at the end of 2013.

Credit: CCTV/Inside Outer Space screen grab
As reported by China’s Xinhua news group this new data has allowed researchers to develop an image of the subsurface stratigraphy of the farside of the Moon.
“We found that the signal penetration at the Chang’e-4 site is much deeper than that measured by the LPR at the landing site of the Chang’e-3 probe on the near side of the Moon,” said Li Chunlai, a research professor and deputy director-general of NAOC.

Credit: CCTV/Inside Outer Space screen grab
“The subsurface at the Chang’e-4 landing site is very complex, and this qualitative observation suggests a totally different geological context for the two landing sites,” Li said.

Credit: CCTV/Inside Outer Space screen grab
Radar echo
Despite the good quality of the radar image along the rover route at a distance of about 348 feet (106 meters), “the complexity of the spatial distribution and shape of the radar features make identification and interpretation of the geological structures and events that generated such features quite difficult,” said Su Yan, also a researcher from the NAOC.

Credit: CCTV/Inside Outer Space screen grab
“The first layer is a fine 12-meter soil layer below the surface. The second layer between 12 and 24 meters under the ground has a lot of stones and the strongest radar echo. It even forms a stone layer and stacks of loose stones. There are three gravel stacks. The third layer is 24-40 meters under the surface. Radar echo shows its dark and bright parts, so there are granules and scattered stones,” said Su in a China Central Television (CCTV) interview.

Credit: CCTV/Inside Outer Space screen grab
The content is likely the result of a turbulent early solar system, when meteors and other space debris frequently struck the Moon. The impact site would eject material to other areas, creating a cratered surface atop a subsurface with varying layers, said Li in the CCTV interview.
Many layers
“We find the ejecta have many layers and each layer is different from each other. It may mean the place has lots of ejecta from impact sites, so history of meteorite impacts here is very complicated. It also shows the Moon was frequently struck by small celestial bodies, and debris will be ejected to bottom of the Von Kármán crater. The ejecta have recorded history of meteorite impact on the Moon,” Li said.

Von Kármán Crater as viewed by the NASA Lunar Reconnaissance Orbiter Camera, or LROC.
Credit: NASA/GSFC/Arizona State University
As the Yutu-2 rover has walked about 985 feet (300 meters), Li said his team expects new discovery in the future.
“We hope it can walk out of the ejecta-covered area. If it can enter a basalt zone, maybe we can better understand distribution and structure of ejecta from meteorite impacts. The distance may be 1.8 kilometers. I think it may take another one year for the rover to walk out of the ejecta-covered area,” Li said.

NASA’s Lunar Reconnaissance Orbiter (LRO) captured China’s Chang’e-4 farside lander/rover.
Image shows lander (near tip of left arrow) and rover (near tip of right arrow) nestled among craters on the floor of Von Kármán crater.
Credit: NASA/GSFC/Arizona State University
Tomographic technique
The scientists analyzed the radar image with tomographic technique, and the result shows that the subsurface is essentially made by highly porous granular materials embedding boulders of different sizes.
China’s Chang’e-4 mission – a lander/rover — made the first-ever soft landing on the eastern floor of the Von Kármán crater within the South Pole-Aitken Basin on the farside of the Moon on January 3, 2019.
Go to this CCTV video at:
Also, a similar video with different content at:

