Author Archive

Credit: ISEC
A just-released study underscores the promising outcome from establishing a “Galactic Harbour” anchored in developing space elevator technology.
The International Space Elevator Consortium (ISEC) has issued “Space Elevators are the Transportation Story of the 21st Century – A Primer for Progress in Space Elevator Development.”

Credit: ISEC
New paradigm
The study suggests that a new paradigm has emerged, reinforced by some key viewpoints:
— Space elevators can be accomplished because we now have a material
— Space elevators enable interplanetary missions
— Fast transit to Mars (as short as 61 days)
— Space elevators can move massive amounts of cargo (180,000 MTs/year to GEO-beyond)
— Space Elevators are Earth friendly; no rocket exhaust to contribute to global warming and no additional space debris
Credit: Obayashi Corporation of Tokyo, Japan
Appropriate architecture
“Two of our messages are pretty straightforward,” explains Peter Swan, President of ISEC. “The Space Elevator will change the way we do interplanetary (and GEO for missions such as Space Solar Power). The future needs an appropriate architecture for space access, containing two major components – Space Elevator permanent transportation infrastructure and rocket portals.”
Some conclusions from the ISEC appraisal are stimulating.

Courtesy: Sky Line
For one, the Space Elevator is closer than you think, reports the ISEC. Galactic Harbours will enable robust missions to Moon and Mars. Also, only Space Elevators can deliver the requirements of logistics equipment and supplies to the Moon and Mars. Indeed, Colonization on Mars cannot happen without the logistics support of Space Elevators, the group explains.
For more information on the International Space Elevator Consortium (ISEC) and its reports, go to:
https://www.isec.org/studies/#TransportStory
These reports are available at no cost. Hardcopy versions are available for purchase at Lulu.com.

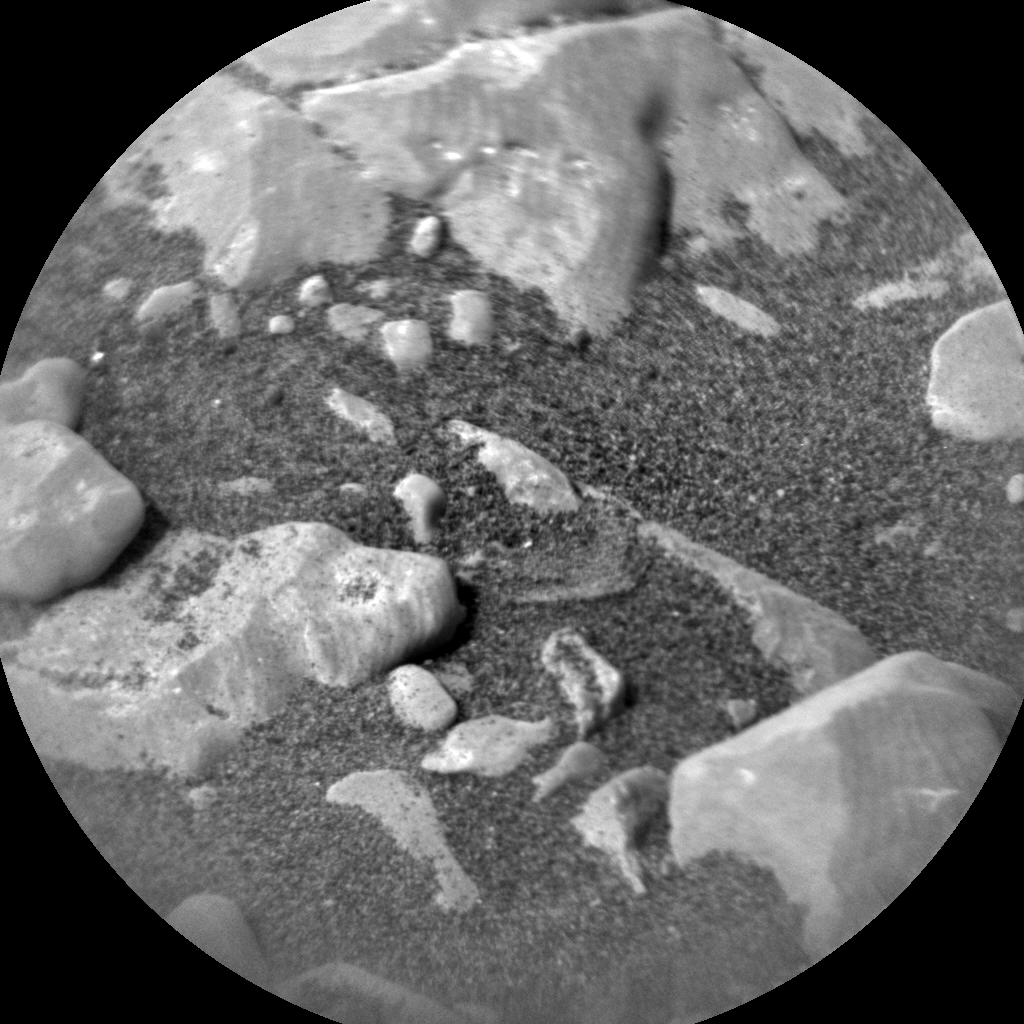
Curiosity Mars Hand Lens Imager photo taken on Sol 2822, July 14, 2020.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now conducting Sol 2822 duties.
The rover continues to drive towards a next potential drill location, the first planned pit stop on its summer road trip, reports Mariah Baker, a planetary geologist at the Center for Earth & Planetary Studies, Smithsonian National Air & Space Museum in Washington, D.C.
By the time Curiosity arrives at the designated drill area, the robot will have travelled over 14 miles (23 kilometers) since landing on Mars in August 2012.

Curiosity Mars Hand Lens Imager photo taken on Sol 2822, July 14, 2020.
Credit: NASA/JPL-Caltech/MSSS
Jagged rocks
“But driving across the rocky Martian surface isn’t always easy; sharp obstacles and jagged rocks have caused some minor damage to the rover’s wheels over the years,” notes Baker.
In order to check on the condition of the wheels and track their degradation over time, the team periodically images them with the Mars Hand Lens Imager (MAHLI) camera. “As it happens, we are due for a new set of wheel images, so today’s “drive” is a bit unique: the rover will only travel a little over a meter, just enough to image one full rotation of the wheels.”

Curiosity Mars Hand Lens Imager photo taken on Sol 2822, July 14, 2020.
Credit: NASA/JPL-Caltech/MSSS
Bedrock targets
Before this unusually short drive, Curiosity is slated to acquire data on the local geology; bedrock targets “Cateran Trail” and “Cowal Way” will be targeted with the Chemistry and Camera (ChemCam) instrument and imaged with Mastcam for documentation purposes.
Mastcam will also capture stereo mosaics of nearby features of interest named “Fife Coastal Path” (a rock fracture) and “Glenfinnan Viaduct” (tilted rocks).
Baker adds that the robot’s Navcam will also be used to image sediment that has accumulated on the rover deck.

Curiosity Mars Hand Lens Imager photo taken on Sol 2822, July 14, 2020.
Credit: NASA/JPL-Caltech/MSSS
Strategic path
After the wheel imaging, standard post-drive images will be acquired with Hazcam, Navcam, and Mastcam. There will also be two ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) observations and two larger Mastcam mosaics, one of the rover’s target drill area and one of a more distant geologic contact.
Lastly, three observations (two with Navcam and one with Mastcam) will be used to monitor dust activity in Gale crater.
“Although our wheels have suffered some damage over the years, they’re still very capable of taking us where we need to go and we continue to make good progress on our strategic path,” Baker concludes. “We expect to arrive at our designated drill location by the weekend, and we will be back on the road once our drill is complete!”

Credit: Wan, W.X., Wang, C., Li, C.L. et al.
China’s Tianwen-1 Mars spacecraft appears slated for a July 23 launch date (the opening of the launch window).
The Mars probe has been transported to Wenchang Satellite Launch Center on Hainan Island. It is set to be launched atop a Long March 5 carrier rocket in the coming days, with arrival at Mars seven months later.
The mission will study the Red Planet with a combination of orbiter and lander/rover.

China’s Mars landing regions.
Courtesy: James Head
Candidate landing site: Utopia Planitia
In a just published Nature Astronomy paper — “China’s first mission to Mars” – details about the mission are outlined, among them:
The Tianwen-1 probe has a mass (including fuel) of about 5 tons.

China’s Mars orbiter, lander, rover effort.
Credit: China Aerospace Technology Corporation
The orbiter will provide a relay communication link to the rover, while performing its own scientific observations for one Martian year. The orbit during the scientific observation stage is a polar elliptical orbit 165 miles x 746 miles (265 km × 12,000 kilometers).
The Tianwen-1 probe is expected to reach Mars around February 2021 and the scientific observation phase will start in April 2021.

Viking 2 Image of Mars Utopian Plain.
Credit: NASA/JPL-CalTech
The lander/rover will perform a soft landing on the Martian surface some 2–3 months after arrival of the spacecraft, with a candidate landing site in Utopia Planitia. It is the Martian region where the NASA Viking 2 lander touched down on September 3, 1976.
Scientific instruments
The roughly 530 pound (240 kilograms) solar-powered rover is nearly twice the mass of China’s Yutu lunar rovers, and is expected to be in operation for about 90 Martian days.
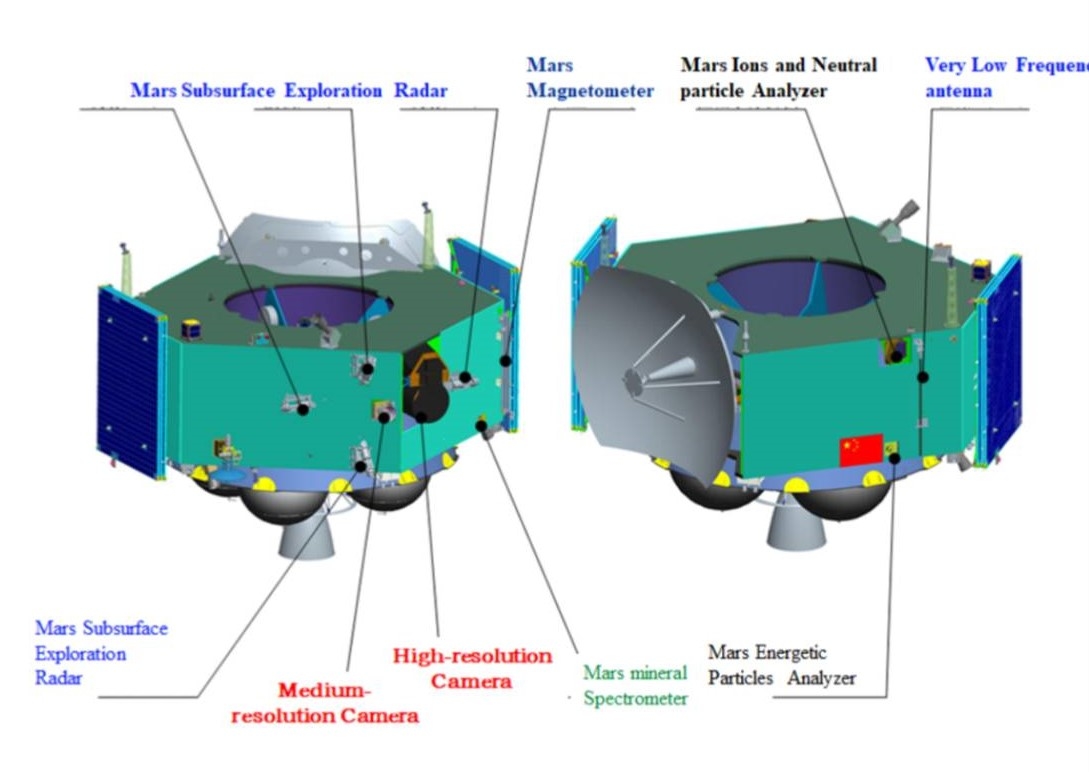
China’s Mars orbiter.
Courtesy: James Head
There are 13 scientific payloads in the Tianwen-1 mission in total.
The seven instruments on board the orbiter comprise two cameras, the Mars-Orbiting Subsurface Exploration Radar, Mars Mineralogy Spectrometer, Mars Magnetometer, Mars Ion and Neutral Particle Analyzer, and Mars Energetic Particle Analyzer.
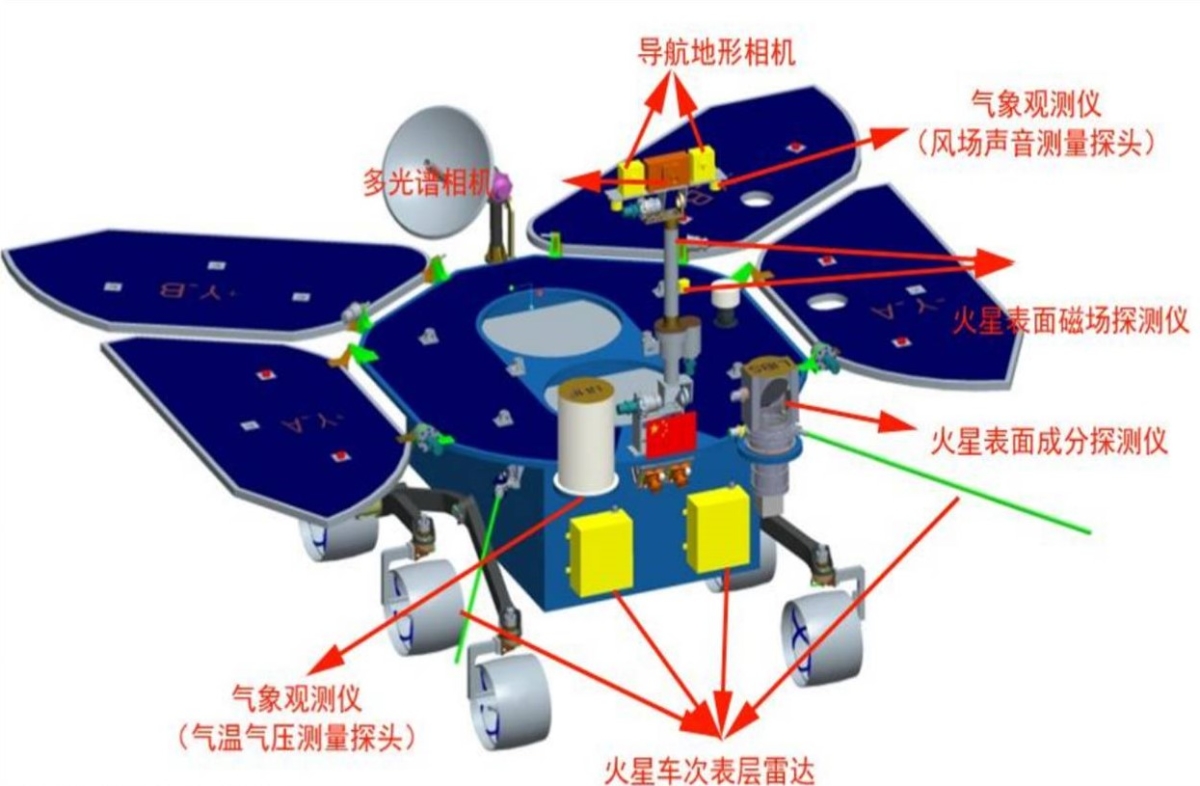
China’s Mars rover.
Courtesy: James Head
The six instruments installed on the rover comprise the Multispectral Camera, Terrain Camera, Mars-Rover Subsurface Exploration Radar, Mars Surface Composition Detector, Mars Magnetic Field Detector, and Mars Meteorology Monitor.
Comprehensive mission

China’s Mars mission elements.
Credit: CCTV/Inside Outer Space screengrab
According to the paper’s authors, “Tianwen-1 is going to orbit, land and release a rover all on the very first try, and coordinate observations with an orbiter. No planetary missions have ever been implemented in this way. If successful, it would signify a major technical breakthrough. Scientifically, Tianwen-1 is the most comprehensive mission to investigate the Martian morphology, geology, mineralogy, space environment, and soil and water-ice distribution.”
To read the full Nature Astronomy paper — China’s first mission to Mars – go to:
NASA’s Curiosity Mars rover is now performing Sol 2822 duties.
Here are some newly relayed images from the robot:

Curiosity Right B Navigation Camera image taken on Sol 2821, July 13, 2020.
Credit: NASA/JPL-Caltech

Curiosity Right B Navigation Camera image taken on Sol 2821, July 13, 2020.
Credit: NASA/JPL-Caltech

Curiosity Right B Navigation Camera image taken on Sol 2821, July 13, 2020.
Credit: NASA/JPL-Caltech

Curiosity Front Hazard Avoidance Camera Right B photo acquired on Sol 2821, July 13, 2020.
Credit: NASA/JPL-Caltech

Curiosity Chemistry & Camera Remote Micro-Imager (RMI) photo taken on Sol 2821, July 13, 2020.
Credit: NASA/JPL-Caltech/LANL

Curiosity Mast Camera Right image taken on Sol 2820, July 12, 2020.
Credit: NASA/JPL-Caltech/MSSS

Credit: NASA/JPL-Caltech/Univ. of Arizona
Road map
This map shows the route driven by NASA’s Mars rover Curiosity through the 2816 Martian day, or sol, of the rover’s mission on Mars (July 8, 2020).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2813 to Sol 2816, Curiosity had driven a straight line distance of about 139.21 feet (42.43 meters), bringing the rover’s total odometry for the mission to 14.18 miles (22.83 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
I can see clearly now…there’s dust on Mars!

Image Credit: NASA/JPL-Caltech
Comparative images from NASA’s InSight Mars lander from Sol 10 to Sol 578 show that the spacecraft is quite dusty.
Robotic arm-mounted, Instrument Deployment Camera (IDC) images taken on December 7, 2018, Sol 10 and recent July 12, 2020, Sol 578 photos reveal the coating of Mars dust.
InSight landed on the Red Planet on November 26, 2018.

Image Credit: NASA/JPL-Caltech
Power decrease
“They do look dusty, don’t they! It was a little jolting to see the new images, although I shouldn’t really have been surprised,” said Bruce Banerdt, Principal Investigator for the InSight Mission to Mars at Jet Propulsion Laboratory.
“We have been monitoring the output from the arrays continuously since the beginning of the mission, and the power decrease has been pretty consistent with our model predictions,” Banerdt told Inside Outer Space.”

InSight’s first full selfie on Mars comprised of 11 photos stitched together to make this mosaic, created on December 6, 2018 (Sol 10).
Credit: NASA/JPL-Caltech
Cleaning event?
Banerdt said the InSight team is always hoping for a cleaning event, as was the experience on numerous occasions by earlier Mars rovers, Spirit and Opportunity, but so far InSight has not experienced one.
“Even so, we have a pretty hefty energy survival margin with the current array conditions,” Banerdt added.
“Our models of dust accumulation predict that we can easily last through our prime mission, and should be able to last through at least an additional Mars year under a normal range of weather conditions, although we have tighter and tighter energy margins as the arrays get less efficient due to dust coverage,” Banerdt said.
Yuanwang-6 tracking ship.
Credit: PLAN
China’s space tracking ship Yuanwang-6 has set sail on multiple spacecraft monitoring missions.
The Xinhua news agency reports that Yuanwang-6 will carry out missions in the Pacific Ocean, the Indian Ocean and the Atlantic Ocean – the first time for a Yuanwang ship to perform missions in the three oceans during a single voyage.
The ship has completed an overhaul, maritime calibration tests, equipment precision appraisals and two satellite maritime monitoring missions this year.
China’s Mars orbiter, lander, rover effort.
Credit: China Aerospace Technology Corporation
Mars mission
It is likely this ship will be in position for duties associated with China’s Tianwen-1 Mars mission that constitutes an orbiter, lander, and rover.
China’s Mars mission elements.
Credit: CCTV/Inside Outer Space screengrab
China plans to launch its first Mars probe between July 20 and 25, according to the China Global Television Network (CGTN).
To reach Mars in 2021, the spacecraft will be lofted by a Long March 5 Y4 carrier rocket.
China’s Mars landing regions.
Courtesy: James Head
Regarding the selection of China’s robotic Mars landing site, two regions have been identified that represent a wide array of scientific sleuthing, including appraising possible habitats of life.
The lander/rover will perform a soft landing on the Martian surface some 2–3 months after arrival of the spacecraft, with a candidate landing site in Utopia Planitia.

Space is Open for Business – The Industry That Can Transform Humanity by Robert C. Jacobson; Self-published, Release Date: July 2020; Available by pre-order.
The space industry is experiencing a renaissance, led by private companies who have pushed the boundaries and continue innovating at a rapid pace, explains space investor and entrepreneur, Robert C. Jacobson.
The author underscores the fact that we are “in the middle of a critical turning point: the NewSpace revolution needs public interest, increased investment, improved government policy, and widespread collaboration to propel forward and reach its full potential.”
Divided into seven parts, the reader will enjoy Jacobson’s thoughtful guide to the evolving space industry, such as “Investing in the Cosmos,” “Joining the Movement,” and “The Blueprint of Evolution.” The book offers insightful looks at many of the space entrepreneurs of today that are indeed shaping NewSpace.
“Space is, in fact, a culmination of many disciplines, and it works in tandem with various industries,” the author explains. “The sector’s growth depends on merging different fields with cutting-edge technologies, fantastical ideas with logical applications.”
I found this volume an uplifting read. In addition, Jacobson offers a “non-exhaustive list” of the immediate, necessary changes needed to propel NewSpace forward and achieve its unlimited potential. Culled together are a series of key steps to do so.
“Smart policy, technology and innovation adoption, increased space-entrepreneurship, and timing will all affect the industry’s trajectory,” writes Jacobson.
Space is the unlimited business plan, the author believes. Space can transform the world in ways not possible by the bounds of terrestrial business endeavors. If you can dream it, it may be possible in this space-future.
The book concludes with a comprehensive set of references that adds to this book’s unique contribution to the evolving and expansive world of NewSpace.
For more information on Space is Open for Business – The Industry That Can Transform Humanity go to:

Curiosity Left Navigation Camera image acquired on Sol 2817, July 9, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now carrying out Sol 2819 tasks.
Last Wednesday, Curiosity successfully drove a whopping 336 feet (102.5 meters) over 159 minutes, reports Abigail Fraeman, a planetary geologist at NASA’s Jet Propulsion Laboratory.
Curiosity Chemistry & Camera image taken on Sol 2818, July 10, 2020.
Credit: NASA/JPL-Caltech/LANL
“This isn’t the longest drive Curiosity’s ever completed (the record is 142.5 meters on sol 665), but it did set a record for the longest drive ever planned from our quarantined dining room tables and couches,” Fraeman adds.

Curiosity Mast Camera Left image taken on Sol 2817, July 9, 2020.
Credit: NASA/JPL-Caltech/MSSS
Great progress
“We’re making great progress on our summer road trip towards the sulfate unit, and are getting very close to our first ‘rest stop.’ While I have fond memories of pulling over at the Delaware House during my many trips up and down the east coast of the U.S. as a child, Curiosity’s rest stop will be a location in the clay unit that we might decide to drill in order to collect one last clay-rich sample we leave the area,” Fraeman explains.
Curiosity Front Hazard Avoidance Camera Left B photo acquired on Sol 2818, July 10, 2020.
Credit: NASA/JPL-Caltech
A new plan calls for the robot to drive another roughly 105 feet (32 meters) on the second sol of the weekend’s plan.
Pebbly workspace
Before that, Curiosity will collect Chemistry and Camera (ChemCam) observations on targets named “Reivers Route,” “Moray Coastal Trail,” and “West Highland Way,” and take some Mastcam mosaics.

Curiosity Mast Camera Right image taken on Sol 2817, July 9, 2020.
Credit: NASA/JPL-Caltech/MSSS
Also on the plan is use of the Alpha Particle X-Ray Spectrometer (APXS) and Mars Hand Lens Imager (MAHLI) data from a target named “Kintyre Way,” which is one of the larger rocks in the pebbly workspace in front of the rover.

Curiosity Mast Camera Left image taken on Sol 2817, July 9, 2020.
Credit: NASA/JPL-Caltech/MSSS
Lastly, Curiosity will collect the usual suite of observations to measure the environmental conditions, Fraeman concludes, and image the ChemCam calibration targets after the drive on the third sol of the weekend plan, Sols 2819-2821.

Credit: CCTV/Inside Outer Space screengrab
Advanced digital technologies, such as AR (augmented reality) VR (virtual reality), are being used in spacecraft design, development and manufacturing at the China Aerospace Science and Technology Corporation (CASC), Beijing, China.

Credit: CCTV/Inside Outer Space screengrab
For example, about 90 percent of the cables on China’s new crewed spacecraft prototype were put in with the help of AR technology.

Credit: CCTV/Inside Outer Space screengrab
“In the past, it might have taken an engineer half a day to lay a cable, now we can do the job in half an hour,” explains Yi Wangmin, chief engineer, CASC.
Video: China Central Television (CCTV)
Go to video at:

After more than a year in a clay-rich region, Curiosity is making a mile-long journey around some deep sand so that it can explore higher up Mount Sharp.
Stitched together from 28 images, NASA’s Curiosity Mars rover captured this view from “Greenheugh Pediment” on April 9, 2020, the 2,729th Martian day, or sol, of the mission. In the foreground is the pediment’s sandstone cap. At center is the “clay-bearing unit”; the floor of Gale Crater is in the distance.
Credit: NASA/JPL-Caltech/MSSS

Mast Camera image on Sol 2813 shows the view looking downhill across the clay unit, with Vera Rubin ridge” (VRR) in the background.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2817 duties.
“Curiosity is going downhill,” reports Roger Wiens, a geochemist at Los Alamos National Laboratory in New Mexico. “Not in the figurative sense—Curiosity’s 10 instruments all still work well, its six wheels are all doing well, and the drill has been working great for the last two years as well as earlier in the mission.”
Wiens adds that the rover’s power output is somewhat lower than when it started but, all in all, Curiosity is doing great.
Lower elevation
“No, Curiosity is just heading to a slightly lower elevation, to look for a location to potentially drill at least one more sample in the clay unit,” Wiens says. “Clay beds tend to signal habitable environments where water was present for a long time and they also tend to be good at preserving organic materials.”

Curiosity Front Hazard Avoidance Camera Right B image taken on Sol 2815, July 7, 2020.
Credit: NASA/JPL-Caltech
The drive is part of the robot’s “summer road trip” towards the sulfate unit, and will allow the team to potentially get another sample of the clay-rich region while Curiosity still has the opportunity.

Curiosity Mast Camera Left photo taken on Sol 2813, July 5, 2020.
Credit: NASA/JPL-Caltech/MSSS
Downhill drives
“Because Curiosity’s route has generally ascended Mt. Sharp, downhill drives of this magnitude have been rare,” Wiens explains. A little over two years ago Curiosity drove back down the front (north) side of “Vera Rubin ridge” (VRR) to pick up a drill sample of the “Blunts Point” member of the “Murray formation.”
“Early in 2019, Curiosity drove down the back (south) side of VRR into the clay unit, which is a slight depression in the side of Mt. Sharp,” Wiens adds. “And more recently, Curiosity has driven down from some buttes and down from a short excursion on “Greenheugh Pediment.” Other than that, Curiosity has been climbing most of the time.”
In the last several sols, the rover has already descended over 50 feet (16 meters) in elevation from its earlier perch on “Bloodstone Hill.”

Curiosity Mast Camera Left photo taken on Sol 2813, July 5, 2020.
Credit: NASA/JPL-Caltech/MSSS
Uplinked plan
In a recent uplink plan Curiosity will do several observations at its current location, then do a relatively long drive on the second sol, followed by additional observation activities, Wiens points out.
The rover’s Chemistry and Camera (ChemCam) and Mastcam will make observations of bedrock targets “Caldback” (rubbly textured) and “Portencross” (smooth).
Mastcam will also take stereo images of pebbles and of “Windy Gyle,” an outcrop to the east.
Terrain imaging
Curiosity will then take its drive — hoping to go a distance of over 328 feet (100 meters) — combining an initial drive on terrain scientists can see with autonomous driving in the later part on terrain that has not yet been imaged.
The drive will be followed by a Sun tau observation by Mastcam and by post-drive image documentation. The rover’s Mars Descent Imager (MARDI) will take an image of the ground at twilight.

Curiosity Mast Camera Left photo taken on Sol 2813, July 5, 2020.
Credit: NASA/JPL-Caltech/MSSS
Suprahorizon movie
On the second sol, Wiens reports, ChemCam is slated to make a passive observation of the sky to measure its dust and water-vapor content, and will make an observation of a bedrock target selected autonomously by the rover.
Radiation Assessment Detector (RAD), the Dynamic Albedo of Neutrons (DAN) and the Rover Environmental Monitoring Station (REMS) will continue taking data.
Also scheduled is use of Navcam to take a suprahorizon movie, and Mastcam will take another Sun tau measurement to check atmospheric dust, Wiens concludes.

