Archive for June, 2020

NASA cover artwork credit: Alberto Bertolin/Jacobs Technology Inc.
After LM – NASA Lunar Lander Concepts Beyond Apollo, John Connolly (Editor) 2019; 277-pages, Free NASA PDF.
This NASA-published volume traces the history of human lunar lander concepts developed since Apollo’s Lunar Module (LM).
Credit NASA
Editor John Connolly has spent 33 years at NASA, primarily leading development of lunar surface systems, including landers. Given the details provided in this book, his bookshelves are surely bowed by the number of study volumes he has collected and gone through!
This notable volume tells the story of physics, technology, and the desire to return humans to the lunar surface through technical descriptions, imagery and looks at subsystems of more than 100 lunar lander concepts created by NASA and its contractors since the Apollo program.

The concepts are grouped by the human exploration timelines that defined the post-Apollo period, starting post-Apollo and continuing through the Space Exploration Initiative and the Vision for Space Exploration, and concluding with the many lander designs created to support NASA’s Constellation program.
Readers will better appreciate the common “trades” that are explored in crewed landing systems, including propellant types, pressurized volumes, structural mass fractions, mass margins, crew size, and special accommodations for ergonomics and other human factors.
“There is a reason why the Apollo LMs, and many of the subsequent lunar lander designs featured in this book, look the way they do – their shape and form is a response to the simple physics that governs the tasks they are asked to perform,” Connolly explains.
As this document was being compiled in 2019, NASA has once again begun planning a return to the Moon, and new lunar lander designs are being generated.
Compared to Apollo, Connolly notes, crews are projected to be larger and stay times longer.
“However, it is expected that the landers will look much like the designs in this document,” he adds, because lunar lander design is a response to the simple physics that governs the tasks they are asked to perform.

Lander Design Analysis Cycle-4
Credit: NASA
“Design is also a living thing. New crewed lander designs will continue to emerge up until the point that humans return to the Moon, and even beyond, Connolly writes. “New players from different countries and commercial providers will create new designs based on new technologies and new requirements.”
“Until some breakthrough technology or new physics principle is created, each lander will respond to the current physics of lunar landing,” Connolly explains in the concluding pages of the volume.
“There may come a time, generations from now, when future engineers are paging through a digital copy of this catalog and reflecting on the early work of lunar lander designers. “Those Apollo guys were really smart, given that they started with nothing as a reference. The Lunar Module – now THAT was a great lunar lander design.”
After LM – NASA Lunar Lander Concepts Beyond Apollo is free to the public and available for download at:
https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20190031985.pdf

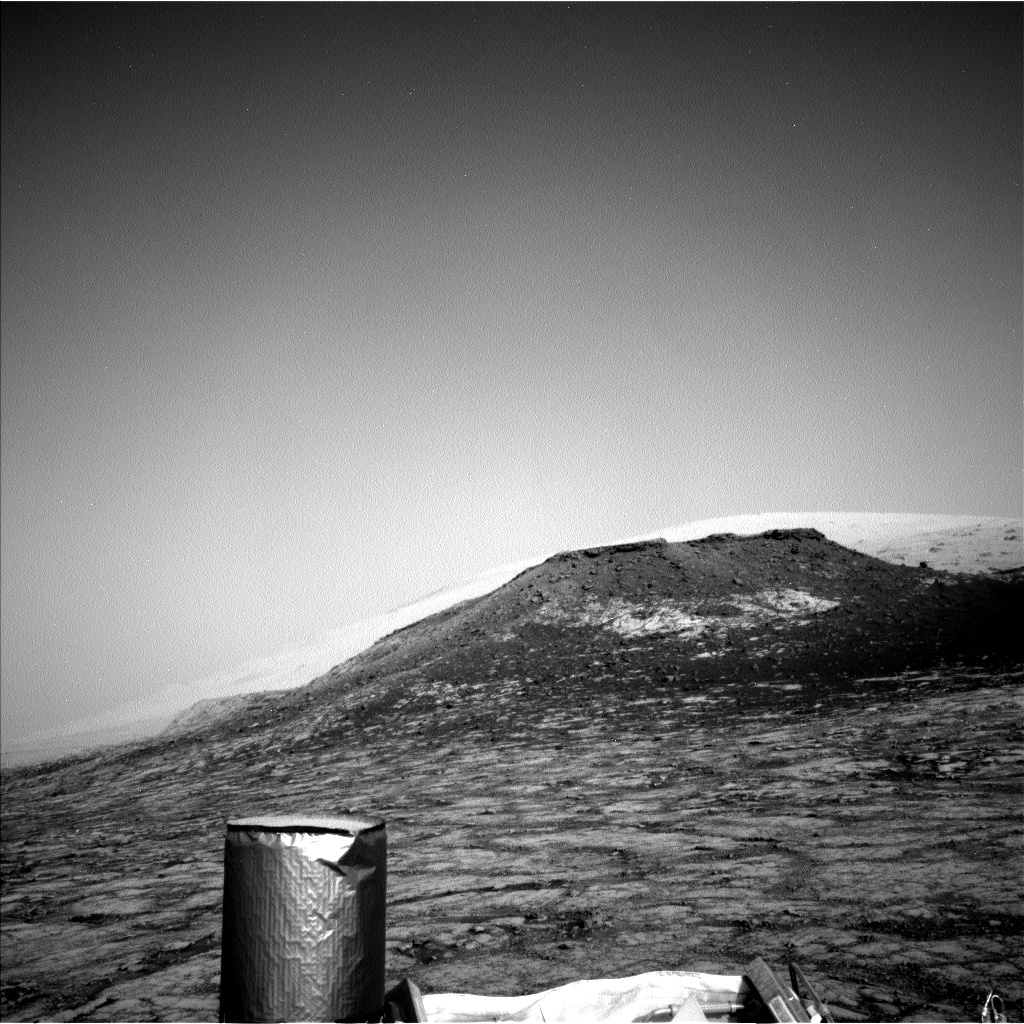
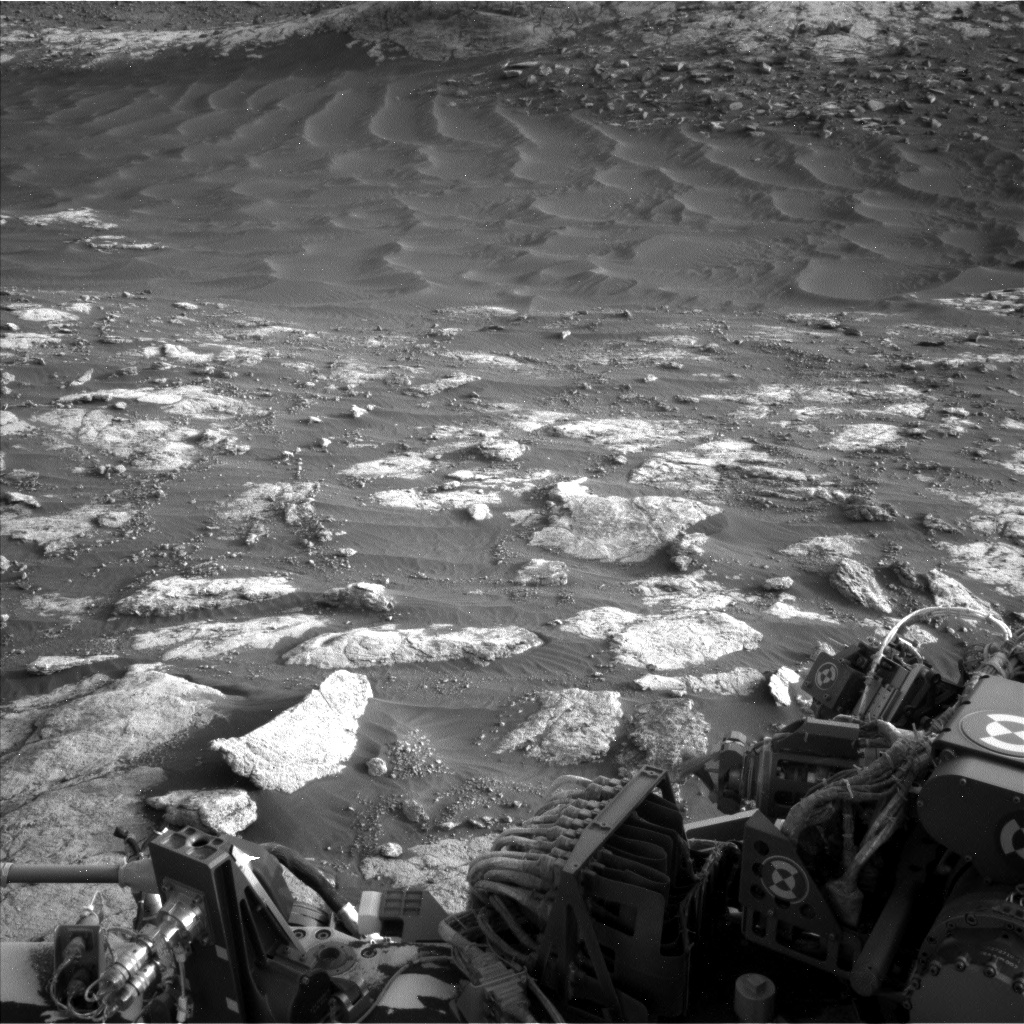
Curiosity Left B Navigation Camera image taken on Sol 2787, June 8, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now carrying out Sol 2788 duties.

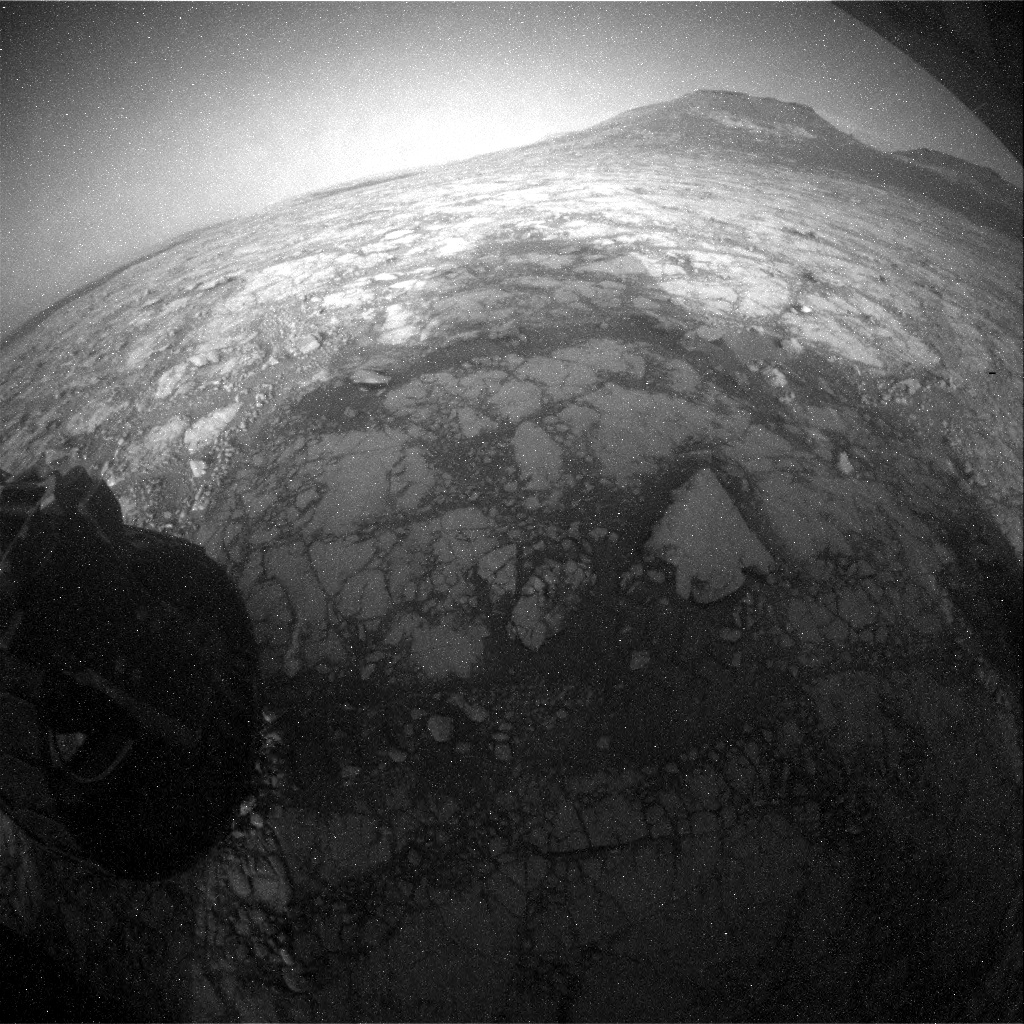
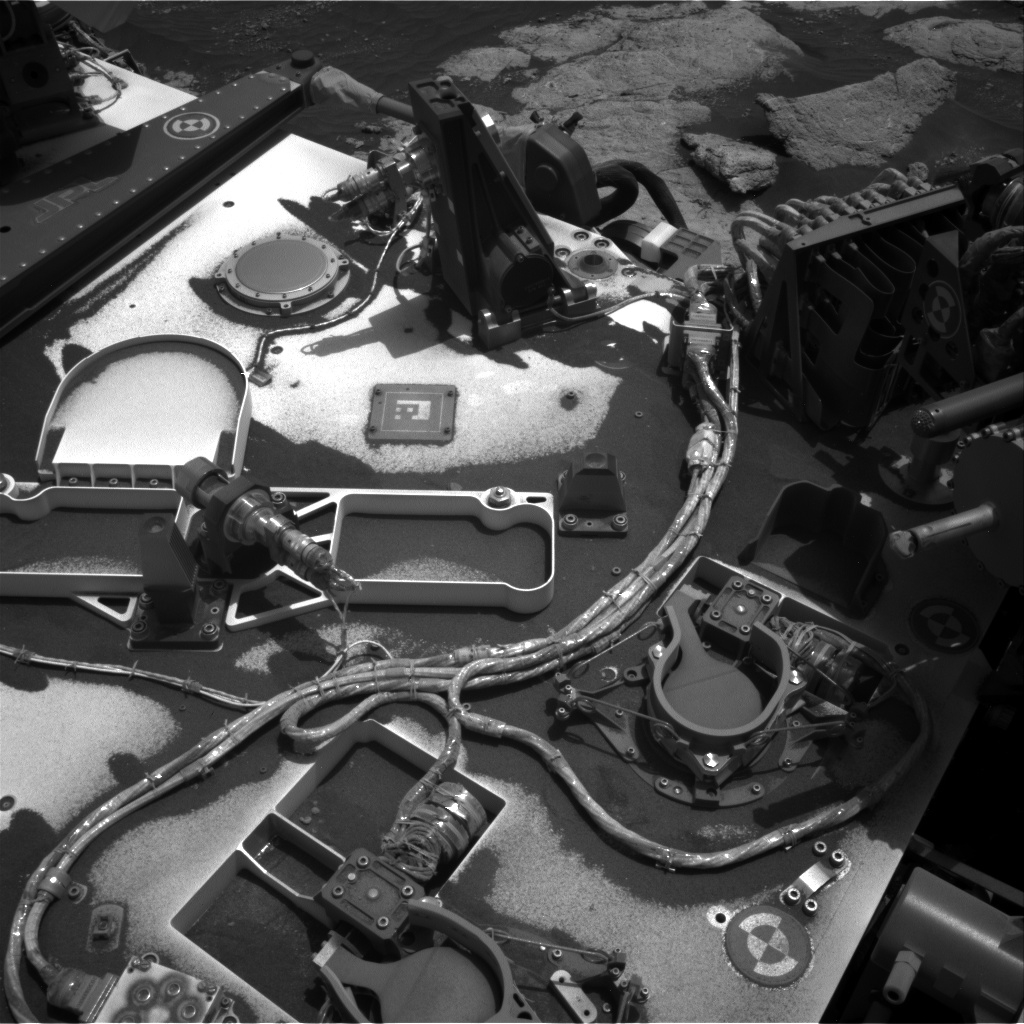
Curiosity Front Hazard Avoidance Camera Right B photo acquired on Sol 2787, June 8, 2020.
Credit: NASA/JPL-Caltech
Mars researchers are evaluating where best Curiosity should next wheel, reports Lucy Thompson, a planetary geologist at University of New Brunswick; Fredericton, New Brunswick, Canada.
Recent deliberations involved where to drive in order to maximize the view out of the front window to make planning the next drive easier, Thompson explains.

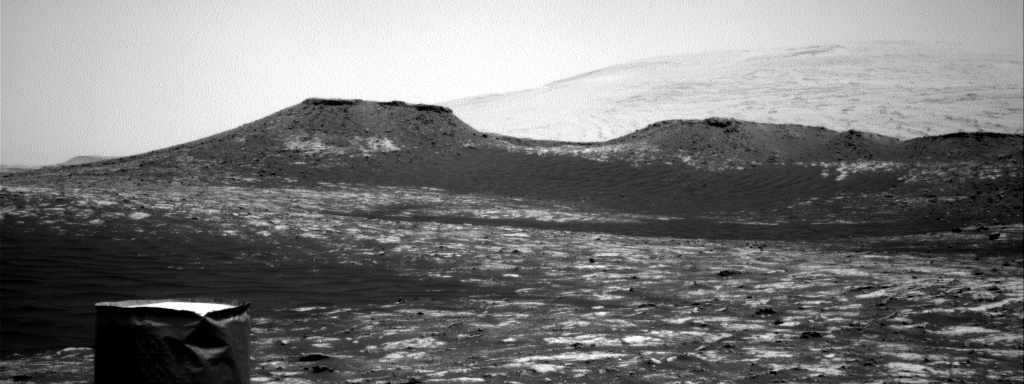
Curiosity Mast Camera Right image taken on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Right image taken on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech/MSSS
Also, trying to place Curiosity in a position where researchers will be able to image an interesting feature that from orbit “appears as though it may be a landslide that originated from the edge of the pediment cliff to the north,” Thompson adds.
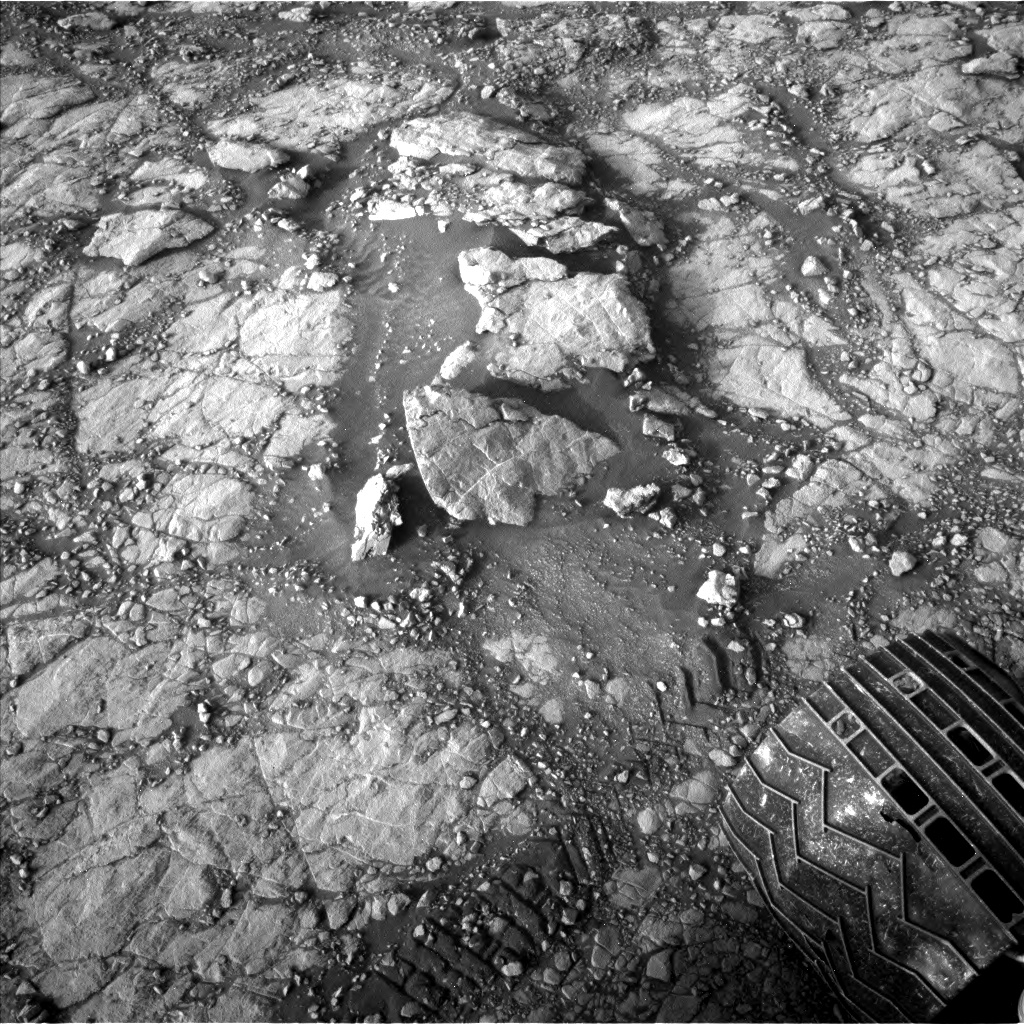
Bedrock transition to pebbles
Discussions also centered on which of the features in the robot’s immediate workspace to analyze with the Chemistry and Camera (ChemCam) instrument: bedrock, diagenetic features (the physical and chemical changes occurring in sediments between the times of deposition and solidification), pebbles or veins?
Curiosity Chemistry & Camera image acquired on Sol 2787, June 8, 2020.
Credit: NASA/JPL-Caltech/LANL
“The rover planner engineers managed to plan a drive that satisfied both mobility goals, and after much deliberation, the science team decided to use ChemCam to investigate the chemistry of the bedrock and a pebble in the workspace, all in one observation (‘Outer Golden Pot’),” Thompson notes.
The Laser Induced Breakdown Spectroscopy (LIBS) raster will transition from bedrock onto a dark grey pebble.
Dark-colored coatings
“I had noticed some blocks with interesting dark-colored coatings in our drive direction imaging last Friday,” Thompson says, and one such block recently ended up just off to the right of the rover.

Navcam left image of the area to the right of the rover with the “Dunkeld” rock target in the middle of the image (slightly darker, triangular shaped rock).
Taken on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech
“Although we will not get chemistry on this block (“Dunkeld”), Mastcam will image the block, and lighter-colored veins and fractured rock around it to get a higher-resolution look,” Thompson reports.
The rover’s Mastcam will also capture the ChemCam target in more detail, as well as mosaics of the possible landslide feature (“Munlochy”), the pediment cliff off to the right (north) of the rover, and a 15 x 8 frame, 360° mosaic, Thompson adds.

Lucy Thompson, a planetary geologist at University of New Brunswick; Fredericton, New Brunswick, Canada.
Dust devil surveys
The environmental science group planned a suite of activities including three large Navcam dust devil surveys, a Navcam dust devil movie, and Navcam deck monitoring.
The standard Rover Environmental Monitoring Station (REMS), Dynamic Albedo of Neutrons passive (DAN) and Radiation Assessment Detector (RAD) activities are also included.
Also planned is a Sample Analysis at Mars (SAM) Instrument Suite Electrical Baseline Test (EBT) designed to monitor SAM’s electrical functions will execute during the overnight.
Thompson notes that she did analyze the data downlinked from weekend observations looking at the typical bedrock chemistry (“Heather Island”) and helped identify the “Dunkeld” target. “It is always a thrill to see the new view after a drive, and today did not disappoint.”

NASA’s Origins, Spectral Interpretation, Resource Identification, Security-Regolith Explorer (OSIRIS-REx) spacecraft.
Credit: NASA/Goddard/University of Arizona
NASA’s OSIRIS-REx spacecraft has been making close-up observations of asteroid Bennu. Those images contain the first evidence of thermal fracturing of rocks on an airless body.
Thermal fracturing or thermal stress weathering occurs as rocks heat and cool each day, and mechanical stresses build up that can cause cracks to develop and grow. Over time the cracks grow larger and cause the rock to disaggregate or split into multiple pieces.
Planetary Science Institute (PSI) research scientist Jamie Molaro explains: “This is the first time evidence for thermal fracturing has been definitively observed on an object without an atmosphere.”

NASA’s OSIRIS-REx Finds Heat, Cold Fracturing Rocks on Asteroid Bennu
Examples of disaggregation (top) and linear fractures (bottom) in boulders of varying sizes on Bennu.
Credit: NASA/Goddard/University of Arizona
The research findings have been published in a Nature Communications paper.
Piece of a puzzle
“Like any weathering process, thermal fracturing can cause the evolution of boulders and planetary surfaces over time; from changing the shape and size of individual boulders, to producing pebbles or fine-grained regolith, to breaking down crater walls,” Molaro said in a PSI statement.
“How quickly this occurs relative to other weathering processes tells us how quickly the surface has changed. It is one piece of a puzzle that tells us what the planetary surface used to be like, and what it will be like millions of years from now,” Molaro explains. “We don’t have good constraints yet on breakdown rates from thermal fracturing, but we can get them now that we can actually observe evidence for it for the first time in-situ.”
The Planetary Science Institute is headquartered in Tucson, Arizona.
PSI’s Molaro is lead author of the paper “In situ evidence of thermally induced rock breakdown widespread on Bennu’s surface” published June 9, 2020 and can be found at:
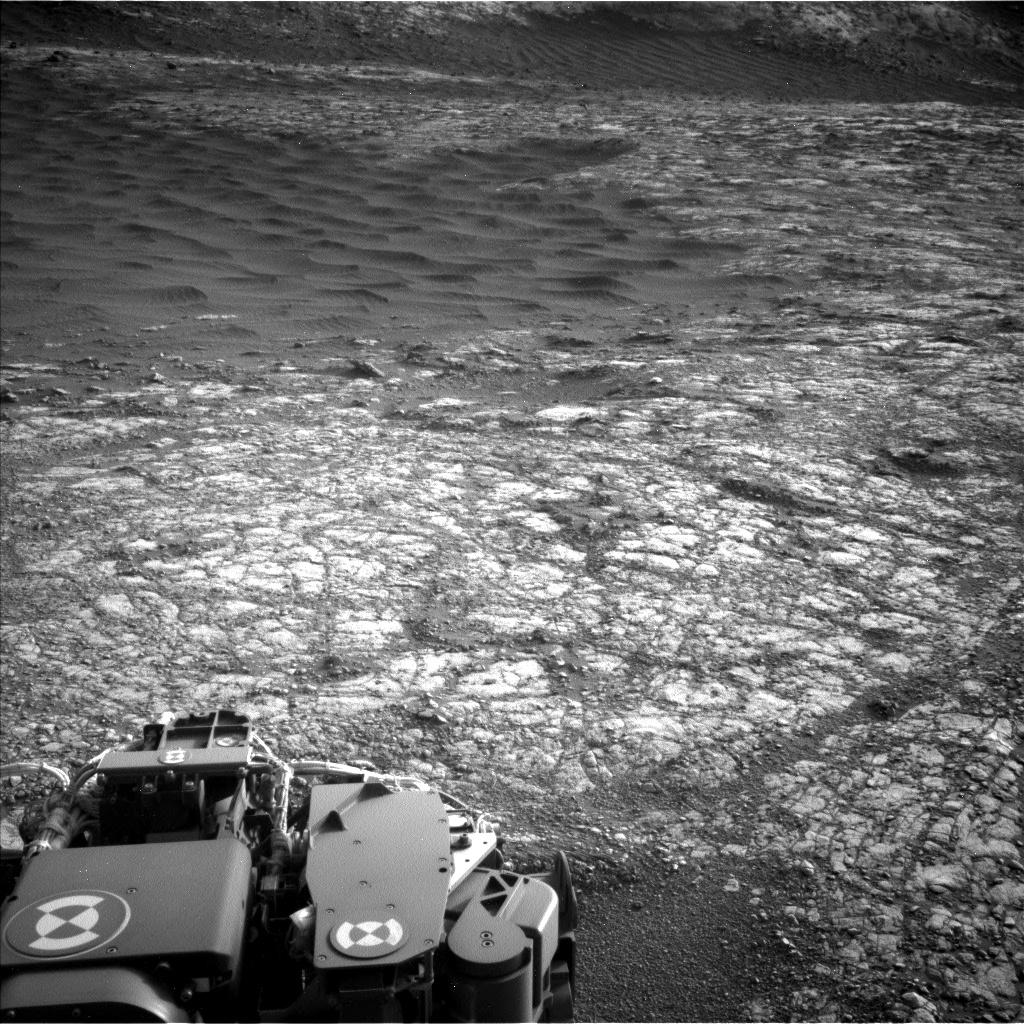
Curiosity Front Hazard Avoidance Camera Right B photo taken on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2783 tasks.
Curiosity Front Hazard Avoidance Camera Right B photo taken on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech
“Curiosity is continuing her trek towards the sulfate-bearing unit while studying the local bedrock and environment along the way,” reports Vivian Sun, Planetary Geologist at NASA’s Jet Propulsion Laboratory. The previous drive placed Curiosity in front of several bedrock exposures which will be analyzed extensively before the rover continues driving in a scheduled three-sol plan.
A stone slab, “Heather Island,” is visible at the bottom left of this image taken by Left Navigation Camera onboard NASA’s Mars rover Curiosity on Sol 2783.
Credit: NASA/JPL-Caltech
Star of the plan
The “star of the plan” is the “Heather Island” target which will be studied by four of the rover’s instruments, Sun adds.
First, the rover’s Chemistry and Camera (ChemCam) will take an extended 20-point raster observation across Heather Island. Having more ChemCam data points on this target will enable better comparison with the high-resolution Mars Hand Lens Imager (MAHLI) imaging that comes next, and will help Mars researchers better understand small-scale chemical variations in the bedrock.
Curiosity Left B Navigation Camera image acquired on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech
“The rover will then use the Dust Removal Tool (DRT) to clear dust from Heather Island’s surface,” Sun notes, so that the robot’s Alpha Particle X-Ray Spectrometer (APXS) can better measure the composition of the underlying bedrock.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Curiosity Left B Navigation Camera image acquired on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech
Same target – different aspects
On the plan is using Curiosity’s Mastcam to take a multispectral observation over the same spot.
“This is really a great opportunity to leverage the unique capabilities of multiple instruments to characterize different aspects of the same target,” Sun reports.
Curiosity Left B Navigation Camera image acquired on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech
The rest of the plan is also packed with other observations.
ChemCam will observe “Glame,” a nodular target that will add to a scientific characterization of nodular features in this region.
Curiosity Left B Navigation Camera image acquired on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech
Bedrock targets
Mastcam will also keep busy with four mosaics focused on the pediment and local landscape, and a suite of atmospheric monitoring activities and dust devil observations are also included throughout the plan.
“Curiosity will then drive and take two post-drive ChemCam observations using the AEGIS mode,” Sun concludes, “which will autonomously select bedrock targets at our next stop so that we can get a head start on characterizing the next location.”
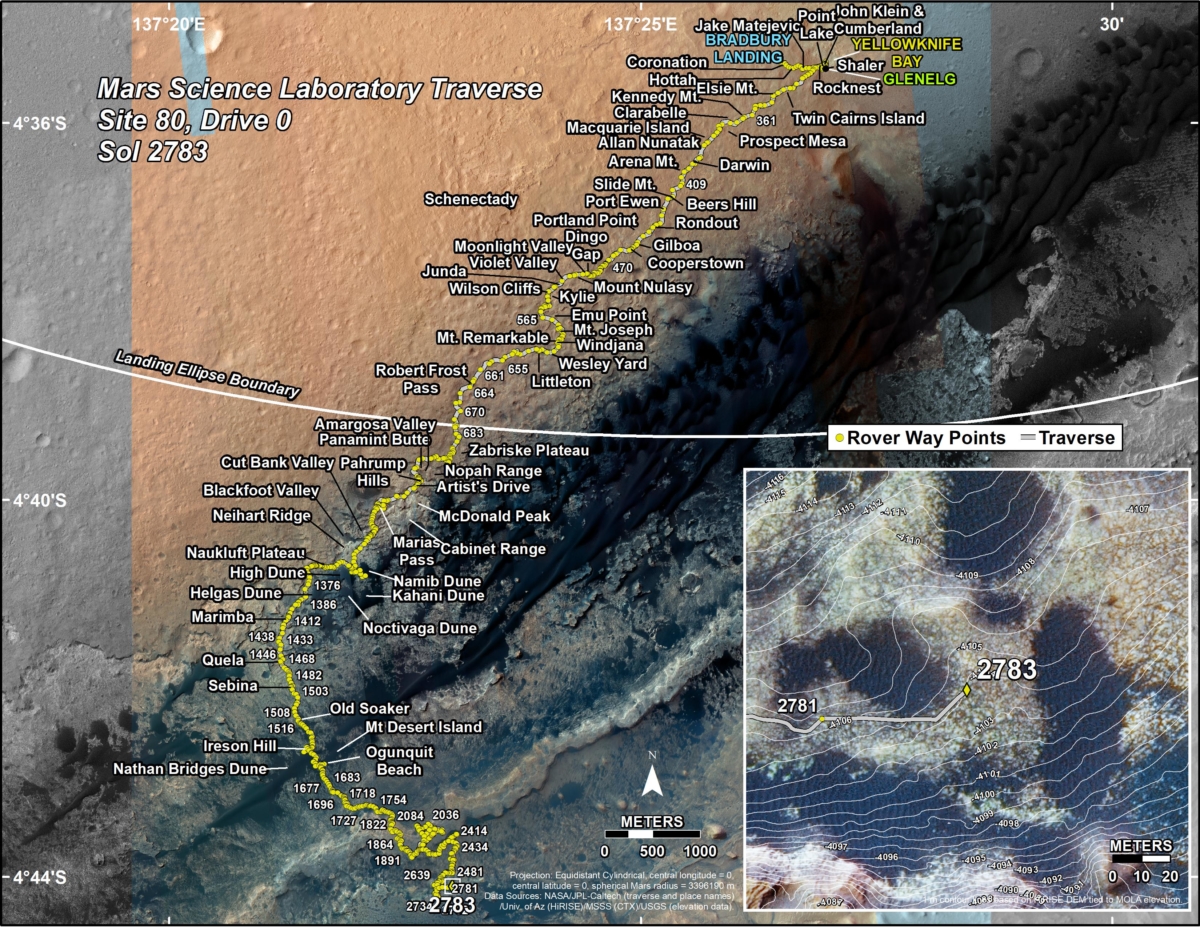
New road map
Meanwhile, a new Curiosity road map shows the route driven by the robot through the 2783 Martian day, or sol, of the rover’s mission on Mars (June 5, 2020).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2781 to Sol 2783, Curiosity had driven a straight line distance of about 168.85 feet (51.47 meters), bringing the rover’s total odometry for the mission to 13.82 miles (22.24 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Curiosity Rear Hazard Avoidance Camera Right B image taken on Sol 2786, June 7, 2020.
Credit: NASA/JPL-Caltech

Credit: New China TV/XinhuaVideo/Inside Outer Space screengrab
Equipment attached to China’s 500-meter Aperture Spherical Telescope, or FAST, is being upgraded to search for extraterrestrial civilizations.
In a China Daily story, Tong-Jie Zhang of Beijing Normal University’s astronomy department explains: “At present, the back-end equipment is being upgraded, and it is expected that new observations can be made after September, when the extraterrestrial civilization search will be launched.”

Credit: CCTV/Screengrab Inside Outer Space
Telescope time
FAST is the largest single-aperture telescope in the world; its 19 beam receiver allows rapid and sensitive sky surveys with robust Radio Frequency Interference (RFI) rejection, a key techno-ingredient for SETI activities.

Credit: CCTV/Screengrab Inside Outer Space
The Chinese astronomical community has planned a drift-scan program covering 57% of the celestial sphere called Commensal Radio Astronomy FAST Survey (CRAFTS).
CRAFTS plans to use more than 5,000 hours of telescope time and to commensally analyze the sky survey data to find possible ETI candidate targets and to then do follow-up observations on these targets.
Credit: Bill Schoening, Vanessa Harvey/REU program/NOAO/AURA/NSF
In the longer term, FAST is planning a sensitive phased array feed, which could provide roughly 100 simultaneous beams, excellent for a next generation SETI sky survey work.
Resources
For an informative American Astronomical Society video discussing SETI with Dan Werthimer, the Marilyn and Watson Alberts SETI Chair within the Astronomy Department and Space Sciences Lab at the University of California, Berkeley, go to:
To read — First SETI Observations with China’s Five-hundred-meter Aperture Spherical radio Telescope (FAST) – go to:
https://arxiv.org/pdf/2002.02130.pdf
For more information on China’s SETI plans, go to:
China Radio Telescope Embarks on ET Search
https://www.leonarddavid.com/china-radio-telescope-embarks-on-et-search/
Also, go to:
Ready, SETI, go: Is there a race to contact E.T.?
https://www.space.com/seti-race-alien-life-search-china.html

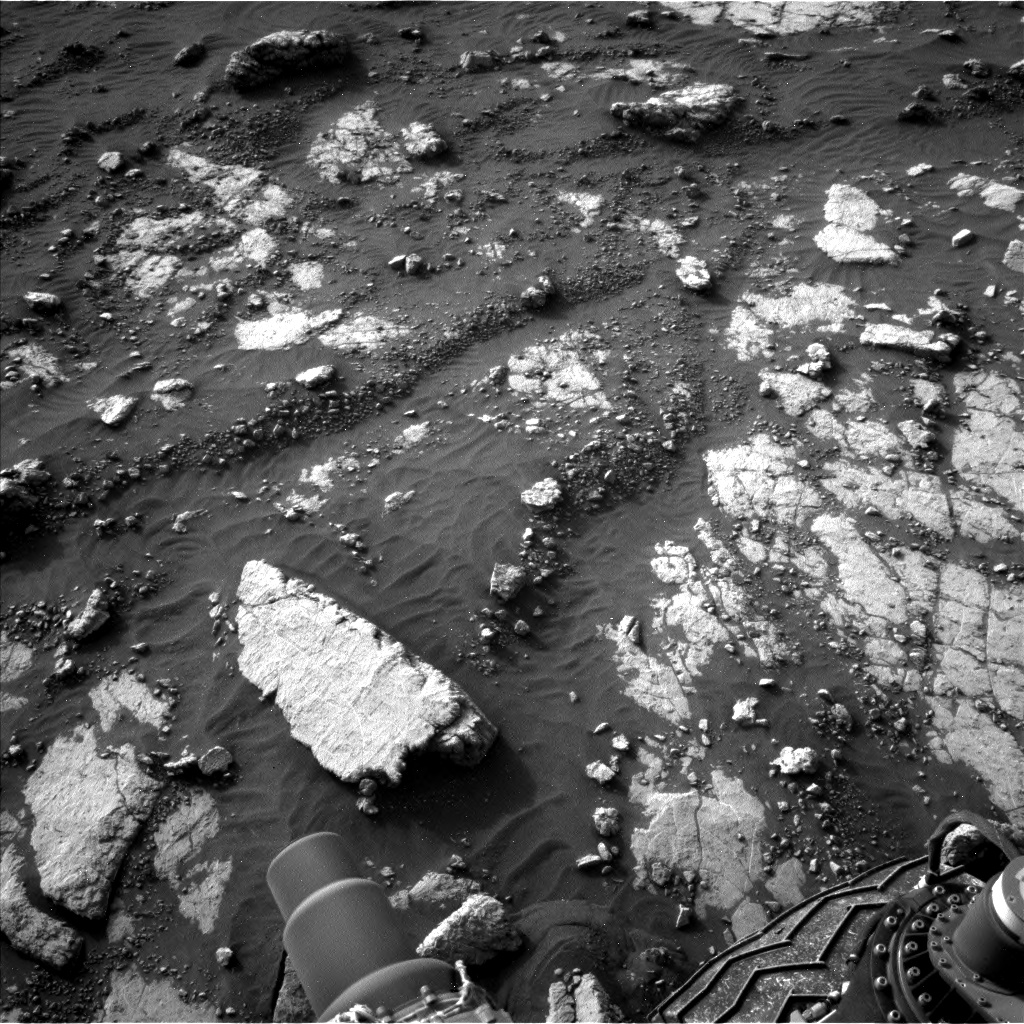
Curiosity Front Hazard Avoidance Camera Left B image taken on Sol 2783, June 4, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2784 tasks.

Curiosity Left B Navigation Camera image acquired on Sol 2783, June 4, 2020.
Credit: NASA/JPL-Caltech
The rover has been investigating an interesting pebble/nodular patch reports Mark Salvatore, a planetary geologist at the University of Michigan.
After a drive of longer than 164 feet (50 meters), Curiosity parked in front of an interesting patch of bedrock and sand well within the previously identified clay-bearing unit, Salvatore notes.

Curiosity Left B Navigation Camera image acquired on Sol 2783, June 4, 2020.
Credit: NASA/JPL-Caltech
Local bedrock
“Scattered within the sediment was a plethora of small pebbles or nodules that seem to be eroding out of the local bedrock,” Salvatore explains.
“Upon this observation, the team was particularly excited about studying these pebbles or nodules and their host bedrock as a means of understanding any chemical differences and the role of physical erosion in the liberation of these materials,” Salvatore adds.

Curiosity Left B Navigation Camera image acquired on Sol 2783, June 4, 2020.
Credit: NASA/JPL-Caltech
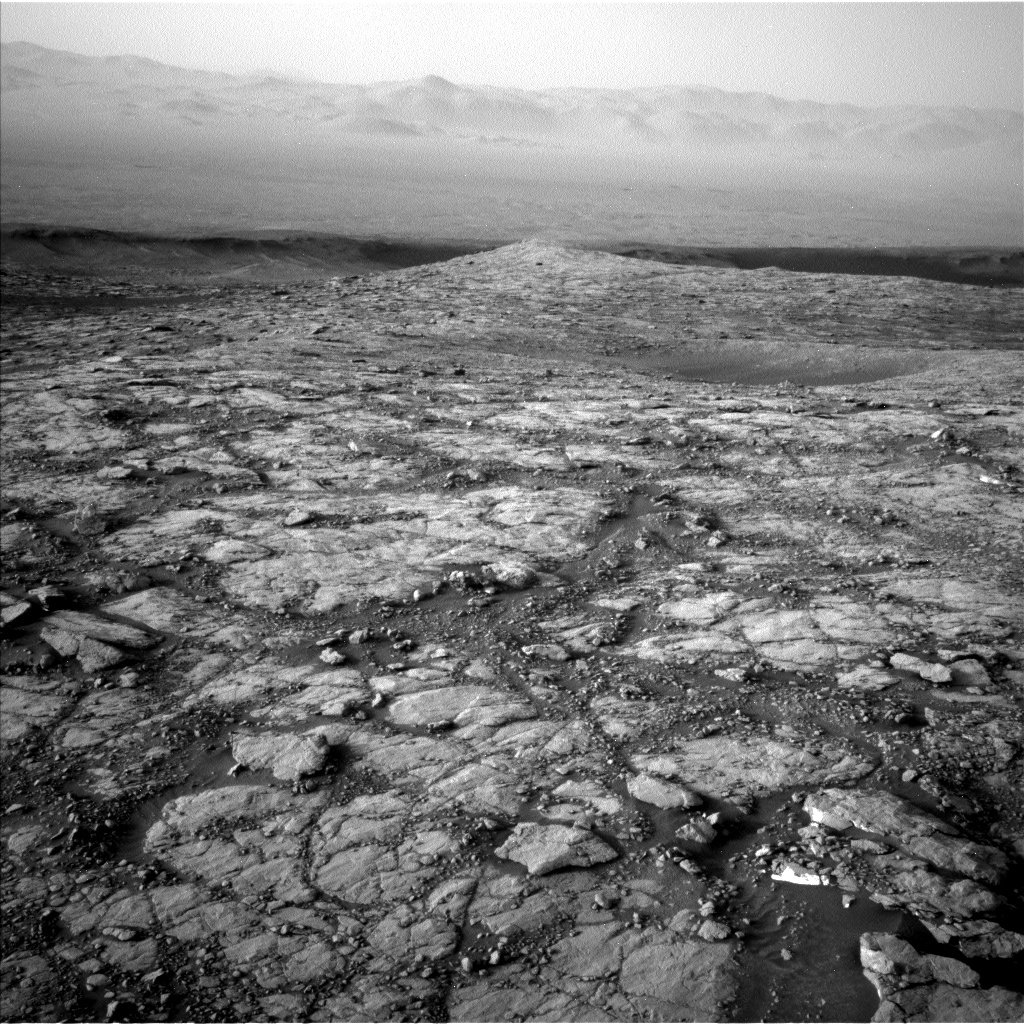
March up Mount Sharp
A recently scripted science plan involved two Chemistry and Camera (ChemCam) Laser-Induced Breakdown Spectrometer (LIBS) chemical analyses of this nodular/pebbly bedrock material. This was done in addition to a large Mastcam mosaic of the nearby pediment and cliff face from this unique vantage point and before the robot drives away.

Curiosity Left B Navigation Camera image acquired on Sol 2783, June 4, 2020.
Credit: NASA/JPL-Caltech
“After another planned drive, we have a series of additional Mastcam mosaics planned to continue improving our understanding of this landscape as we march further uphill in our climb of Mount Sharp,” Salvatore concludes.

Curiosity Left B Navigation Camera image acquired on Sol 2783, June 4, 2020.
Credit: NASA/JPL-Caltech

Curiosity Right B Navigation Camera photo taken on Sol 2783, June 4, 2020.
Credit: NASA/JPL-Caltech

What steps are necessary to establish a cislunar sustainability paradigm?
A new publication underscores the fact that, as more nations become spacefarers and cislunar traffic increases, established and emerging players should employ lessons learned from operations in low Earth orbit and geosynchronous Earth orbit “to be better caretakers of the expanded orbital neighborhood.”
The report — Cislunar Stewardship: Planning for Sustainability and International Cooperation – is available from the Center for Space Policy and Strategy, part of The Aerospace Corporation, a nonprofit organization that advises the government on complex space enterprise and systems engineering problems.
Basic assumptions
Why is cislunar space important? The report notes that, between now and mid-century, some basic assumptions about the state of space operations are reasonable.
— Geosynchronous Earth orbit (GEO) will continue to be valuable and actively used.
— The number of operational satellites, especially in low and medium Earth orbits (LEO and MEO), will increase.
— Space operators will become more numerous and more diverse.
— Orbital debris will continue to be a significant concern.
— A greater variety of cislunar orbits will be used for an assortment of space applications, including communications, navigation, space domain awareness, scientific remote sensing, and human exploration.
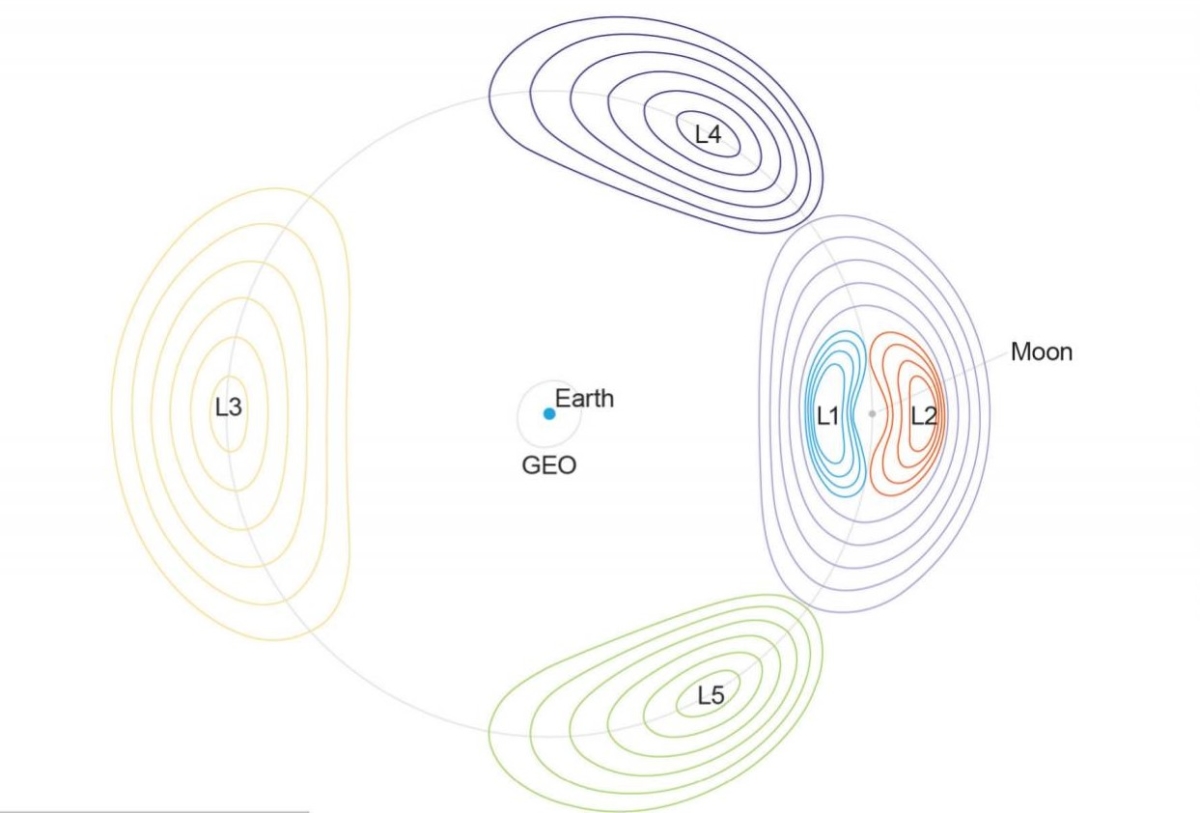
Illustration of several types of cislunar orbits: halo and Lyapunov orbits about the five Lagrange points; distant
retrograde orbits.
Credit: Jonathan Aziz/Center for Space Policy and Strategy
Gravitational and policy stability
“Space operations are expanding beyond the geosynchronous Earth orbit (GEO) to other parts of the Earth-Moon system. As this trend continues, space operators will find preferred orbits and seek to leverage points of relative gravitational stability,” the report explains. “These locations can enable lower-energy transits or provide useful parking places for various types of facilities (e.g., fueling depots, storage sites, and way stations with access to the lunar poles). As cislunar activity grows, a policy framework should be developed to promote the sustainability of operations in these locations.”
To access the report — Cislunar Stewardship: Planning for Sustainability and International Cooperation – go to:
https://aerospace.org/sites/default/files/2020-06/Pollock-Vedda_CislunarStewardship_20200601.pdf
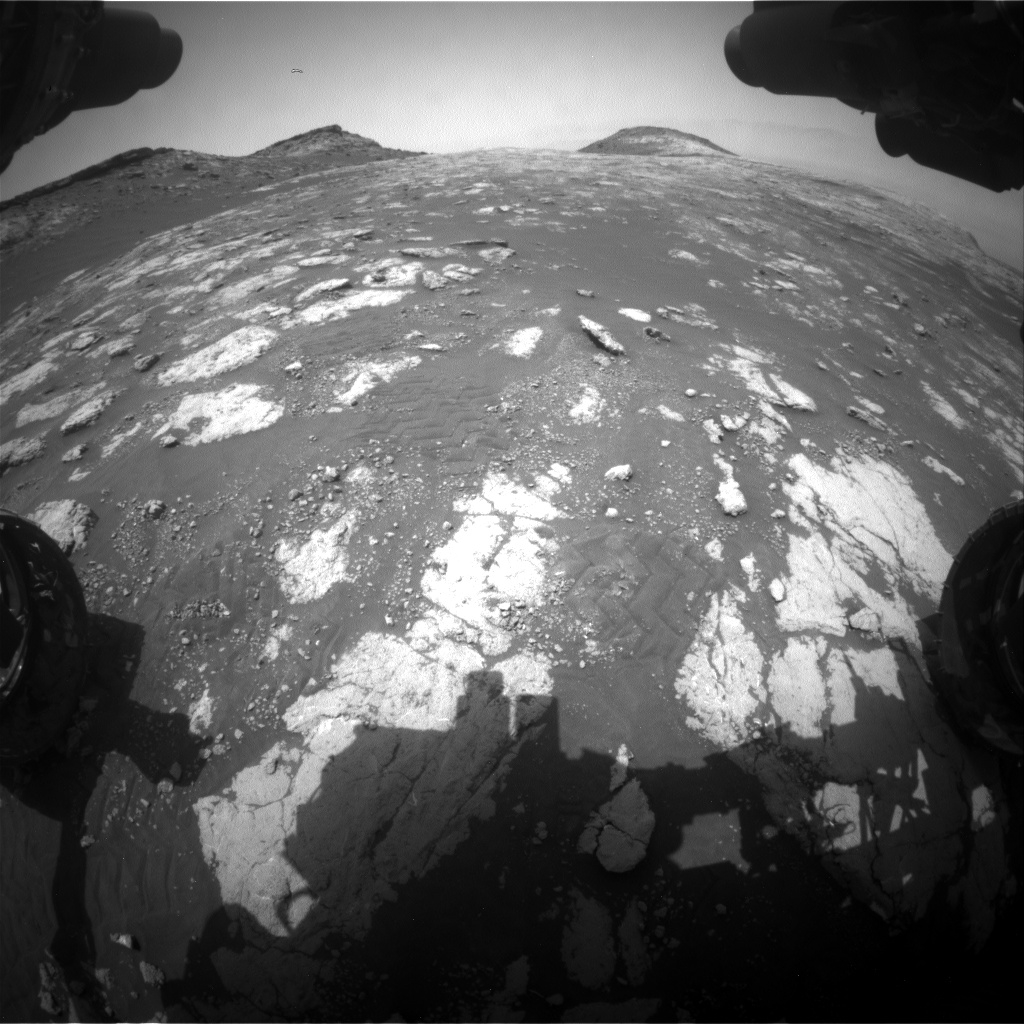
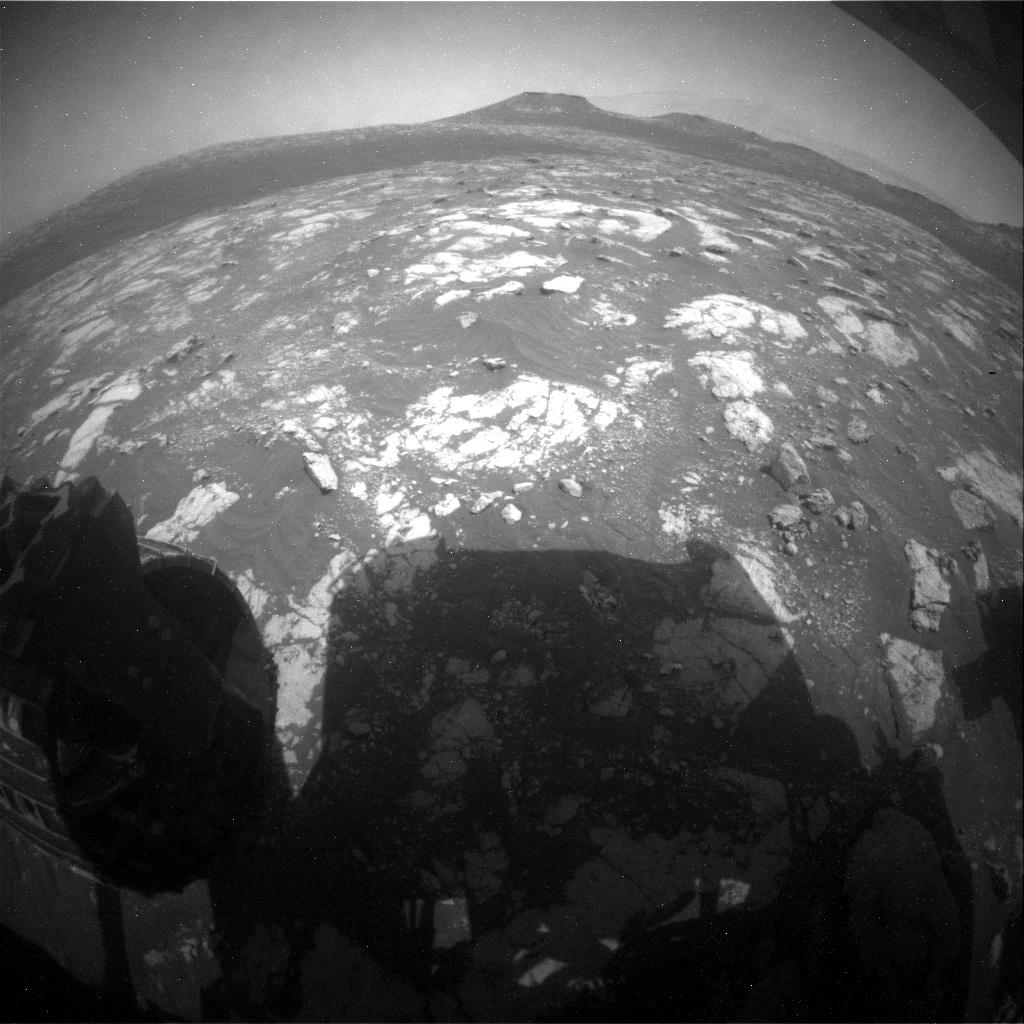
Curiosity Front Hazard Avoidance Camera Right B photo acquired on Sol 2782, June 3, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2783 tasks.

Credit: NASA/JPL-Caltech/Univ. of Arizona
Meanwhile, a new rover road map has been issued.
This map shows the route driven by NASA’s Mars rover Curiosity through the 2780 Martian day, or sol, of the rover’s mission on Mars (June 1, 2020).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2747 to Sol 2780, Curiosity had driven a straight line distance of about 119.44 feet (36.41 meters), bringing the rover’s total odometry for the mission to 13.75 miles (22.13 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
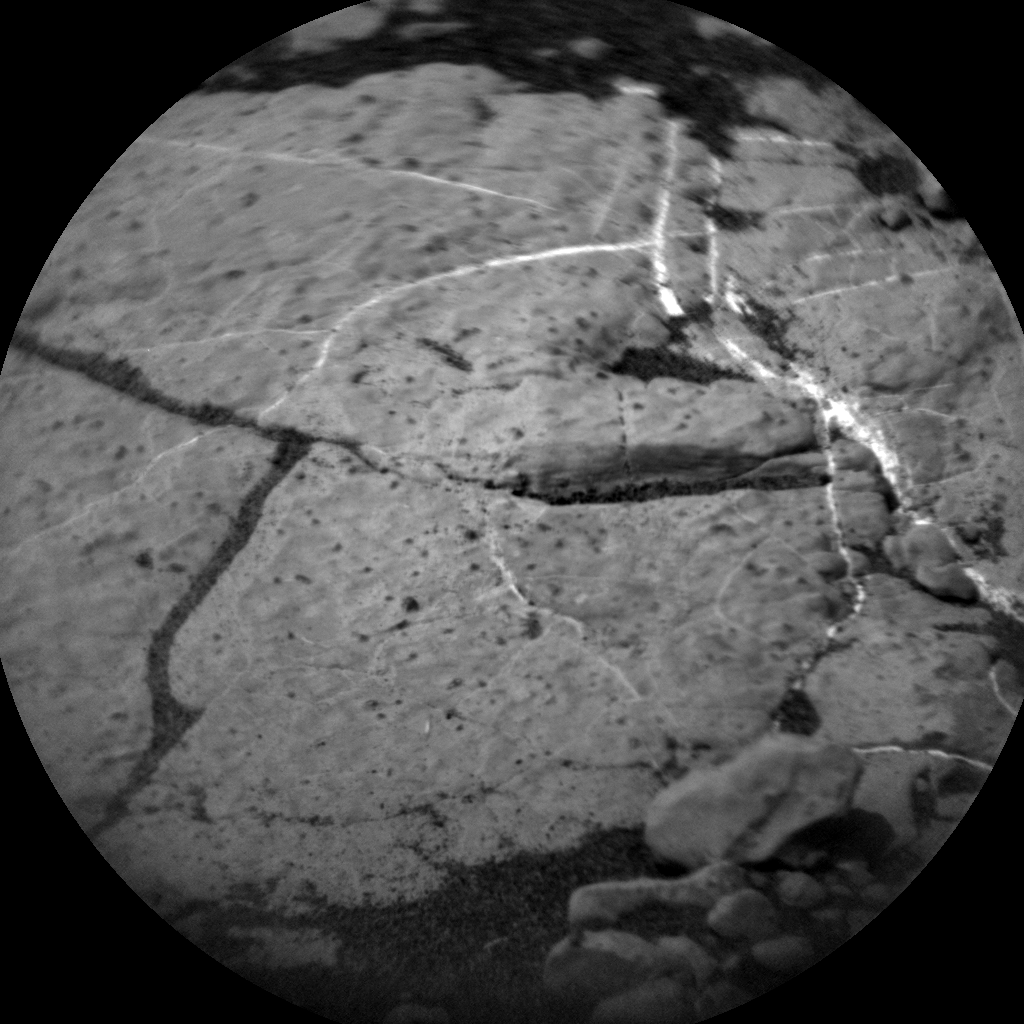
Curiosity Chemistry & Camera Remote Micro-Imager (RMI) photo taken on Sol 2782, June 3, 2020.
Credit: NASA/JPL-Caltech/LANL
Curiosity Rear Hazard Avoidance Camera Right B image taken on Sol 2782, June 3, 2020.
Credit: NASA/JPL-Caltech

Curiosity Left B Navigation Camera image taken on Sol 2781, June 2, 2020.
Credit: NASA/JPL-Caltech
Curiosity Left B Navigation Camera image acquired on Sol 2781, June 2, 2020.
Credit: NASA/JPL-Caltech

Curiosity Mars Descent Imager (MARDI) photo taken on Sol 2781, June 2, 2020.
Credit: NASA/JPL-Caltech/MSSS
Curiosity Right B Navigation Camera photo taken on Sol 2782, June 3, 2020.
Credit: NASA/JPL-Caltech
Curiosity Right B Navigation Camera photo acquired on Sol 2782, June 3, 2020.
Credit: NASA/JPL-Caltech

NASA’s InSight Mars lander acquired this image of the “mole” using its robotic arm-mounted, Instrument Deployment Camera (IDC) on June 1, 2020, Sol 538.
Image Credit: NASA/JPL-Caltech
A new update on that troubled Heat Flow and Physical Properties Package (HP3) experiment deployed by NASA’s Insight Mars lander.

Engineers in a Mars-like test area at NASA’s Jet Propulsion Laboratory try possible strategies to aid the Heat Flow and Physical Properties Package (HP3) on NASA’s InSight lander, using engineering models of the lander, robotic arm and instrument.
Credit: Tilman/NASA/JPL-Caltech
The “mole” is part of the HP3 and has only managed to partially bury itself since it started hammering in February 2019.
Good news
“We have good news! The mole is in the ground and we will be starting testing whether or not it will proceed on its own now next Saturday,” reports Tilman Spohn of the German Aerospace Center’s (DLR) Institute of Planetary Research in Berlin.
Spohn adds that the back-cap push series of operations on Insight was quite risky and went on slowly and step by step. “I was more inclined to be able to report success rather than failure. I hope for your understanding,” he notes.

NASA’s InSight Mars lander acquired this image using its robotic arm-mounted, Instrument Deployment Camera (IDC) on October 27, 2019, Sol 326.
Credit: NASA/JPL-Caltech
Corona lock-down
“One of these days we may perhaps dare to say that the team used the Corona lock-down well to bring the mole in,” Spohn concludes. “In fact communications with everybody else sitting in front of their computers was comparatively easy.”
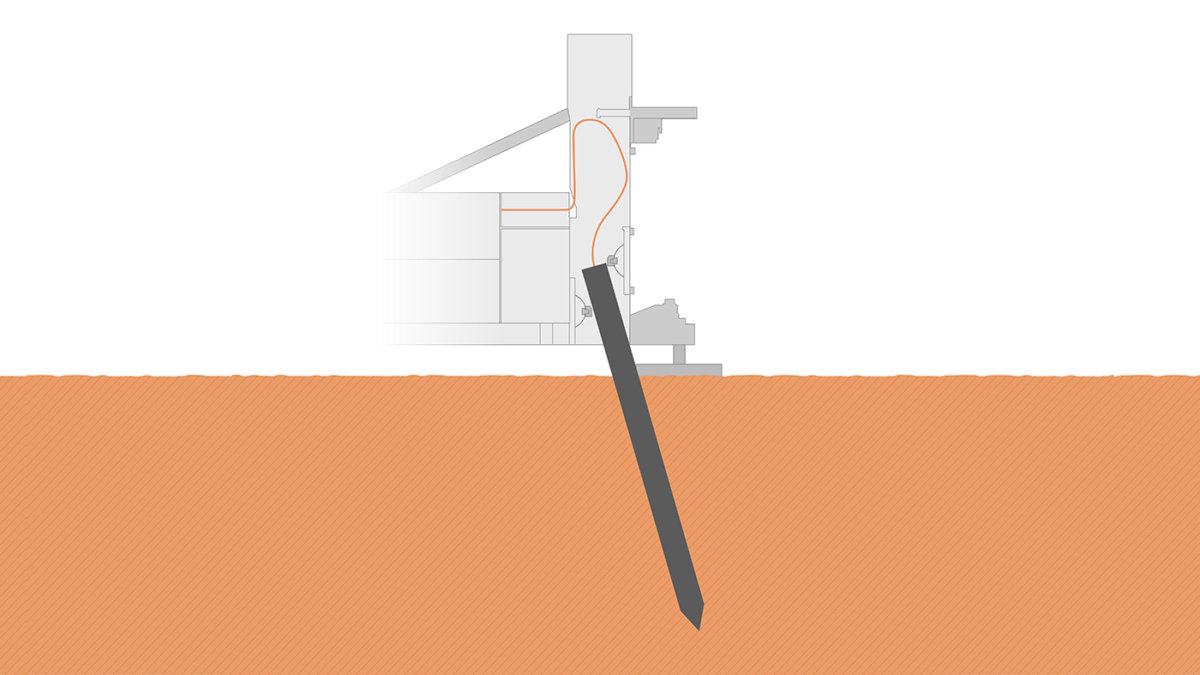
The self-hammering mole, part of the Heat Flow and Physical Properties Package (HP3) on NASA’s InSight lander, was only partially buried in the soil of Mars as of early June 2019, as shown in this illustration.
Credit: NASA/JPL-Caltech/DLR
The Germany-provided HP3 was deployed by NASA’s Insight lender that touched down on the Red Planet in November 2018.
“Mars (and the mole) continue to make our lives…how should I say…interesting,” explained Spohn in an earlier communiqué this year.

Curiosity Left B Navigation Camera image taken on Sol 2780, June 1, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2781 duties.
Recent planning calls for the robot wheeling more than 1.5 kilometers – driving to the next major unit of Mt. Sharp, the “sulfate-bearing” unit.

Curiosity Front Hazard Avoidance Camera Left B image acquired on Sol 2780, June 1, 2020.
Credit: NASA/JPL-Caltech
“During this traverse the focus will be on driving as far as we can each sol, but we’ll still be doing plenty of science along the way,” reports Ryan Anderson, a planetary geologist at USGS Astrogeology Science Center in Flagstaff, Arizona.

Curiosity Left B Navigation Camera image taken on Sol 2780, June 1, 2020.
Credit: NASA/JPL-Caltech
Polygonal patterns
Sol 2781 begins with Chemistry and Camera (ChemCam) observations of smooth bedrock at the target “Beaconsfield” and nodular bedrock at the target “Pict.”
The rover’s Mastcam will then document the ChemCam targets and collect a stereo mosaic of some nearby polygonal patterns. Navcam will then study atmospheric dust and take a mosaic of the rover deck.

Curiosity Right B Navigation Camera image taken on Sol 2780, June 1, 2020.
Credit: NASA/JPL-Caltech
Driving on autonav
“After that the rover will drive as far as possible,” Anderson adds, “first using our usual driving mode and then using the rover’s “autonav” capability. Autonav uses the onboard computer to map the terrain so the rover can carefully continue driving farther than our current images can see well. It has been a while since we used autonav, but we’re using all the tools at our disposal to make progress toward the sulfate unit.”
Curiosity’s Navcam will take some images during and after the drive. After the drive Mastcam will make some atmospheric observations and take an image of the ground to monitor soils and rocks during the drive.

Curiosity Left B Navigation Camera image taken on Sol 2780, June 1, 2020.
Credit: NASA/JPL-Caltech
The Mars Descent Imager (MARDI) will also document the ground beneath the rover.
Autonomously targeted observation
“On Sol 2782, Navcam will observe the rover deck again, as well as watch for dust devils, and ChemCam will make an autonomously targeted observation,” Anderson says.

Curiosity Chemistry & Camera Remote Micro-Imager (RMI) photo acquired on Sol 2779, May 31, 2020.
Credit: NASA/JPL-Caltech/LANL

Curiosity Chemistry & Camera Remote Micro-Imager (RMI) photo acquired on Sol 2779, May 31, 2020.
Credit: NASA/JPL-Caltech/LANL
Also, the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) will do an overnight observation of an empty cell (this gives a baseline to compare with when analyzing samples later on), Anderson concludes.

