Archive for April, 2020

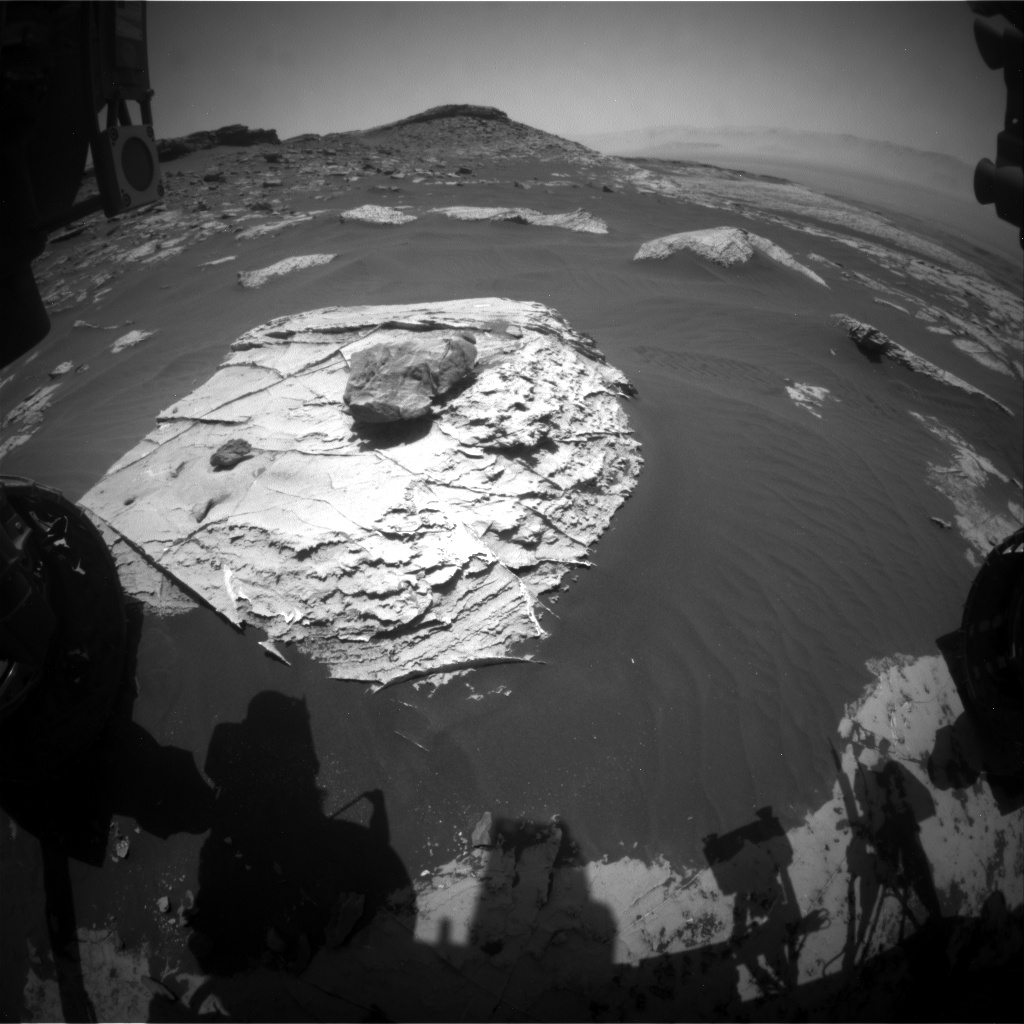
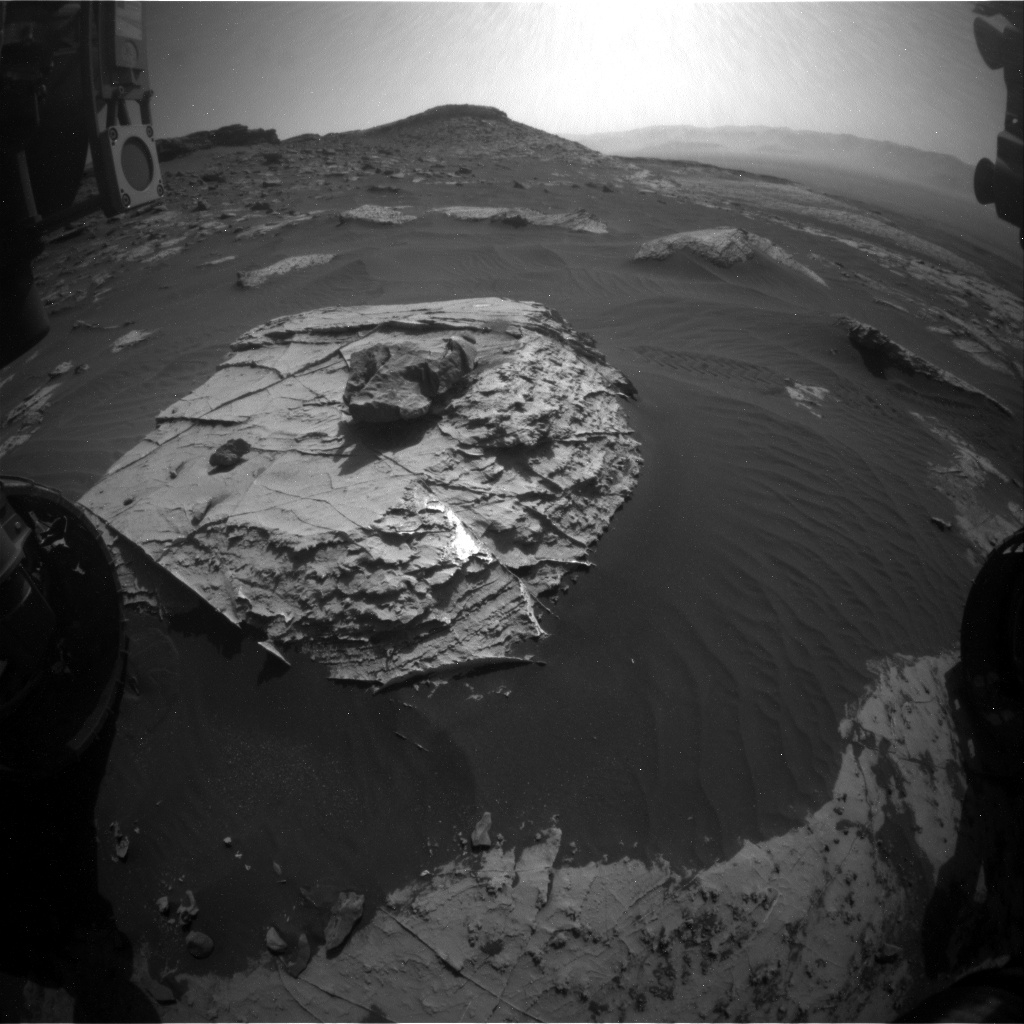
Curiosity Front Hazard Avoidance Camera Left B image taken on Sol 2741, April 22, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now carrying out Sol 2742 tasks.

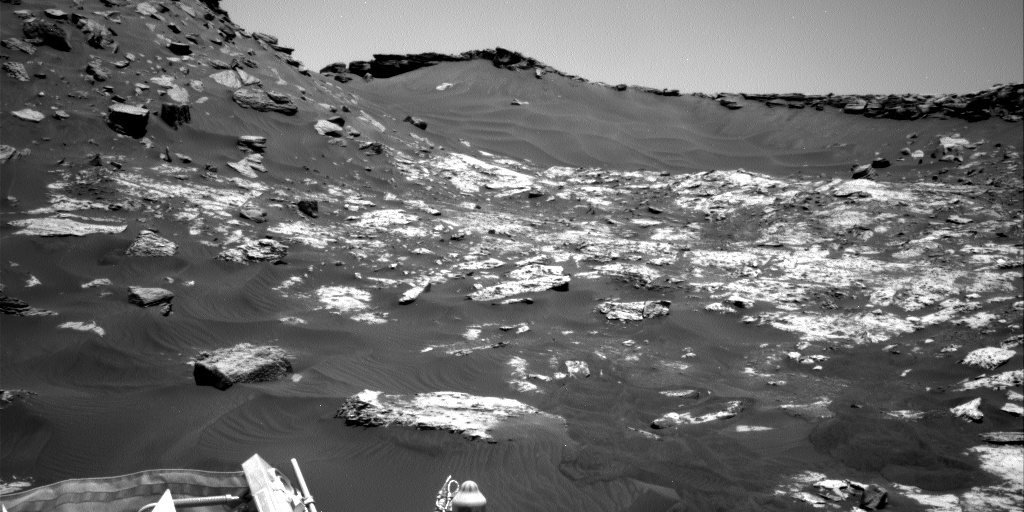
Curiosity Right B Navigation Camera photo acquired on Sol 274, April 22, 2020.
Credit: NASA/JPL-Caltech

Curiosity Right B Navigation Camera photo acquired on Sol 274, April 22, 2020.
Credit: NASA/JPL-Caltech
Curiosity is ready to drive again, reports Abigail Fraeman, a planetary geologist at NASA’s Jet Propulsion Laboratory. The main activity in a two sol plan – Sols 2742-2743 — will be a drive of roughly 213 feet (65-meters) to the north/north east that skirts nearby “Tower butte.”
“The drive is slated to occur in the early afternoon of the first sol of the plan,” Fraeman adds. Before the drive, Mars scientists will collect a little more remote sensing data of the area around the robot, including Chemistry and Camera (ChemCam) observations of targets named “Salen,” “Crossbill,” and “Burg,” as well as a Remote Micro Imager (RMI) telescope mosaic of an area named “Uphall.”

Curiosity Chemistry & Camera RMI photo taken on Sol 2741, April 22, 2020.
Credit: NASA/JPL-Caltech/LANL

Curiosity Chemistry & Camera RMI photo taken on Sol 2741, April 22, 2020.
Credit: NASA/JPL-Caltech/LANL
“Mastcam will image the ChemCam targets and also take pictures of the Sun and crater rim, which will give the team information about current atmospheric conditions,” Fraeman explains. “All of the science on the second sol of the plan happens after the drive, so we will take untargeted observations that include a clast survey, ChemCam autonomously targeted observation using the [Autonomous Exploration for Gathering of Increased Science] (AEGIS) software, and Navcam images to further characterize the atmosphere and also search for dust devils.”
“It feels great to be hitting the Martian road once again, and I’m really looking forward to seeing what’s around the bend,” Fraeman concludes.

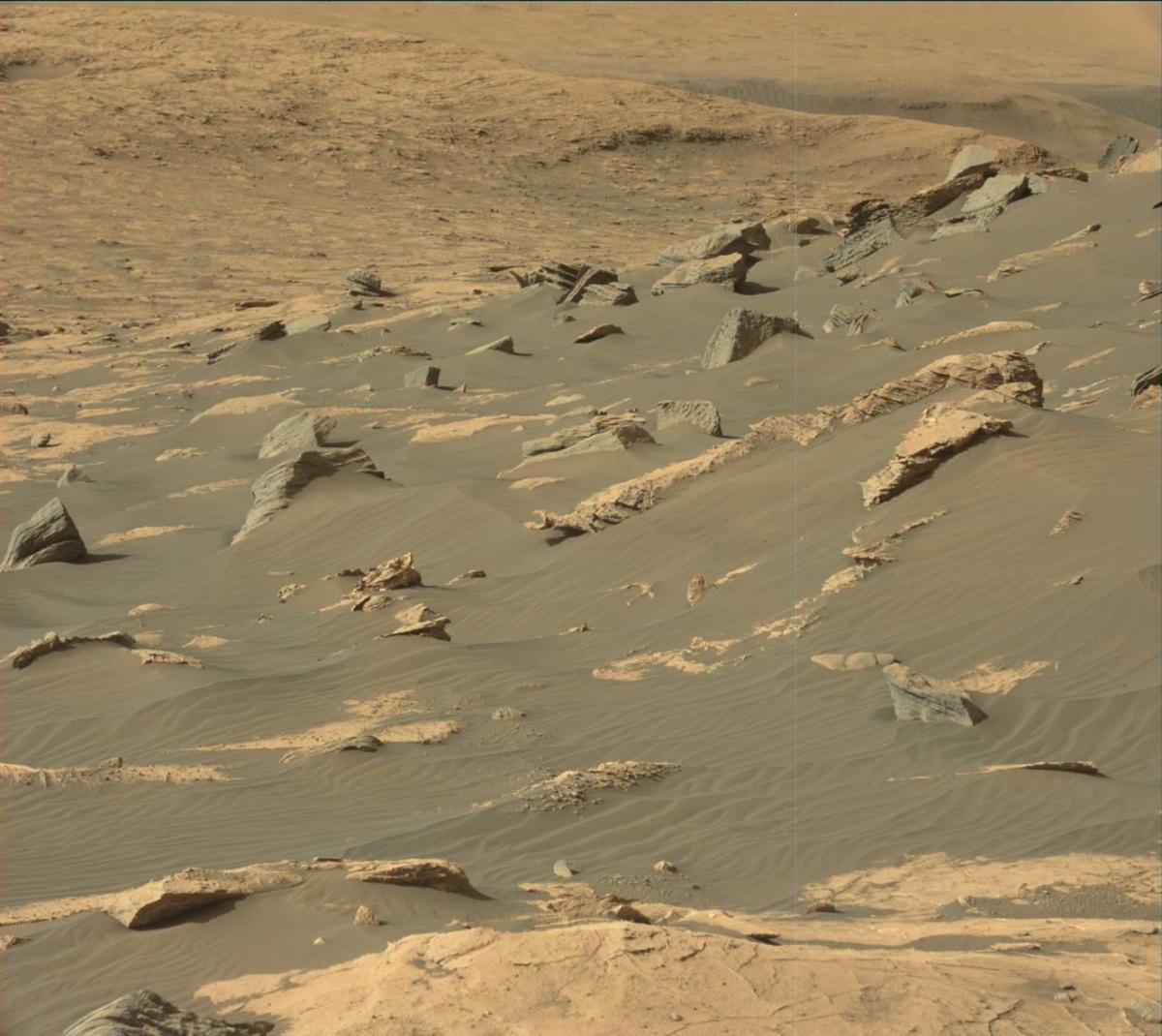
Curiosity Mast Camera Left photo taken on Sol 2740, April 21, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Right image acquired on Sol 2740, April 21, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Right image acquired on Sol 2740, April 21, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Right image acquired on Sol 2740, April 21, 2020.
Credit: NASA/JPL-Caltech/MSSS

Credit: ESA/IBMP
If you are going stir-crazy in these times of confinement, think of it as potential training for a Mars trek.
European Space Agency (ESA) astronaut support engineer Romain Charles has a set of nine tips on how to live in isolation (video link below). Charles spent 520 days locked in a mockup spacecraft.
High-fidelity simulation
The Mars500 locked in six ‘marsonauts’ within a simulated spaceship near Moscow, Russia at the Institute of Biomedical Problems (IBMP) for 520 days, the time it would take to fly to Mars and back plus 30 days spent exploring its surface.
It was the first full-length, high-fidelity simulation of a human mission to the Red Planet. The crew went into lockdown on June 3, 2010, and they did not open the hatch until 17 months later on November 4, 2011.

Module for Mars 500 experience at Russia’s Institute of Biomedical Problems (IBMP). Credit: ESA/IBMP
Psychological survival
The Mars 500 was a deemed successful in that it proved that humans can psychologically survive the inevitable isolation that is needed for a mission to Mars and back.
The crew did well coping with the simulated mission, with little variation in food and even a communication delay over 12 minutes one-way.
The participants from Italy, Russia, China and France had no external cues such as the Sun going down at night to remind them when to sleep.
Go to this ESA video at:

Curiosity Right B Navigation Camera photo taken on Sol 2739, April 20, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2740 tasks.

The Mars Hand Lens Imager, called MAHLI, is the rover’s version of the magnifying hand lens that geologists usually carry with them into the field. MAHLI’s close-up images reveal the minerals and textures in rock surfaces.
Credit: NASA/JPL-Caltech/MSSS
Reports Ryan Anderson, a planetary geologist at USGS Astrogeology Science Center in Flagstaff, Arizona, the plan for Sol 2740 and 2741 is focused on diagnosing the issue with the robot’s Mars Hand Lens Imager (MAHLI).
There was an issue with MAHLI on sol 2735 that caused Curiosity’s arm motion to stop before the instrument was positioned on the rock target “Creig.”
“But while we are sitting in one place, we will also collect plenty of remote sensing data of the area around the rover,” Anderson adds. “On Sol 2740 MAHLI will close its dust cover while Mastcam takes a video, and then both Mastcam and Navcam will take some follow up images once the cover is closed.”
Curiosity Front Hazard Avoidance Camera Left B image acquired on Sol 2739, April 20, 2020.
Credit: NASA/JPL-Caltech
Atmospheric dust
Once that is done, the rover’s Chemistry and Camera (ChemCam) will observe the targets “Beinn An Dudhaich,” “Peach,” and “Edina.” That will be followed by atmospheric observations: Navcam will look at atmospheric dust toward the northern horizon and will then search for dust devil activity.

Curiosity Mast Camera Right image taken on Sol 2738, April 19, 2020.
Credit: NASA/JPL-Caltech/MSSS
Navcam will also take an “upper tier” mosaic, Anderson notes, “to be able to see all of Mount Sharp.”
Mastcam will then also look toward the crater rim and at the Sun to measure dust in the atmosphere.
Telescope mosaic
Sol 2741 will start with another Navcam image to the north, followed by a 10 frame ChemCam Remote Micro Imager (RMI) telescope mosaic of part of the pediment cap called “Ogre Hill.”

Curiosity Right B Navigation Camera image acquired on Sol 2738, April 19, 2020.
Credit: NASA/JPL-Caltech
Mastcam will take a three-frame mosaic of the same area, plus a two-frame mosaic of the ChemCam Laser Induced Breakdown Spectroscopy (LIBS) targets from the previous sol. Finally, Navcam will take a three-frame mosaic of the rover deck “to see how dusty things are getting,” Anderson concludes.

Credit: NOAA
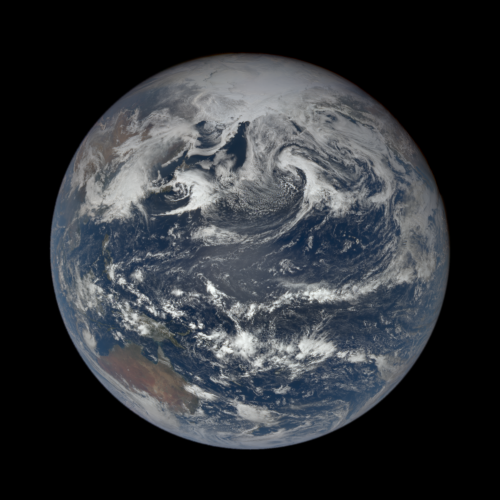
The Deep Space Climate Observatory (DSCOVR) is an American space weather station in position about a million miles from Earth in a unique location called Lagrange point 1, which basically allows it to hover between the Sun and our planet.
The spacecraft’s Earth Polychromatic Imaging Camera (EPIC) camera takes a new picture of Earth every two hours.
Launched on Feb 11, 2015, DSCOVR arrived at the Sun–Earth L1 Lagrange point on June 8, 2015.
DSCOVR is a joint mission between NASA, NOAA, and the USAF.
Here’s a selection of DSCOVR images taken April 19, 2020, a prelude to
Earth Day that is celebrated on April 22 in the United States and on either April 22 or the day the spring equinox occurs throughout the rest of the world. For more information on DSCOVR, go to: https://epic.gsfc.nasa.gov/
Credit: NASA/GSFC

Credit: NASA/GSFC

Credit: NASA/GSFC

Credit: NASA/GSFC

Proposed fleet of optical telescopes to image habitable planets.
Courtesy: Karl Jacobs/The Aerospace Corporation
A two-year grant is supporting the further maturation of Solar Gravity Lens (SGL) technologies to send a fleet of optical telescopes to image habitable planets far beyond our solar system.
The SGL concept has received a $2 million grant by NASA’s Innovative Advanced Concepts (NIAC) program, a mission led by NASA’s Jet Propulsion Laboratory with The Aerospace Corporation as the mission architect.
Viable roadmap
Previously, the SGL team received NIAC Phase I and II awards.
The first two phases demonstrated basic concept feasibility and invented a novel mission architecture using multiple low-cost spacecraft. This architecture permitted phased launches by multiple partners to observe exoplanets, which are planets that orbit around other stars.

Courtesy: Karl Jacobs/The Aerospace Corporation
The team also defined a viable roadmap toward building the required SGL mission capability, beginning with a technology demonstration mission in the 2023–24 time period – and leading to a full-scale SGL mission a decade later.
High-speed exit
The NIAC award pushed forward a proof-of-concept flight that would exit the solar system faster than any previous spacecraft, notes Tom Heinsheimer, Aerospace’s technical co-lead for SGL.
“Then we would fly swarms of cooperating smallsats to observe the images of exoplanets substantially magnified by the predictions of Einstein as how light behaves around massive objects,” Heinsheimer adds in an Aerospace Corporation statement.

Courtesy: Karl Jacobs/The Aerospace Corporation
Using techniques developed by the concept’s principal investigator, Slava Turyshev of JPL, this data would be converted into exoplanet images. “Our smallsat architecture can simultaneously explore many exoplanetary systems, bringing us closer to the discovery of distant life in the universe.”

Record-toting Voyager spacecraft.
Credit: NASA/JPL
Outbound microchips
Henry Helvajian, senior scientist in Aerospace’s Physical Sciences Laboratories and technical co-lead of SGL said, “When the collection of exoplanet images is complete, hundreds of SGL spacecraft will sail outward toward the cosmos, carrying microchips that portray life on Earth…building on the legacy of the Voyager Golden Records launched on Voyager Spacecraft in 1977.”

Curiosity Left B Navigation Camera image taken on Sol 2737, April 18, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now engaged in Sol 2739 duties.
Curiosity encountered an issue with its Mars Hand Lens Imager (MAHLI), reports Melissa Rice, a planetary geologist at Western Washington University in Bellingham, Washington.
Up in the air

Curiosity Mast Camera Right photo acquired on Sol 2737, April 18, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Right photo acquired on Sol 2737, April 18, 2020.
Credit: NASA/JPL-Caltech/MSSS
New imagery shows the MAHLI instrument literally up in the air due to an issue with MAHLI on sol 2735 that caused Curiosity’s arm motion to stop before the instrument was positioned on the rock target “Creig.”
“Before the issue occurred, Curiosity had used the Dust Removal Tool (DRT) to brush the target clean,” Rice explains. The good news is that the robot’s Alpha Particle X-Ray Spectrometer (APXS) instrument still acquired its data on sol 2735, even though the arm was pointing it up and away from the intended rock.
“This dataset can tell us about the chemical composition of Mars’ atmosphere,” Rice adds, “and we had been intending to collect this information in the near future anyway. Looks like Curiosity was just eager to study the atmospheric chemistry ahead of schedule!”

Curiosity Rear Hazard Avoidance Camera Right B image taken on Sol 2738, April 19, 2020.
Credit: NASA/JPL-Caltech
Resume driving
The focus of late has been on diagnosing the issue with MAHLI. In addition, Curiosity will continue to explore the vicinity by taking Mastcam images of the Creig DRT spot…the rover’s wheel tracks, the pediment behind the rover,” Rice says.

Curiosity Right B Navigation Camera image acquired on Sol 2738, April 19, 2020.
Credit: NASA/JPL-Caltech
Curiosity Right B Navigation Camera image acquired on Sol 2738, April 19, 2020.
Credit: NASA/JPL-Caltech

Curiosity will also use the Chemistry and Camera (ChemCam) instrument to study small-scale features in the outcrop, which is rife with veins and nodules: these targets are named “Beinn_an_Dudhaich,” “Beinn_Alligin,” “Beinn_Mhor,” “Ben_Arthur,” and “Ben_Wyvis.”
“Once the issue with MAHLI is understood,” Rice concludes, “Curiosity will resume driving northeast to the next area of interest.”

An artificial intelligence-imbued assistant has been tested aboard the International Space Station.
The free-flying, spherical technology demonstrator with AI showed off a number of its features during interactions with ESA astronaut Luca Parmitano.
CIMON-2 is an updated version of the Crew Interactive MObile companioN astronaut. The degree of autonomy of the battery-powered assistant has been increased by around 30% contrasted to CIMON-1.
The prototype of the technology experiment flew on board the ISS in a July 2018 to August 2019 time period, making its 90-minute debut – a world first – on November 15, 2018 with German ESA astronaut Alexander Gerst.

German ESA astronaut Alexander Gerst with CIMON prototype.
Credit: ESA/NASA
CIMON-2 was a payload on the CRS-19 supply mission to ISS back in early December 2019. It is scheduled to stay on the orbiting outpost for up to three years.
Taking inventory
Developed and built in Germany, CIMON is a technology experiment to support astronauts and increase the efficiency of their work. CIMON is able to show and explain information and instructions for scientific experiments and repairs.
The voice-controlled access to documents and media is an advantage, as the astronauts can keep both hands free. It can also be used as a mobile camera to save astronaut crew time.
In particular, CIMON could be used to perform routine tasks, such as documenting experiments, searching for objects and taking inventory.

ESA astronaut Luca Parmitano works with CIMON-2 aboard the International Space Station.
Credit: ESA/NASA
CIMON says
CIMON can also see, hear, understand and speak. CIMON is able to orientate itself using its ‘eyes’ – a stereo camera and a high-resolution camera that it uses for facial recognition – as well as two other cameras fitted to its sides that it uses for photos and video documentation.
Utilizing navigation capabilities, CIMON-2 was able to follow verbal commands to move to a particular location, regardless of where it was to begin with.
Additionally, ISS crew members can activate a feature on CIMON-2 that allows it to analyze emotion in language and show empathy when interacting with the astronauts.
CIMON lays the foundations for social assistance systems that could reduce stress resulting from isolation or group dynamics during long-term missions. Such systems could also possibly help to minimize similar problems back on Earth as well.

Earth orbiting research lab – the International Space Station (ISS).
Credit: NASA
Captain future
The interactive astronaut assistant CIMON was developed and built by Airbus in Friedrichshafen and Bremen on behalf of the German Aerospace Center Space Administration (Deutsches Zentrum für Luft- und Raumfahrt – DLR) and funded by the German Federal Ministry for Economic Affairs and Energy.
Watson AI technology from IBM Cloud provides voice-controlled artificial intelligence. Scientists from the Ludwig-Maximilian University Hospital in Munich (LMU) helped develop and oversee the human aspects of the assistance system. Biotesc at the University of Lucerne were also engaged to make sure that CIMON works perfectly in the Columbus module of the ISS and supports interaction of astronauts with CIMON.
According to an Airbus statement, it is no coincidence that CIMON’s name is reminiscent of “Professor Simon Wright — a human brain living in a transparent, nuclear-powered life support case, with tentacle-mounted optics — or the “flying brain” – from the Japanese science fiction series Captain Future.

Curiosity Mast Camera Left photo taken on Sol 2736, April 17, 2020.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now engaged in Sol 2738 tasks.
A selection of new images showcases the robot’s surroundings:
Curiosity Mast Camera Left photo taken on Sol 2736, April 17, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Left photo taken on Sol 2736, April 17, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Left photo taken on Sol 2736, April 17, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Left photo taken on Sol 2736, April 17, 2020.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mast Camera Left photo taken on Sol 2736, April 17, 2020.
Credit: NASA/JPL-Caltech/MSSS
Curiosity Front Hazard Avoidance Camera Left B image acquired on Sol 2737, April 18, 2020.
Credit: NASA/JPL-Caltech

The prospects for further economic expansion into space seem full of promise with plans to send human exploration missions beyond Earth orbit to open new frontiers. To enable this process, there are a few fundamental questions:
— Why should we try to stimulate this economic expansion?
— What are the benefits to society?
— What steps can best facilitate it?

Credit: NASA/ESA
Opinion paper
The American Institute of Aeronautics and Astronautics (AIAA) has issued Recommendations for In-Space Infrastructure Initiative: Enabling In-Space Infrastructure to Provide Economic and Societal Benefits.
This AIAA opinion paper explains that in-space infrastructure would consist of the systems and services operating in Earth’s neighborhood to facilitate commerce, exploration, and scientific discovery.
Earth orbiting research lab – the International Space Station (ISS).
Credit: NASA
Immediate need
“We postulate that there is an immediate need for at least a ‘critical mass’ of in-space infrastructure to be planned, funded, and implemented to expedite broader, efficient, and easy access to cislunar space for all interested stakeholders/participants, and lay the foundation of a vibrant space-based economy,” the document notes.
“Since a fully developed space economy will have worldwide significance and impact, we further suggest that a global advocacy for development of an in-space infrastructure should be initiated,” explains the document.
To read the full AIAA opinion paper – Recommendations for In-Space Infrastructure Initiative: Enabling In-Space Infrastructure to Provide Economic and Societal Benefits – go to:

China plans to launch the ambitious Chang’e 5 lunar sample return mission later in 2020. (Image credit: Used with permission: Loren Roberts/The Planetary Society at https://www.planetary.org/)
China appears on track to launch the Chang’e-5 sample-return mission to the Moon later this year.
That venture represents the third phase of China’s lunar exploration project – returning samples from the Moon.

Part of China’s lunar sample receiving laboratory.
Credit: G. L. Zhang, et al.
If successful, China would become the third nation to haul back to Earth lunar collectibles.

Moonwalking geologist, Apollo 17’s Jack Schmitt.
Credit: NASA
The former Soviet Union did so by robotic means in the 1970s. During 1969-1972, six Apollo missions placed 12 moonwalkers on the Moon that gathered 842 pounds (382 kilograms) of lunar samples at different landing sites on the lunar surface. The stash included rocks, core samples, lunar soil and dust.
Credit: NASA
The Chang’e-5 mission is comprised of four parts including the orbiter, ascender, lander, and Earth reentry module containing the lunar specimens. In many ways, the robotic milestones required for this phase of China’s lunar exploration initiative mirror those of the Apollo human landing program.
Please go to my newly posted Space.com story:
China wants a piece of the moon. Here’s how it plans to handle lunar samples.

