Archive for January, 2018

On the floor with InSight during solar array test. Shameless selfie!
Credit: Leonard David
Littleton, Colorado – NASA’s next Mars mission is reaching “ship and shoot” status, a lander geared this year to start probing the Red Planet’s deep interior and even eavesdrop on rumbling Marsquakes.
As spacecraft names go, it’s a mouthful: Interior Exploration using Seismic Investigations, Geodesy and Heat Transport. That has been mercifully shortened to InSight.

Credit: Lockheed Martin
A wonderful moment early this morning for Barbara and myself at Lockheed Martin Space Systems – the unfurling of the solar arrays on the InSight Mars spacecraft.

Barbara on photo shoot with InSight Mars lander.
Credit: Leonard David
Technicians took great care in monitoring the deployment of the solar panels, a final test before being reeled back in on the Mars-bound craft.
The InSight Mars lander is nearing its Colorado departure to Vandenberg Air Force Base in California.
Liftoff of the spacecraft is targeted for May 5th!
On hand for solar array deployment testing: Bruce Banerdt, InSight Principal Investigator at NASA’s Jet Propulsion Laboratory (JPL), Pasadena, California.
Credit: Leonard David
Also, here is a video from today’s solar array deployment test:
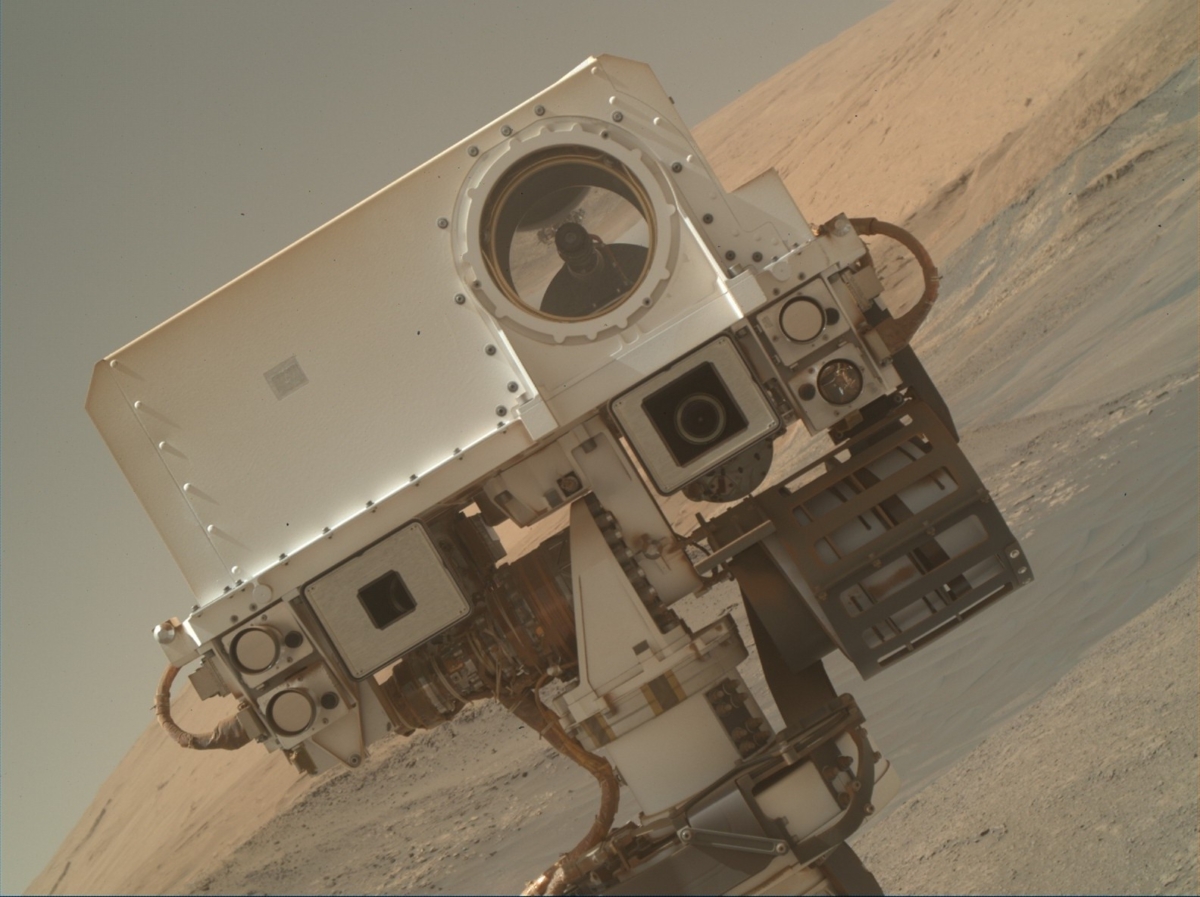
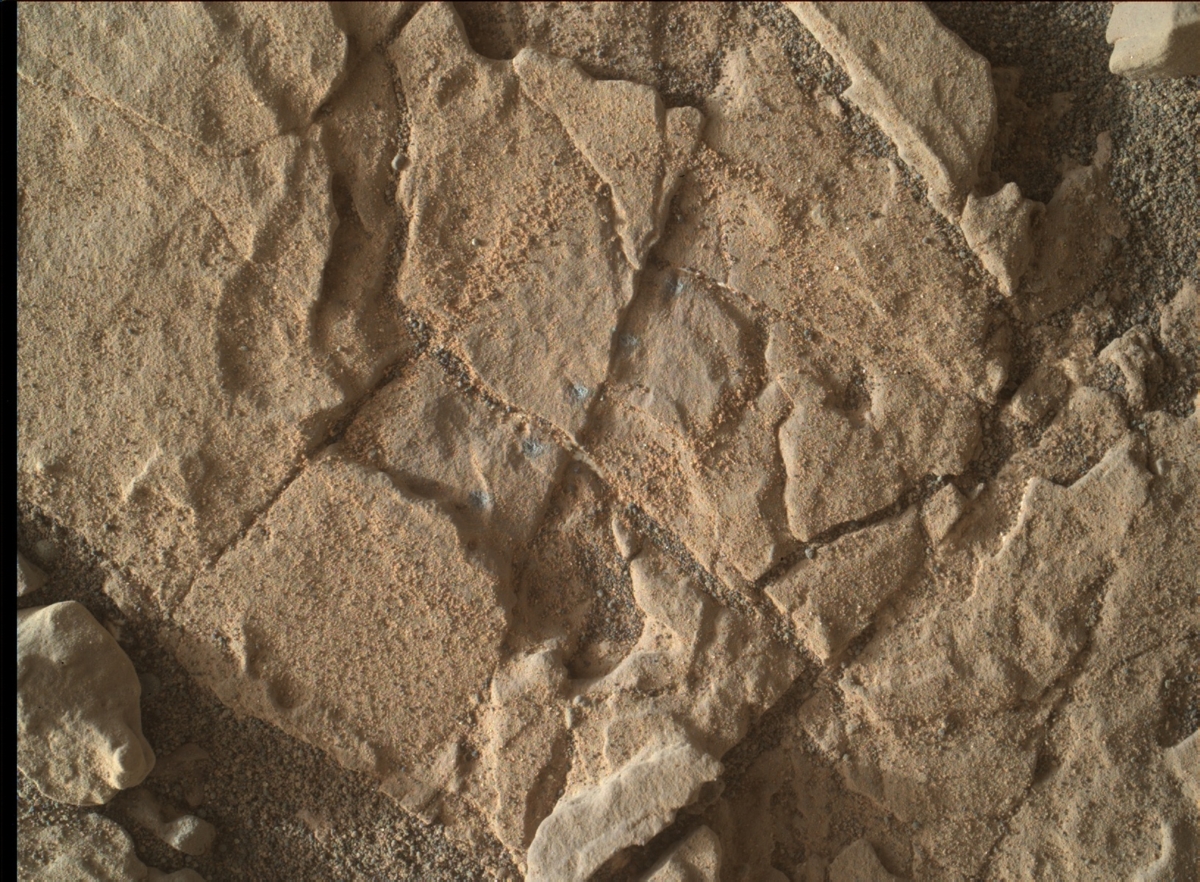
Selfie satisfaction. Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech/MSSS
Over the weekend Curiosity completed a drive that took the robot to the very southern edge of Vera Rubin Ridge (VRR), reports Roger Wiens, a geochemist at the Los Alamos National Laboratory in New Mexico. “So we have downhill slopes directly in front of and around the side of the rover, though we plan to continue exploring the ridge for a while,” he adds.
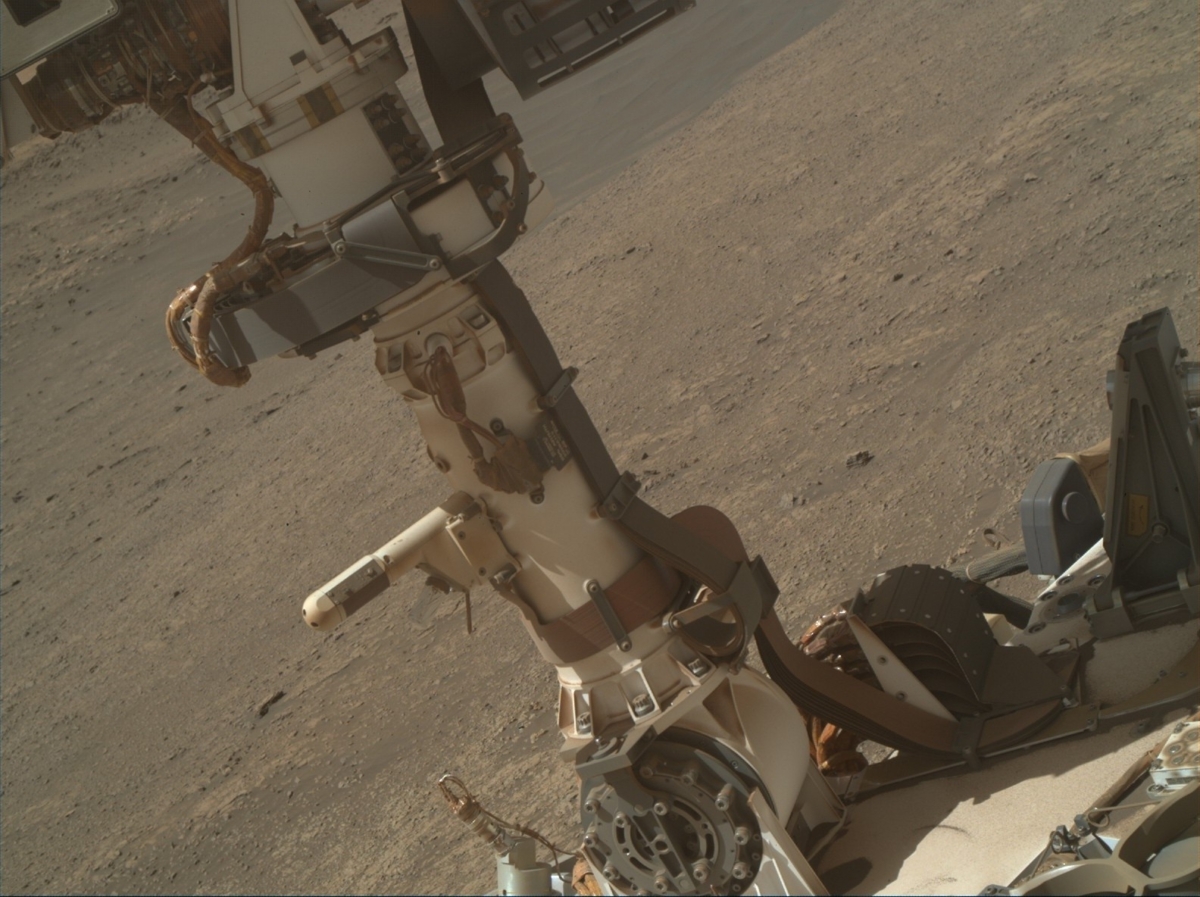
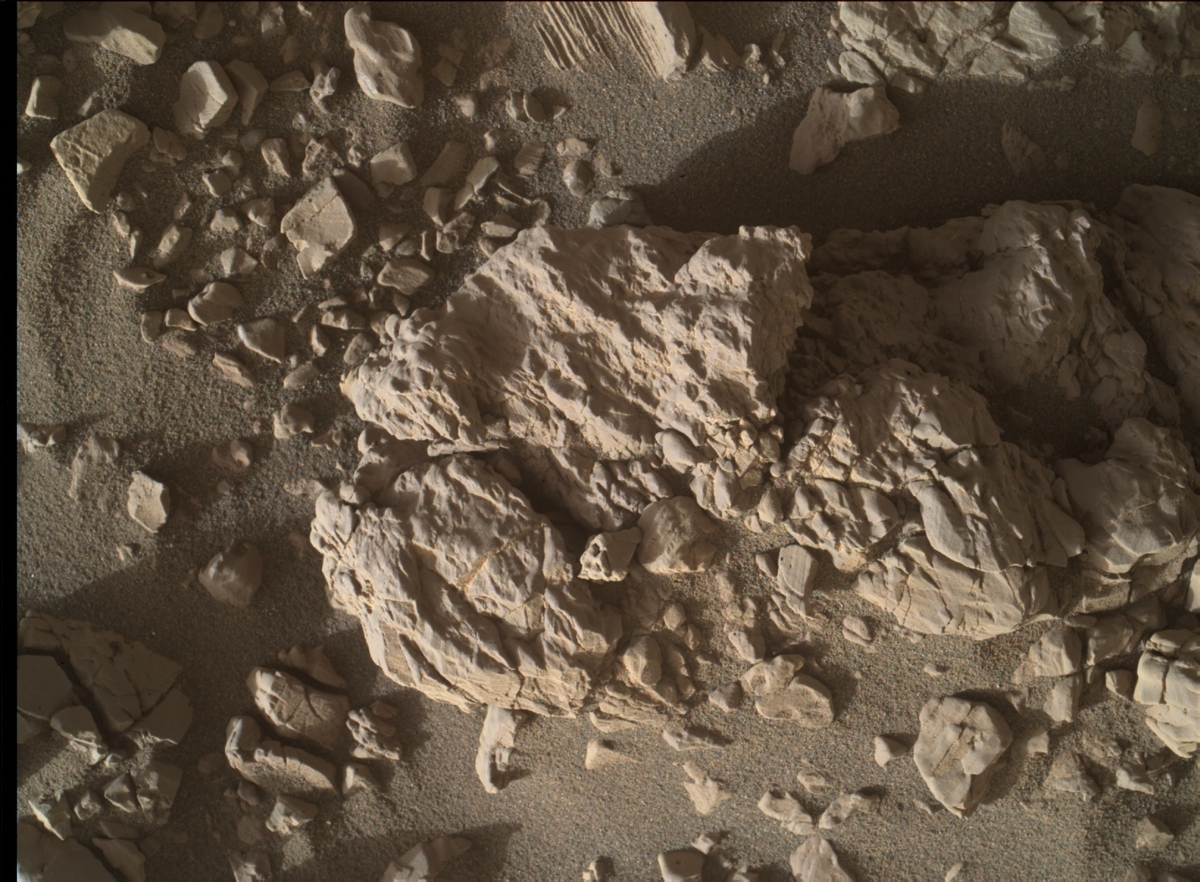
Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech/MSSS
The rover team is using the images gleaned over the weekend to look for potential geological relationships between VRR and the clay unit that lies south of it, explains Wiens.
New selfie coming!
A newly written plan calls for the rover to take its first selfie since Sol 1466 (at the Quela drill site) back in September, 2016, and with the Murray Buttes in the scene.
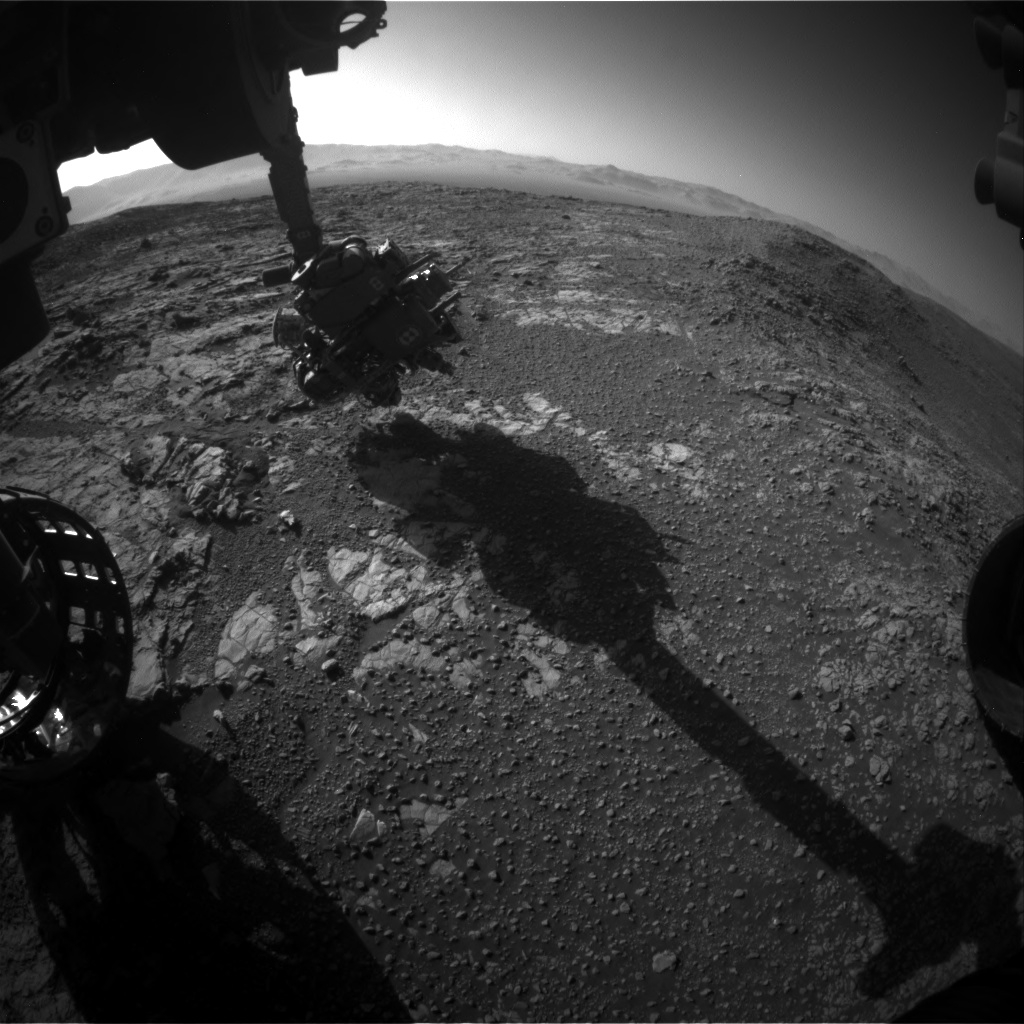
Curiosity Front Hazcam Left B image acquired on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech
Curiosity’s to-do list also includes taking a close-up of the Remote Warm Electronics Box (RWEB) window that ChemCam looks out of – a check for dust. “So far the window has been very clean throughout the mission; this is just another routine check,” Wiens notes.
The robot’s Chemistry and Camera (ChemCam) is slated to do a 5×1 raster on “Foyers” and a 10×1 raster on “Eaval,” and Mastcam will image these targets too.
Also, the Alpha Particle X-Ray Spectrometer (APXS) will take advantage of the dust removed from “Eaval” by ChemCam’s laser, and will do an overnight observation on that target, which will also be imaged by the rover’s Mars Hand Lens Imager (MAHLI).
Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech/MSSS
In addition, the robot will take Dynamic Albedo of Neutrons (DAN) passive data and also Radiation Assessment Detector (RAD) and Rover Environmental Monitoring Station (REMS) data.
Straight south
On the next sol, Curiosity’s Mastcam will take a 12×2 mosaic of “Glen Tilt.” ChemCam will take passive spectra of several calibration targets on the rover, Wiens points out.
Curiosity Navcam Left B photo taken on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech
After that, the rover will spend 13 minutes driving about 82 feet (25 meters) nearly straight south, Wiens concludes, taking a short dip off the ridge. The rover will finish by taking images from its new position and sending the data home.
6th Earth year on Mars
“Having spent 1943 sols on the surface of Mars, Curiosity is in its 6th Earth year on Mars, but it is in its 3rd Mars year of exploration,” Wiens explains. “That means Curiosity has encountered this season of the year twice before.”
The Mars machinery is just a little past the deepest part of winter in the southern hemisphere, where Curiosity roams.

Curiosity Rear Hazcam Right B image acquired on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech
Day in history
“On this day in history in Mars year 32 (which happened to be 19-April-2014 on Earth), Curiosity was just arriving at the Kimberley site, where she found manganese-oxide fracture fills and sanidine-rich sediments,” Wiens continues.
Curiosity Mastcam Left image taken on Sol 1942, January 22, 2018.
Credit: NASA/JPL-Caltech/MSSS
“And on this day one Mars year ago (March 6, 2016), Curiosity was climbing onto the Naukluft Plateau, starting to round the corner after its first encounter with the Bagnold Dunes, and prior to encountering the Murray Buttes,” Wiens says. “What a journey it has been for this intrepid rover!”

Navcam Right B image acquired on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech

Blue Origin’s New Shepard booster takes flight.
Credit: Blue Origin
A new space tourism market report is forecasting growth at the Compound Annual Growth Rate (CAGR) of 14.34 percent from 2017-2021.
For years, space tourism was an option only for the richest of the population ever since Dennis Tito went on a commercial orbital space tour in 2001.
Since that time, nine more people have taken up 10 such tours, spending a minimum of $20 million on each trip. These people have been categorized under the first generation of space tourists.
Growth prospects
The new report covers the present scenario and the growth prospects of the global space tourism market for 2017-2021. To calculate the market size, the report considers the investment made in commercial space tourism services.
Technavio’s analysts forecast the global space tourism market to grow at a CAGR of 14.34% during the period 2017-2021. The report covers the market landscape and its growth prospects over the coming years. The report also includes a discussion of the key vendors operating in this market.
Technavio is a market research company with global coverage.

Credit: Space Adventures/NASA
Latest trend
One of the latest trends that will gain traction in the space tourism market in the coming years, the study group has noted, is the decrease in the cost of space tourism.
“The cost of getting into space will decline rapidly if the next generation of space planes can reach the orbit. This will considerably reduce the cost of launching satellites or space exploration missions, making it an economically feasible option for a larger customer segment.”

Virgin Galactic’s VSS Unity in trial run for creating suborbital space travel.
Credit: Virgin Galactic
Limited number of vendors
The space tourism market, however, is a niche market with a limited number of vendors.
The market is still in its development stage where companies are trying to enhance their spaceflight technology. Growing competition, rapid advances in technology, frequent changes in government policies, public consequence, and environmental regulations are currently the major factors that challenge the growth of the players in this global market, explains the group.
For more information on this report, go to:

Credit: CSIS
The Center for Strategic and International Studies (CSIS) held on January 18 a discussion by experts focused on creating a more resilient civil space architecture.
CSIS is a bipartisan, nonprofit policy research organization dedicated to providing strategic insights and policy solutions to help decision makers chart a course toward a better world.
Top priorities
The Trump Administration has emphasized civil and commercial space as one of its top priorities with the reinstatement of the National Space Council, the signing of Space Policy Directive 1, and the recent National Security Strategy, which prioritized the improvement of our U.S. space architecture resiliency.
The Administration’s renewed focus on civil space requires a broader public discussion on America’s current civil space systems and how best to improve their resilience.
En Route to the Moon will focus on how NASA and others can promptly adapt civil space architectures in pursuit of the Administration’s mission objectives.

Credit: CSIS
Discussion experts
Among topics detailed: Threats and vulnerabilities for civil space system, navigation and timing lessons for civil space; resiliency in commercial space launch; new perspectives in civil space policy; as well as discussion of disruptive technologies.
Speakers included Sean O’Keefe, Distinguished Senior Adviser, CSIS, and former NASA Administrator; Kathryn White, Senior Vice President and General Manager, MITRE Public Sector; Renee Wynn, Chief Information Officer, NASA; Brian Weeden, Director of Program Planning, Secure World Foundation; and Zachary Goldstein, Chief Information Officer, NOAA; Dan Hart, President and CEO, Virgin Orbit; Tom Study, Vice President and General Counsel, United Launch Alliance; and Josh Brest, Senior Director for Government Business, Space.
To video view the meeting, go to:

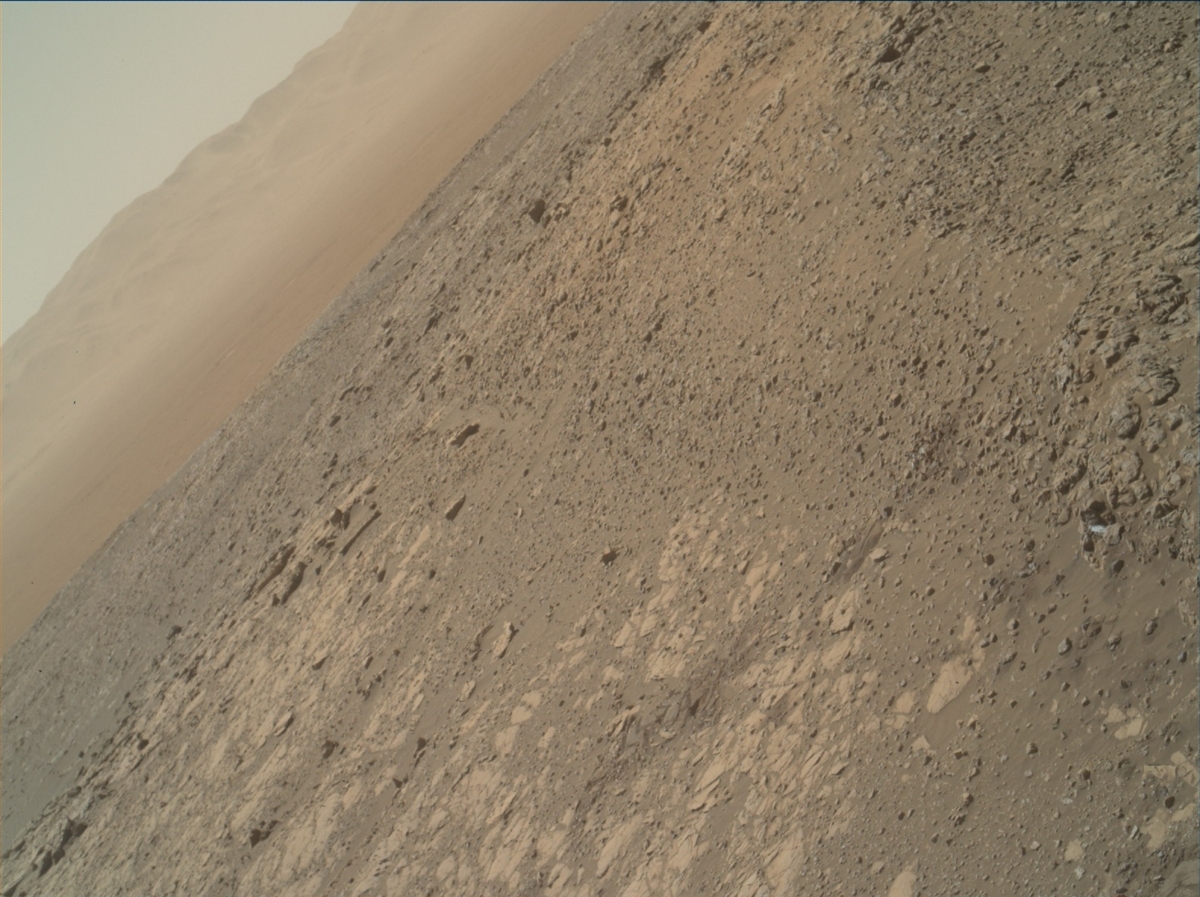
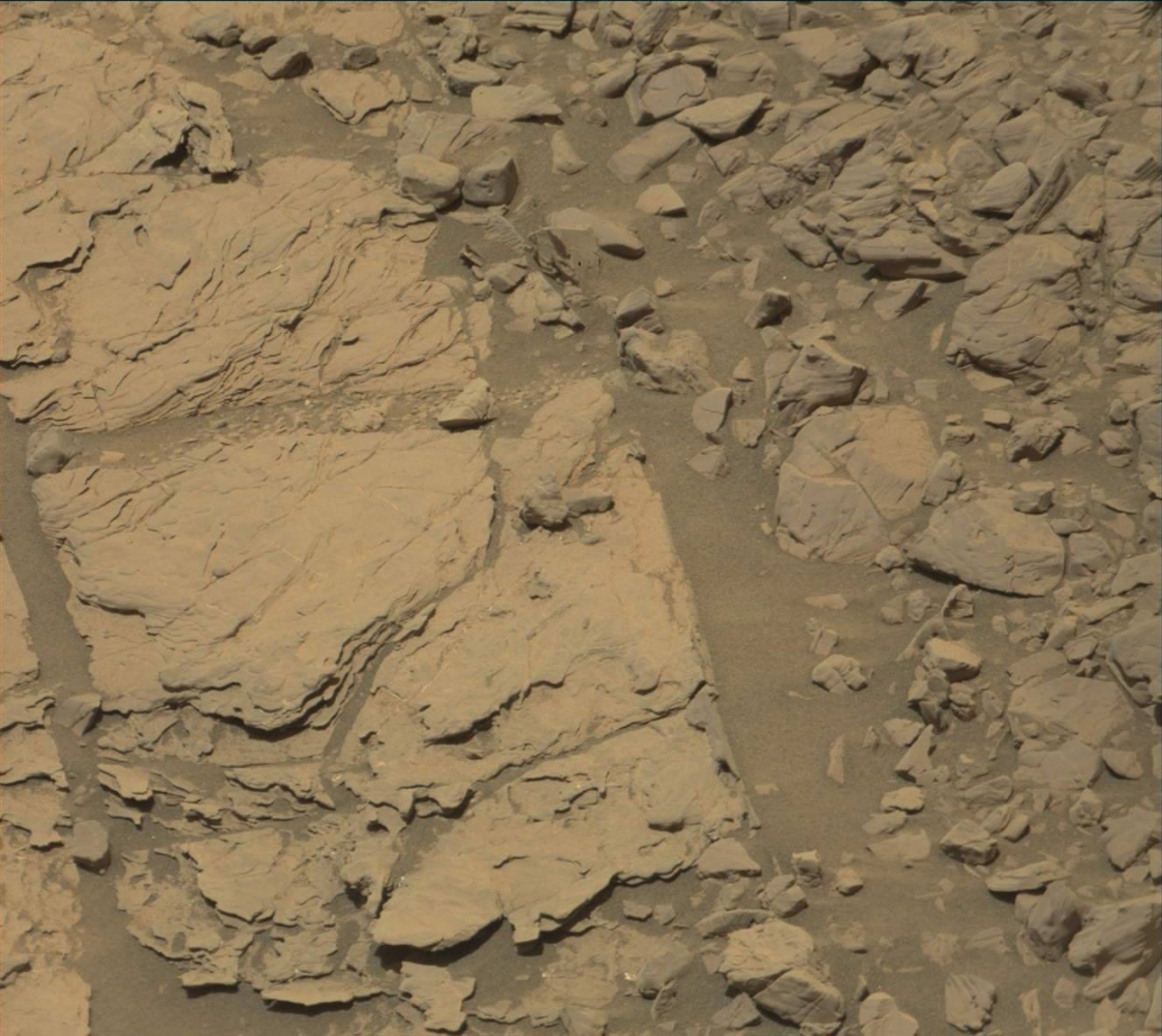
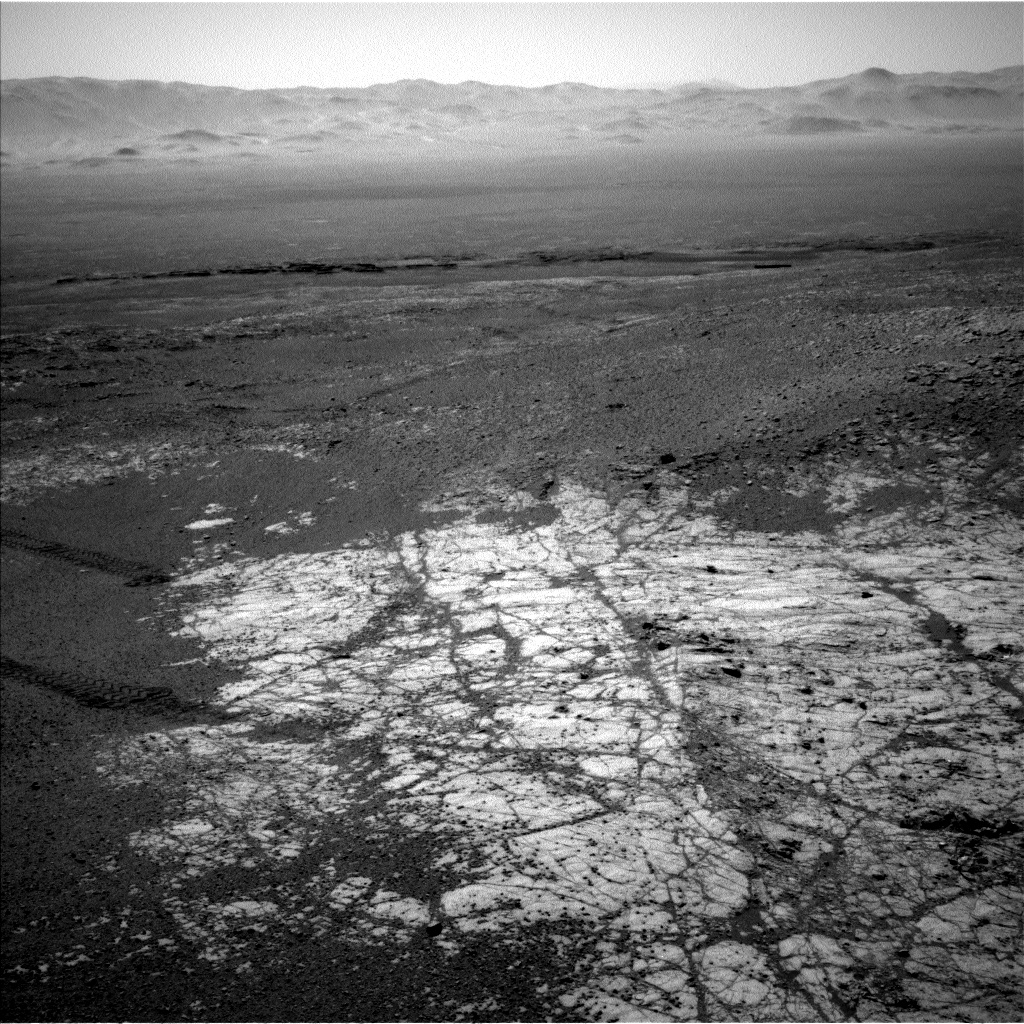
Curiosity Mastcam Right image taken on Sol 1939, January 19, 2018.
Credit: NASA/JPL-Caltech/MSSS
Now performing duties in Sol 1941, NASA’s Curiosity Mars rover is busy studying bedrock transition to better understand the textural and chemical changes across this transition.
Reports Ken Herkenhoff, a planetary geologist for the USGS in Flagstaff, Arizona, the robot performed a drive on Sol 1939, placing it next to the bright/dark transition territory.
Curiosity Front Hazcam Right B image taken on Sol 1940, January 20, 2018/
Credit: NASA/JPL-Caltech
On the plan is use of Curiosity’s Chemistry and Camera (ChemCam) and Right Mastcam observations of targets “Mallaig” and “Criffel.”
Multispectral mosaics
The rover’s Mastcam will also acquire multispectral mosaics of the transition and of the material toward the south, Herkenhoff adds, material that shows evidence for clays in orbital data. Also on tap, the robot will produce smaller mosaics of nearby bedrock target “Fetlar” and the more distant “Hallival” target, and images of the Sun and the crater rim to measure the amount of dust in the atmosphere.

Curiosity Navcam Left B image acquired on Sol 1940, January 20, 2018.
Credit: NASA/JPL-Caltech
Herkenhoff adds “that’s just the beginning!”
On the darker side
On Sol 1940, the script called for Curiosity’s robotic arm to be deployed to acquire full suites of Mars Hand Lens Imager (MAHLI) images of “Knoydart,” a block on the darker side of the transition, and of Mallaig.
Also, the robot’s Alpha Particle X-Ray Spectrometer (APXS) will be placed on Mallaig for a short integration, then on Knoydart for a longer, overnight integration.
Curiosity Mars Hand Lens Imager (MAHLI) taken on Sol 1940, January 20, 2018.
Credit: NASA/JPL-Caltech/MSSS
Cleaning/maintenance activity
The Sol 1941 plan is dominated by a cleaning/maintenance activity of Curiosity’s Sample Analysis at Mars (SAM) Instrument Suite – a task that requires significant power.
“Early in planning we expected that power would constrain the number of activities that we could plan, but in the end all of the requested scientific observations made it into the plan,” Herkenhoff notes.
Curiosity Mars Hand Lens Imager (MAHLI) taken on Sol 1940, January 20, 2018.
Credit: NASA/JPL-Caltech/MSSS
Busy weekend
On the books for Sol 1942, the Mars machinery is slated to drive toward the southeast and acquire the usual post-drive imaging needed for Monday planning, Herkenhoff explains. Then Navcam will search for dust devils and clouds and the Mars Descent Imager (MARDI) will snap another image of the ground near the left front wheel during evening twilight.
Curiosity Mastcam Right image taken on Sol 1940, January 20, 2018.
Credit: NASA/JPL-Caltech/MSSS
Finally, early on Sol 1943, Navcam will again search for clouds and Mastcam will measure dust opacity in the atmosphere.
“It’s looking like another busy weekend” for Curiosity, Herkenhoff concludes.
Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 1940, January 20, 2018.
Credit: NASA/JPL-Caltech/LANL

Rocket Lab’s “Still Testing” booster departs New Zealand pad, heading to Earth orbit.
Credit: Rocket Lab
Upstart booster provider, Rocket Lab, successfully reached orbit with the test flight of its second Electron orbital launch vehicle, “Still Testing.”
Electron lifted-off January 21 from Rocket Lab Launch Complex 1 on the Māhia Peninsula in New Zealand.

In-flight photo from Electron booster showing New Zealand launch area.
Credit: Rocket Lab
Customer payloads
Still Testing was carrying a Dove Pioneer Earth-imaging satellite for launch customer Planet, as well as two Lemur-2 satellites for weather and ship tracking company Spire.
Rocket Lab’s commercial phase will see Electron fly already-signed customers including NASA, Spire, Planet, Moon Express and Spaceflight.

Rocket Lab’s New Zealand launch site.
Credit: Rocket Lab
Opening access to space
Roaring skyward from its New Zealand pad, and after first and second stage burns, Electron reached orbit and deployed customer payloads at 8 minutes and 31 seconds after lift-off.

Launch site in the Mahia Peninsula.
Credit: Rocket Lab
“Reaching orbit on a second test flight is significant on its own, but successfully deploying customer payloads so early in a new rocket program is almost unprecedented,” says Rocket Lab CEO and founder Peter Beck.
“Rocket Lab was founded on the principal of opening access to space to better understand our planet and improve life on it. Today we took a significant step towards that,” Beck adds in a Rocket Lab press statement.
Go to this video to see launch, staging events, mission control:

Credit: Georgia Tech
A retro-reflective look at Apollo moonwalking in 1969-1972 has found that despite their best efforts, the astronauts consistently demonstrated the challenges of keeping to schedule.
Georgia Institute of Technology researchers analyzed the archived mission reports from the Apollo moonwalks to see how well moonwalkers were able to stick to their expected timelines during extravehicular activities (EVAs).
The Georgia Tech team also examined life support systems — oxygen, power and water consumption levels — to see if the relationships between NASA’s pre-flight estimates and timeline performance were accurate.

Credit: NASA
Consumable usage
“Most of that time was lost when trying to walk or drive across the lunar surface,” said Karen Feigh, an associate professor in Georgia Tech’s Daniel Guggenheim School of Aerospace Engineering. “Only one of the 11 EVAs we analyzed, Apollo 15’s first moonwalk, finished ahead of schedule — and most of it was behind schedule until the end.” That mission was the first to utilize a moon rover for increased mobility.
As for life support systems, predicted consumable usage estimates were underestimated by as much as 20 percent compared to what was actually required by the crew to complete the EVA.

Click the image above to view the full-sized timeline of all 6 Apollo moon landing missions.
Credit: Georgia Tech
Exploration-class
Feigh and the Georgia Tech team looked at all EVAs during Apollo 15, 16 and 17, which represent the exploration-class EVAs performed during the Apollo program.
“These missions serve as the only precedence to help understand and guide future exploration EVA programs, including NASA’s `Journey to Mars’ program,” said Matthew Miller, who wrote the report as a doctoral aerospace engineering student at Georgia Tech.
“The synthesis of timeline execution and life support trends from Apollo captured in this study,” Miller notes in a university press statement, “provides realistic bounds on what future exploration missions might likely face.”
Computer timeline management system
The research was presented to NASA as a technical paper which has been reviewed and archived by the organization. Miller compiled a portion of the data and worked alongside NASA engineers as part of his NASA Space Technology Research Fellowship (NSTRF) at the Johnson Space Center.
In addition to the analysis of the mission reports, the researchers used the data to help inform the development and simulation of a computer timeline management system. This system served as a prototype for a new way of calculating how far ahead or beyond astronauts get while performing EVAs by integrating life support system performance and timeline execution trends.
This effort contributes to the goal of making EVAs more efficient and predictable in anticipation of future surface missions well beyond the Moon.
Message for Marswalkers
During the Apollo missions, the crew was in radio contact with mission control in Houston, which kept track of the clock and communicated schedule adjustments in real time. That won’t be possible when astronauts land on Mars.
“Communication delays will be too extreme to rely on mission control,” said Feigh. “Astronauts will have to depend on the crew inside the spacecraft to monitor their progress during EVAs.”

Credit: NASA
Resources
Full-sized timeline of all 6 Apollo moon landing missions, go to:
http://www.news.gatech.edu/sites/default/files/pictures/moon-walks-timeline.png
For a copy of the final report — Operational Assessment of Apollo Lunar Surface Extravehicular Activity – go to:
https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20170007261.pdf
Also, go to a Georgia Tech lunar landing logs website at:

Curiosity Front Hazcam Right B image acquired on Sol 1939. January 19, 2018.
Credit: NASA/JPL-Caltech
Now in Sol 1939, NASA’s Curiosity Mars rover is wrapping up science duties, busily exploring Vera Rubin Ridge location “e,” reports Lauren Edgar, a planetary geologist at the USGS in Flagstaff, Arizona.
Scientists are excited looking over the robot’s Chemistry and Camera (ChemCam) data, Edgar notes, seeing that the instrument did a great job with some very precise pointing in the previous plan.

Curiosity Navcam Right B photo taken on Sol 1939, January 19, 2018.
Credit: NASA/JPL-Caltech
Focused on small-scale features
“At location ‘e’ we have been focused on understanding small-scale features, like the tiny crystals and veins seen,” Edgar explains. The plan now in place has Curiosity complete the detailed work on this outcrop, and then it will “bump” to a new location to assess a transition from gray to red bedrock.
Curiosity Navcam Left B image acquired on Sol 1939, January 19, 2018.
Credit: NASA/JPL-Caltech
A two-sol plan has Curiosity acquiring four more carefully pointed ChemCam observations to assess compositional variations in bedrock, a vein, and dark nodules, along with supporting Mastcam documentation.

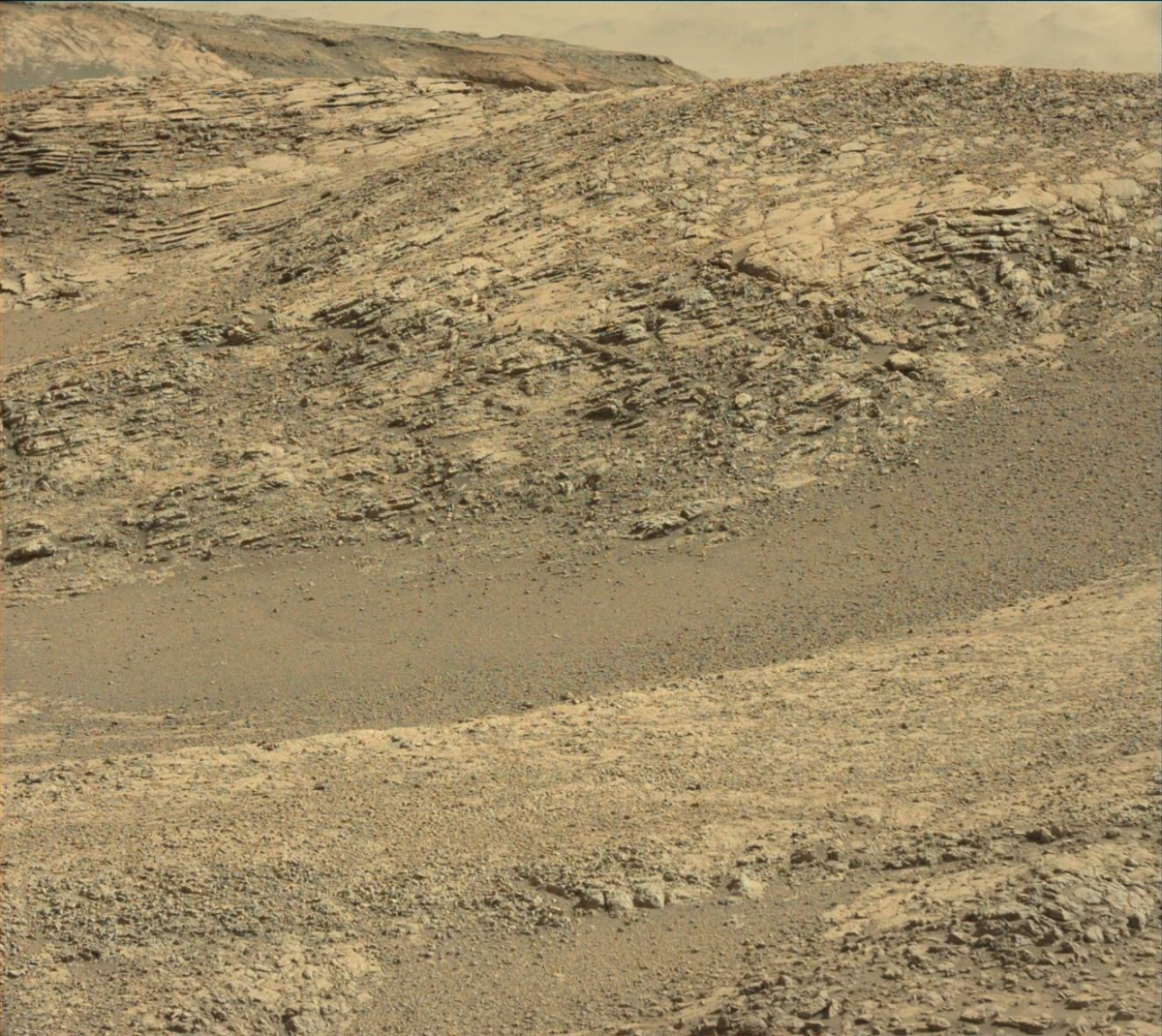
Curiosity Mastcam Right image taken on Sol 1937, January 17, 2018.
Credit: NASA/JPL-Caltech/MSSS
Funzie and Rona
Then the rover was slated to acquire Mars Hand Lens Imager (MAHLI) images of the target “Funzie,” and one more MAHLI image on “Rona” to assess small textural differences in the bedrock and veins that are present, Edgar points out.
Just for “Funzie,” the rover is to carry out an overnight Alpha Particle X-Ray Spectrometer (APXS) analysis. On the second sol, Curiosity’s to-do activities include acquiring a Mastcam multispectral mosaic of the area that the wheeled robot is bumping towards. Doing so will allow scientists to better understand the color differences and the transition from gray to red bedrock in this area.

NASA’s Mars Odyssey orbiter.
Credit: NASA/JPL-Caltech
Curiosity ChemCam Remote Micro-Image taken on Sol 1938, January 18, 2018.
Credit: NASA/JPL-Caltech/LANL
Bump forward
Curiosity is set to drive roughly 16 feet (5 meters) to the south to set up for contact science in the weekend plan, Edgar reports.
“The plan also includes a number of environmental monitoring observations to look for clouds and variations in dust in the atmosphere,” Edgar adds.

Curiosity Mars Hand Lens Imager (MAHLI) used an onboard focusing process, creating this product by merging two to eight images previously taken by the MAHLI. Image produced on Sol 1939, January 19, 2018.
Credit: NASA/JPL-Caltech/MSSS
Odyssey observation
One of the Mastcam atmospheric observations is coordinated with a Mars Odyssey Thermal Emission Imaging System (THEMIS) observation.
NASA’s Mars Odyssey has been orbiting the Red Planet since October 2001. The THEMIS observation, Edgar concludes, “is pretty cool,” when thinking about multiple spacecraft studying Mars from the ground and orbit.
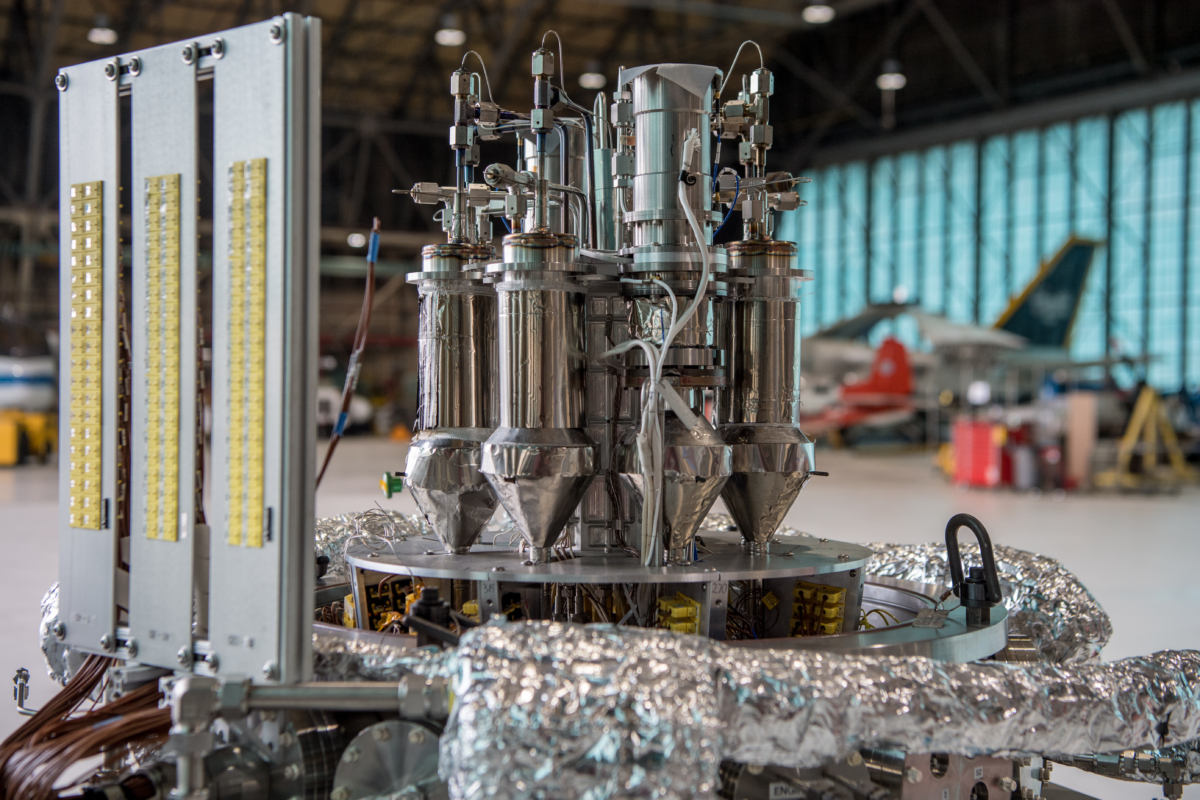
Kilopower project is geared for reaching a number of milestones over the next few months.
Credit: NASA
NASA is pushing forward on testing a key energy source that literally “empowers” human crews on the near-by Moon and distant Mars, energizing habitats and running on-the-spot processing equipment to transform local resources into oxygen, water, and fuel.
The space agency’s Space Technology Mission Directorate (STMD) has provided multi-year funding for the Kilopower project. This work is viewed as a stepping stone to small fission-powered planetary science missions.
Safe, efficient and plentiful energy
NASA and its partners on the Kilopower work hosted a news conference today, held at the National Atomic Testing Museum in Las Vegas. They discussed a recent experiment involving a new power source that could provide the safe, efficient and plentiful energy needed for future robotic and human space exploration missions.
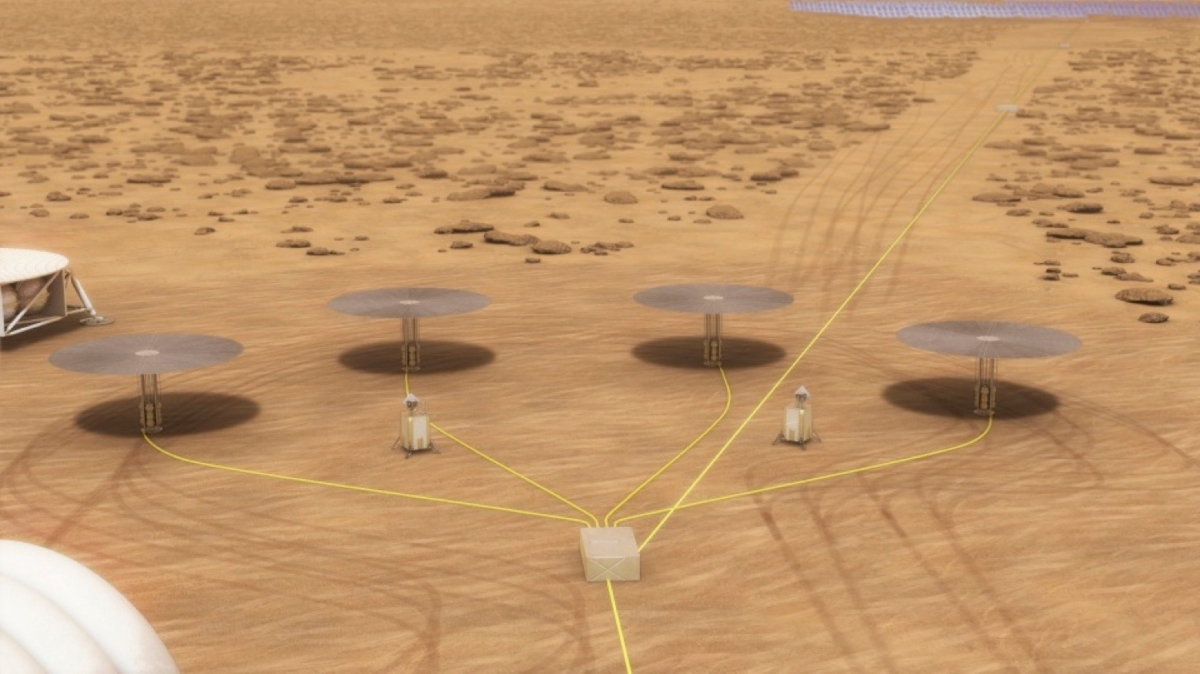
NASA Kilopower project is viewed as a stepping stone to small fission-powered planetary science missions.
Credit: NASA
That Kilopower project is part of NASA’s Game Changing Development program and is led by the agency’s Glenn Research Center, in partnership with NASA’s Marshall Space Flight Center in Huntsville, Alabama, Los Alamos, NNSS and the Y-12 National Security Complex.
Kilopower project testing began in November 2017 and is expected to continue through March,
Confidence builder
“The Kilopower test program will give us confidence that this technology is ready for space flight development. We’ll be checking analytical models along the way for verification of how well the hardware is working,” explains Lee Mason, STMD’s Principal Technologist for Power and Energy Storage at NASA Headquarters.
There has been strong leveraging of DOE/National Nuclear Security Administration infrastructure and expertise, Mason points out, as well as tapping the talents of Los Alamos National Laboratory technologists in New Mexico. NASA’s Glenn Research Center in Cleveland, Ohio built the test unit. The Y12 National Security Complex in Oak Ridge, Tennessee is providing the reactor core.
Multiple near-term missions
“A space nuclear reactor could provide a high energy density power source with the ability to operate independent of solar proximity or orientation and the ability to operate in extremely hostile environments, such as the Martian surface,” notes Patrick McClure, Project Lead on the KiloPower work at the Los Alamos National Laboratory (LANL).

Credit: LANL/NASA
“The reactor technology we are testing is applicable to multiple near-term missions, and we ultimately hope that this is the first step for fission reactors to create a new paradigm of truly ambitious and inspiring space exploration,” adds David Poston, LANL’s Chief Reactor Designer. “Simplicity is essential to any first-of-a-kind engineering project – not necessarily the simplest design, but finding the simplest path through design, development, fabrication, safety, and testing.”
Achievable objective
Moving the power source from ground-testing into a space system is an achievable objective, Mason says. “The upcoming Nevada testing will answer a lot of technical questions to prove out the feasibility of this technology, moving it to a Technical Readiness Level of 5. It’s a breadboard test in a vacuum environment, operating the equipment at the right conditions,” he advises.
Looking into the future, Mason suggests that the technology would be ideal for furthering lunar exploration objectives too. “The technology doesn’t care. Moon and or Mars, this power source is agnostic to those environments.”

Credit: LANL/NASA
Lunar campaign
“A moon mission for Kilopower would be ideal,” Mason told Inside Outer Space. “It has the potential to power lander payloads through the lunar night, and possibly for months or years. The power level would be suitable to access, extract, and process lunar ice in permanently shadowed craters and demonstrate propellant production. NASA could also co-develop the system with commercial lunar lander companies that supply power to mining ventures or small settlements,” he envisions.
A successful lunar campaign, Mason said, “would give us confidence for later Mars missions in which humans would depend on Kilopower to make their return propellant and power their habitats.”
Listen-in
To give an ear to today’s review of the Kilopower project held at the National Atomic Testing Museum in Las Vegas, Nevada – power up your phone fingers and dial:
1-800-944-3498
Also, go to this Los Alamos National Lab’s video at:

Curiosity Front Hazcam Left B image acquired on Sol 1937, January 17, 2018.
Credit: NASA/JPL-Caltech
Now in Sol 1938, NASA’s Curiosity rover is continuing its up-close looks at features of Vera Rubin Ridge.
Positioned in location “e,” “it certainly seems that ‘e’ should stand for ‘exciting,’ as we’ve collected quite a rich set of observations at this location, including extensive imaging and geochemical analyses,” reports Rachel Kronyak, a planetary geologist at the University of Tennessee in Knoxville.

Curioisty Navcam Left B photo taken on Sol 1937, January 17, 2018.
Credit: NASA/JPL-Caltech
Small-scale features
In recent planning, the Mars robot has focused its attention on small-scale features in the rocks in front of the rover to try and understand how they formed.
The script called for Curiosity to carry out a long science block in the early afternoon, during which it was slated to use its Chemistry and Camera (ChemCam) to assess the targets “Macleans Nose 2,” “Funzie 2,” and “Ullapool.”
Repeat observations
“The targets with ‘2’ in their name are intended to be repeat observations of targets that we analyzed over the weekend to gather additional information,” Kronyak explains.
“We’ll then take a small Mastcam mosaic,” Kronyak adds, “to document some of the Vera Rubin Ridge terrain further away from the rover.”

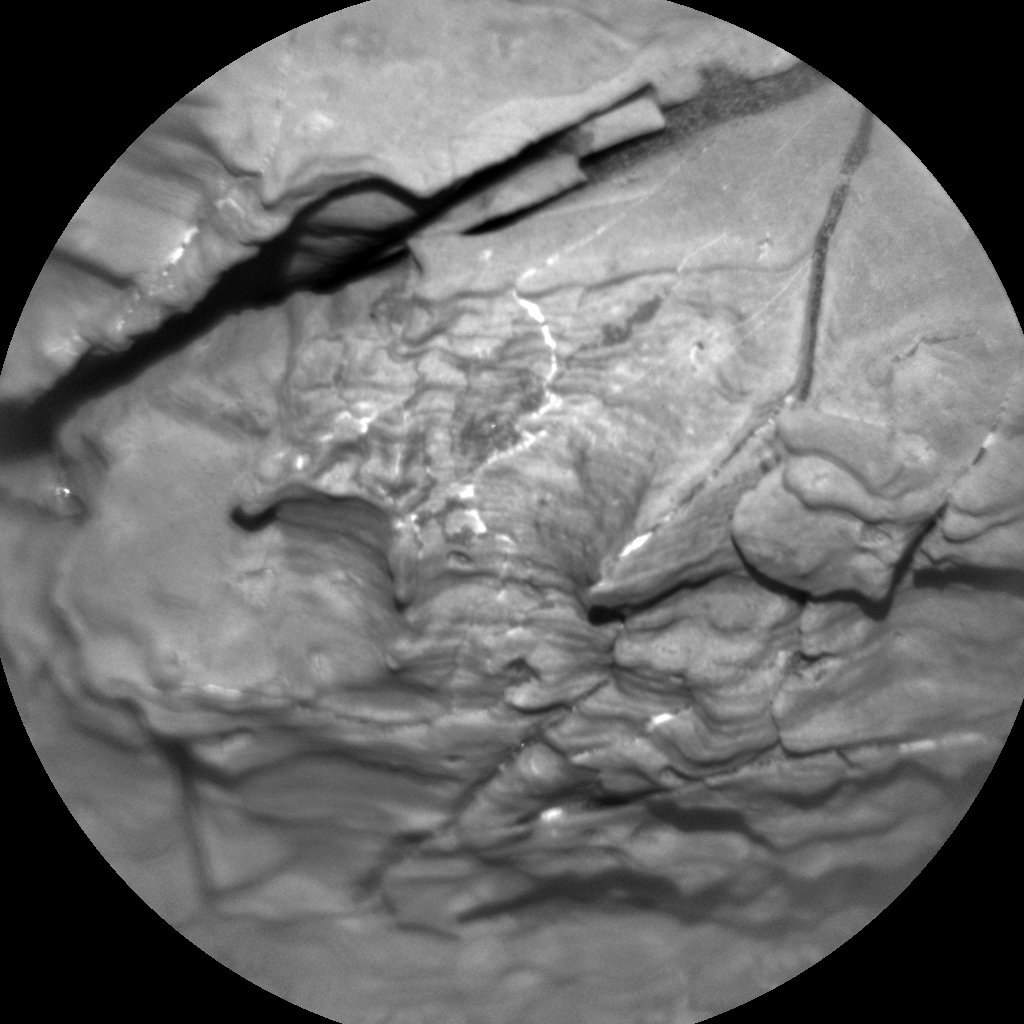
Curiosity Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, acquired this image on Sol 1937, January 17, 2018.
Credit: NASA/JPL-Caltech/MSSS
Large white vein
Following the science block, the plan calls for deployment of the robotic arm to take a closer look at some interesting rock features, Kronyak adds.

Curiosity Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, acquired this image on Sol 1937, January 17, 2018.
Credit: NASA/JPL-Caltech/MSSS
The first is “Rona,” a beautiful large white vein. The rover’s Mars Hand Lens Imager (MAHLI) is on tap to take a series of high-resolution images of the vein to look at its interior, along with an APXS observation to see what the vein is made out of.
Finally, the schedule calls for taking additional MAHLI images of the target “Loch Maree,” a patch of dark gray material, Kronyak reports.


{kind=link}