Archive for January, 2018

Credit: ESA/NASA
Earth’s celestial neighbor in gravitational lock – the moon — is far from being a “been there, done that world.” The scientific study of the moon, by robots and humans, is a “barely scratched the surface” enterprise.
Yes, between 1969 and the close of 1972, a dozen American moonwalkers strutted their Apollo right stuff across stretches of desolate, crater-pocked landscape. But now, over 45 years later, there’s a rising tide of multiple nations casting their eyes on moon return, among them, Europe, China, Russia, Japan, and India.

Inside look at one idea the European Space Agency is exploring in its formulation of a “Moon Village” that incorporates 3D printing.
Credit: ESA/ Foster + Partners
Trump directive
Not to be left behind in the lunar dust, NASA’s 2019 budget proposal to be released in February may well scope out details about how the agency plans to realize a new President Trump directive to retarget humans to the moon.
On the table, a crew-tended spaceport in cislunar space called the Deep Space Gateway, or DSG, an astronaut crewed node to gain access to the lunar surface and one that serves as a stepping stone to further deep space exploits.

Notional Deep Space Gateway.
Credit: NASA
After almost a half-century hiatus, lunar missions are once again becoming the next big thing in space science and exploration.
For my new Scientific American story on future Moon exploration, go to:
Shooting for the Moon–This Time to Stay
https://www.scientificamerican.com/article/shooting-for-the-moon-this-time-to-stay/
Credit: SpaceWorks Enterprises, Inc.
A new marketing forecast projects that as many as 2,600 nano/microsatellites will require launch over the next 5 years.
SpaceWorks Enterprises, Inc. (SEI) released today its annual nanosatellite and microsatellite market forecast.
According to an SEI press statement, compared with last year’s Nano/Microsatellite forecast, the current projections have been increased to reflect an increase in small satellite launch opportunities, the continued maturation of emerging small satellite operators, and a strong influx of venture capital financing into the space sector.
Analysis of trends by application suggests that Earth observation and remote sensing will remain the primary use for nano/microsatellites in the near term.
Record setting year
“2017 was a record setting year for the small satellite market, significantly reducing the satellite backlog that has been building since 2015,” explains Caleb Williams, SpaceWorks Space Systems Analyst.
“This year the global launch industry showed broader acceptance of small satellite rideshares and demonstrated its ability to accommodate near-term market demand even while small satellite launch vehicles continue to mature,” Caleb adds. “Ultimately the future of the small satellite market will depend largely on the ability of operators to secure capital and create sustainable customer relationships.”

Credit: SpaceWorks Enterprises, Inc.
Free resource
The 2018 market forecast from SEI is available in presentation form as a free download on the SpaceWorks newly updated commercial website at:

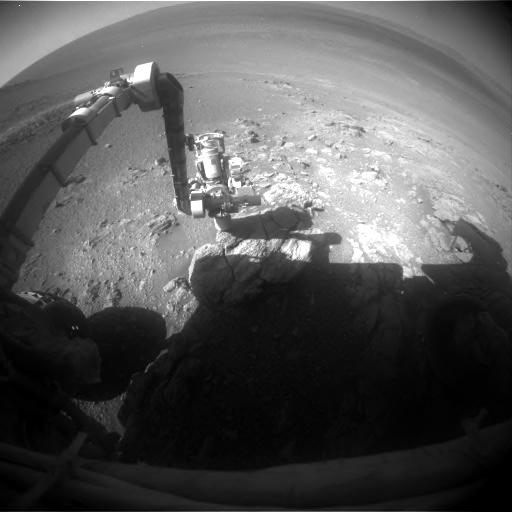
Curiosity Front Hazcam Right B image taken on Sol 1949, January 29, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover on Mars has just started to perform Sol 1950 duties.
“We are back on Vera Rubin Ridge today after a short diversion into the phyllosilicate unit,” reports Abigail Fraeman, a planetary geologist at NASA/JPL in Pasadena, California.
Detailing Curiosity duties for Sol 1950-1951: “Our workspace this morning contained rocks in various shades of red,” Fraeman notes. “The remote sensing and contact science observations we planned today are designed to investigate the chemistry, spectral properties, and fine scale textures associated with these color changes.”
Curiosity Navcam Right B photo acquired on Sol 1949, January 29, 2018.
Credit: NASA/JPL-Caltech
Brush and observe
One contact science target, “Balmedie,” has been chosen for Curiosity to brush and observe with the Mars Hand Lens Imager (MAHLI) and the robot’s Alpha Particle X-Ray Spectrometer (APXS)
“This rock was one of the only rocks in the workspace that was big enough to safely brush, and the observations we take will provide information about the properties of the bedrock in the area,” Fraeman adds.
Curiosity Navcam Left B image acquired on Sol 1949, January 29, 2018.
Credit: NASA/JPL-Caltech
Different colors
The plan also calls for taking Mastcam multispectral observation of Balmedie and its surroundings. After the contact science block, on tap is collecting Chemistry and Camera (ChemCam) observations of bedrock targets that have different colors, “Killiecrankie” and “Bennachie.”
Also a ChemCam Remote Micro-Imager mosaic of a distant target on Mt. Sharp named “Muchalls” is on the schedule.
Mastcam will document the two ChemCam laser targets, and Curiosity will also take a 7×2 stereo mosaic of a distant target “Harris Bay,” which is a potential geologic contact.

Curiosity Mars Hand Lens Imager (MAHLI) produced this product by merging two to eight images previously taken by the instrument. MAHLI is located on the turret at the end of the rover’s robotic arm.AHLI Sol 1949, January 29, 2018.
Credit: NASA/JPL-Caltech/MSSS
Drive to the northeast
The first sol of the plan will end with a drive to the northeast. On the plan is use of Autonomous Exploration for Gathering Increased Science (AEGIS) software to make an auto-target observation on the second sol of the plan, along with a dust devil search.

Curiosity laser shots dot the surface of Mars near rover tire track.
Curiosity Mastcam Right photo taken on Sol 1948, January 28, 2018.
Credit: NASA/JPL-Caltech/MSSS
Fraeman notes that this week all of the Curiosity science team members are traveling to Pasadena for a bi-annual meeting.
“We will converse about the latest data and share our interpretations with one another,” Fraeman adds. “Team members are located all across the world, so it’s wonderful to be able to meet face to face to discuss all of our recent results!”

Navcam Left B image acquired on Sol 1949, January 29, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover is now in Sol 1949, taking in views of Mt. Sharp in the neighborhood.
The recent weekend plan on Sol 1947 called for Mastcam observation of the target “Montrose”, the first of a pair of images intended to watch for any changes in the soil at this location, reports Ryan Anderson, a planetary geologist at the USGS in Flagstaff, Arizona.

Curiosity Front Hazcam Right B image taken on Sol 1949, January 29, 2018.
Credit: NASA/JPL-Caltech
After that, the rover’s Chemistry and Camera (ChemCam) was slated to do a calibration observation and two analyses of targets “Thurso” and “Loch Tay,” followed by Mastcam documentation of those targets.
In the afternoon of Sol 1947, the robot’s Mars Hand Lens Imager (MAHLI) was to take pictures of Thurso and Loch Tay. The rover’s Alpha Particle X-Ray Spectrometer (APXS) was slated to perform a short measurement of Thurso, and then an overnight measurement of Loch Tay.

Navcam Left B image acquired on Sol 1949, January 29, 2018.
Credit: NASA/JPL-CaltechLong-distance imaging
On the plan for Sol 1948, ChemCam was set to do the long-distance imaging of Mt. Sharp, followed by a measurement of “Loch Scridain”.
Mastcam was tagged to document the ChemCam target, and then has several mosaics of the target “Harris Bay”. In the late afternoon on Sol 1948, ChemCam and Mastcam will do some “flat field” observations of the sky.
Navcam Right B photo taken on Sol 1949, January 29, 2018.
Credit: NASA/JPL-Caltech
“Flat fields are used to check for, and potentially correct for, things like dust on the optics of a camera,” Anderson says.
Short drive
On Sol 1949, Curiosity’s Mastcam and Navcam were scheduled some atmospheric observations to measure the amount of dust in the atmosphere, and Mastcam will follow up with a second observation of “Montrose” to look for changes.
The plan then calls for Curiosity to do a short drive, and collect post-drive imaging so ground controllers and scientists can plan this week’s activities,” Anderson concludes.

Credit: The Aerospace Corporation
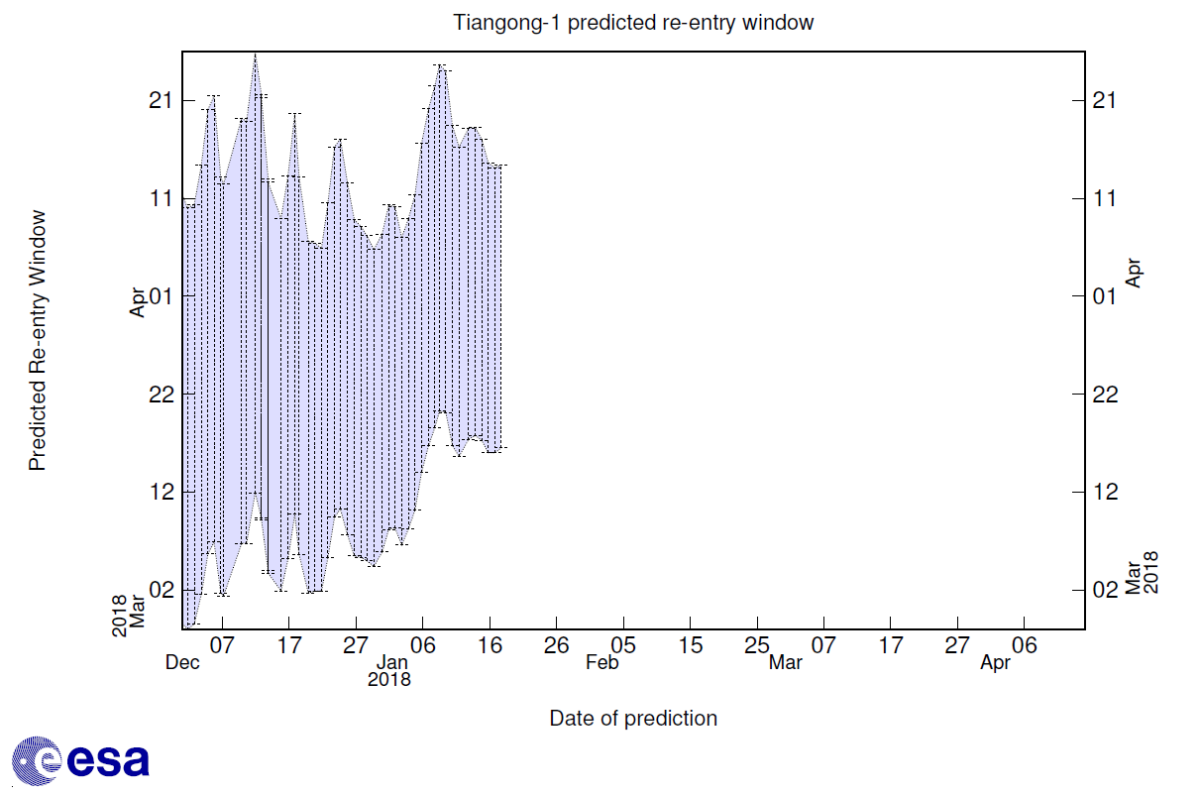
The European Space Agency’s Space Debris Office in Darmstadt, Germany has updated its prediction of when China’s Tiangong-1 space lab will reenter.
The posted January 26 estimate is roughly March 18 to roughly April 12 – noting that this current estimated window “is highly variable.”
According to the ESA office, due to the orbital inclination of the Tiangong-1, approximately 42.8 degrees, and the likely uncontrolled nature of the reentry, the final impact point can be anywhere on Earth between 42.8 degrees North and 42.8 degrees South in latitude, e.g. Spain, France, Portugal, Greece, etc. Areas outside of these latitudes can be excluded, they add.
Credit: ESA CC BY-SA IGO 3.0
Controlled/uncontrolled?
ESA explains that in March 2016 the Tiangong-1 space station ceased functioning but maintained its structural integrity.
“In so far as can be fully confirmed,” notes the ESA office, “ground teams lost control with the craft, and it can no longer be commanded to fire its engines. It is, therefore, expected to make an ‘uncontrolled reentry.’”
Earlier this month, a Chinese space engineer indicated that the country’s Tiangong-1 space lab is not out of control.
“We have been continuously monitoring Tiangong-1 and expect to allow it to fall within the first half of this year,” explains Zhu Congpeng, an engineer at the China Aerospace Science and Technology Corporation, notifying the state-run Science and Technology Daily newspaper.
“It will burn up on entering the atmosphere,” Zhu said, “and the remaining wreckage will fall into a designated area of the sea, without endangering the surface,” he said, remarks also relayed via a January 7 story by Reuters.
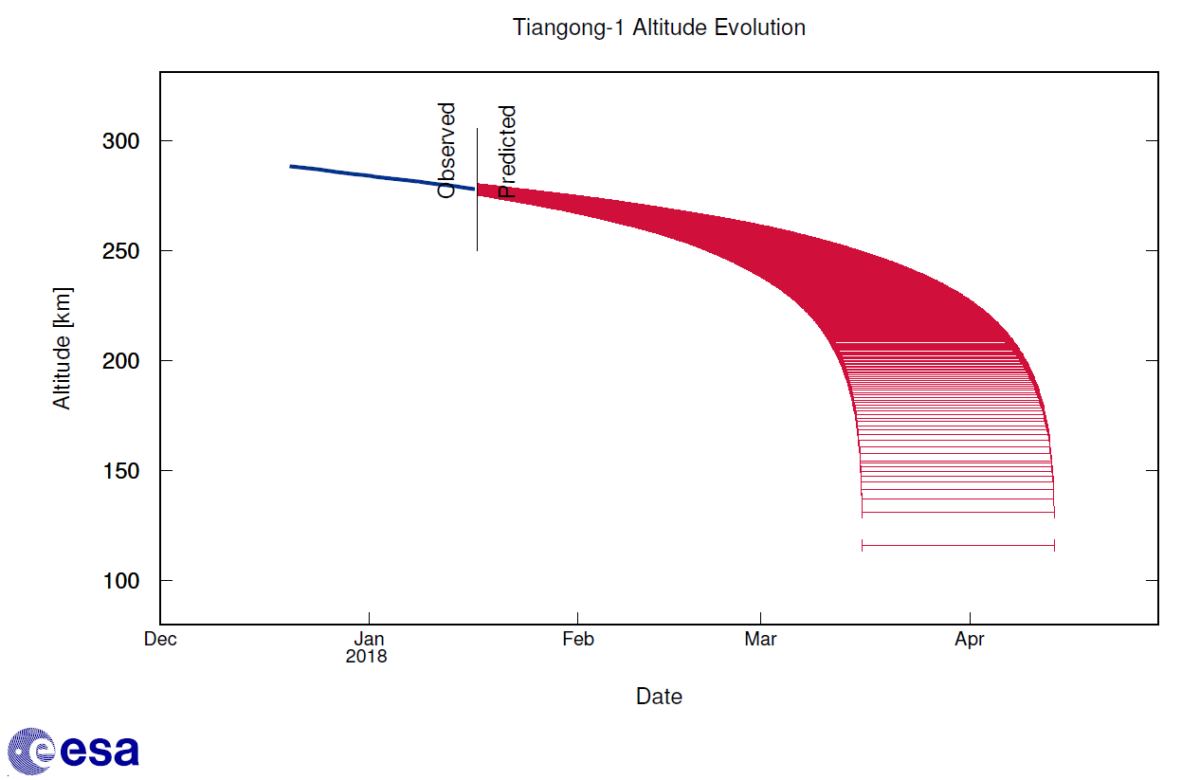
Credit: ESA CC BY-SA IGO 3.0
Limited control
“I think the confusion comes from the fact that control is limited to the attitude of the space lab – but not to the orbit,” explains Holger Krag, Head of the Space Debris Office for ESA in Darmstadt, Germany.
Attitude control has (hardly) no impact on the orbit, Krag said, “and a deorbit impact point cannot be achieved. Orbit control requires a meaningful propulsion function, which is not available/defunct,” he told Inside Outer Space.
With its 8.5 metric tons of (initial) mass, Tiangong-1 (whose name means “Heavenly Palace” in Chinese) was rocketed into Earth orbit in late September 2011. It is the first space station built and launched by China. It was designed to be a crewed lab as well as an experiment/demonstration for the larger, multiple-module space station.
Credit: The Aerospace Corporation/CORDS
Guessing game
The Aerospace Corporation’s Center for Orbital and Reentry Debris Studies (CORDS) is sponsoring a “live on green event” guessing game. Entrants can compete for Aerospace swag with the closest estimate to the actual reentry date and time of China’s Tiangong-1 space lab.
Enter your information for a chance to win some Aerospace booty with the closest guess to the actual reentry date and time of China’s Tiangong-1.
Submit your guess by going to:
http://www.aerospace.org/cords/live-on-green/
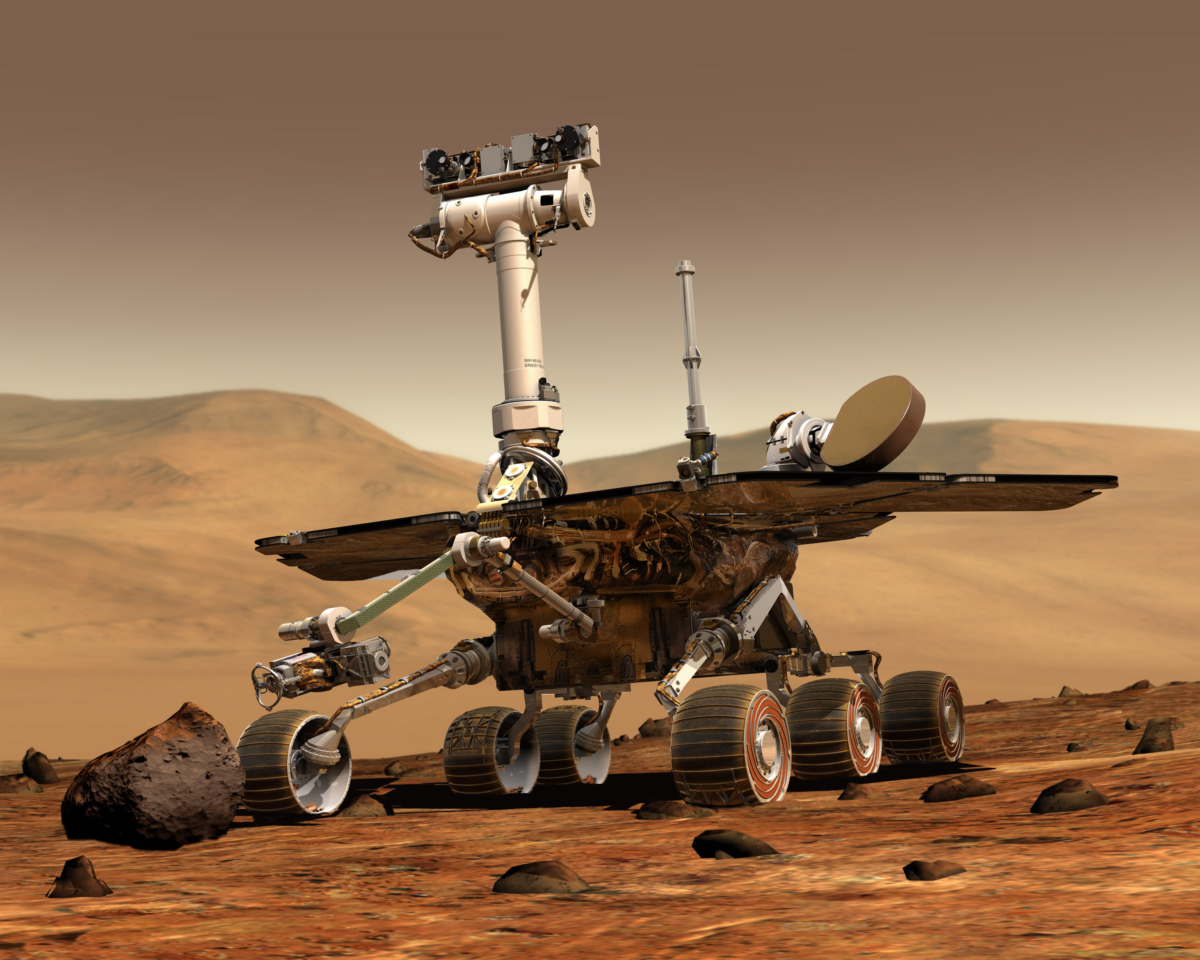
Artist’s view of Opportunity rover – still wheeling and dealing with Mars.
Credit: NASA/JPL
NASA’s Opportunity Mars rover has just passed 14 years of exploring the Red Planet.
The robot has been working on Mars since landing in Meridiani Planum on January 25, 2004.
Originally intended to last 90 days, the machine is still trekking and is continuing her winter exploration of “Perseverance Valley” on the west rim of Endeavour Crater from a location in the north fork of the local flow channel.
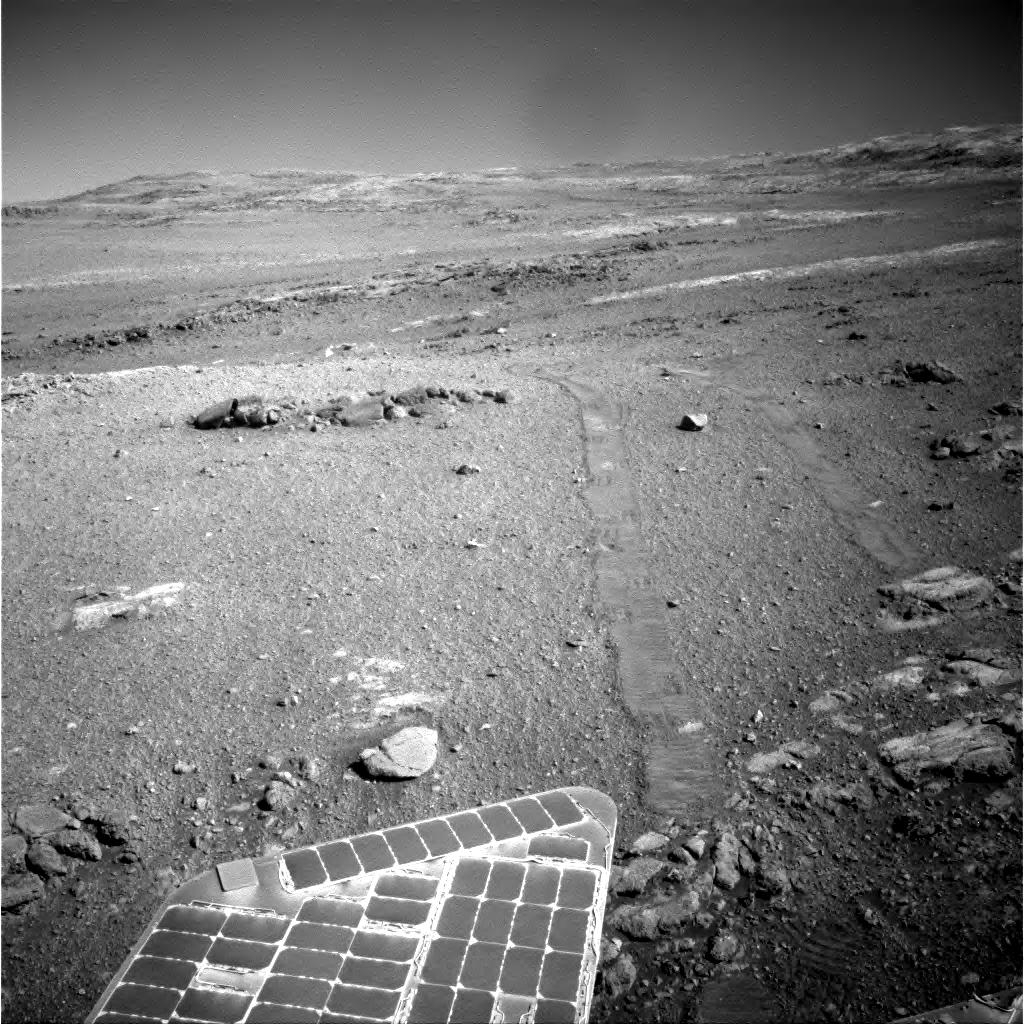
Opportunity Front Hazcam image taken on Sol 4979.
Credit: NASA/JPL
Flight software update
On Sol 4977 (Jan. 23, 2018), Opportunity received the latest version of flight software, copied over the older fallback version in preparation for a flight software update scheduled for later in the year.
On Sol 4970 (Jan. 16, 2018), Opportunity benefited from a significant dust cleaning of the solar arrays, which happens this time of year. The rover’s robotic arm, its Alpha Particle X-ray Spectrometer (APXS), and Microscopic Imager (MI) continue to be utilized.
Opportunity Navigation Camera image taken on Sol 4978.
Credit: NASA/JPL
Opportunity has moved along the north fork of the local flow channel. It spent several sols completing stereo, color panoramas, performed targeted 13-filter imaging, as well as wheeling to selected surface targets for closer investigation.
Batteries: signs of aging
Earlier in the month, ground controllers prepared and executed a test of the Zero Degree Heater (ZDH) on the rover’s batteries.
“Opportunity’s batteries have performed very well over the mission’s lifetime but are showing some signs of aging. Martian environment is quite cold and it was suspected that warming the battery during the recharge process may make the battery both more effective and degrade slower,” according to a JPL Opportunity Update.
Odometry reading
Though never used in flight, the ZDH was intended to warm the battery.

Most recent traverse map for Opportunity rover.
Credit: NASA/JPL
“Since it has never been turned on in flight we wanted to be very cautious before using it operationally and so a testing campaign was formulated. The first original test in this campaign was to turn it on briefly, manually (as opposed to thermostatically), and in a controlled and recoverable (in the case of a fault) setting,” the update notes. “This test was executed in the morning of Sol 4964 (Jan. 10, 2018), and appears to have been successful.”
Since touchdown on Mars, total odometry for the robot now stands at over 28 miles (45 kilometers).

Humanity Star and its creator, Peter Beck.
Courtesy Humanity Star
There was a “secret” satellite onboard Rocket Lab’s “Still Testing” Electron launch vehicle that lifted off from New Zealand on January 21.
Now in orbit is “Humanity Star,” created by Rocket Lab founder and CEO Peter Beck.
Still Testing also orbited a Dove Pioneer Earth-imaging satellite for launch customer Planet, as well as two Lemur-2 satellites for Spire, a weather and ship tracking company.
Geodesic sphere
The Humanity Star is a geodesic sphere made from carbon fiber with 65 highly reflective panels. It spins rapidly, reflecting the sun’s rays back to Earth, creating a flashing light that can be seen against a backdrop of stars.
Orbiting the Earth every 90 minutes and visible from anywhere on the globe, the Humanity Star is designed to be a bright symbol and reminder to all on Earth about our fragile place in the universe, explains Beck.

Credit: Humanity Star
Bright, blinking
“No matter where you are in the world, rich or in poverty, in conflict or at peace,” Beck explains, “everyone will be able to see the bright, blinking Humanity Star orbiting Earth in the night sky. My hope is that everyone looking up at the Humanity Star will look past it to the expanse of the universe, feel a connection to our place in it and think a little differently about their lives, actions and what is important.”
The Humanity Star will orbit the Earth for approximately nine months before its orbit starts to decay and it is pulled back into the Earth’s gravity.
To read more information on Humanity Star, and also access a tracking tool to spot the satellite, go to:
http://www.thehumanitystar.com/
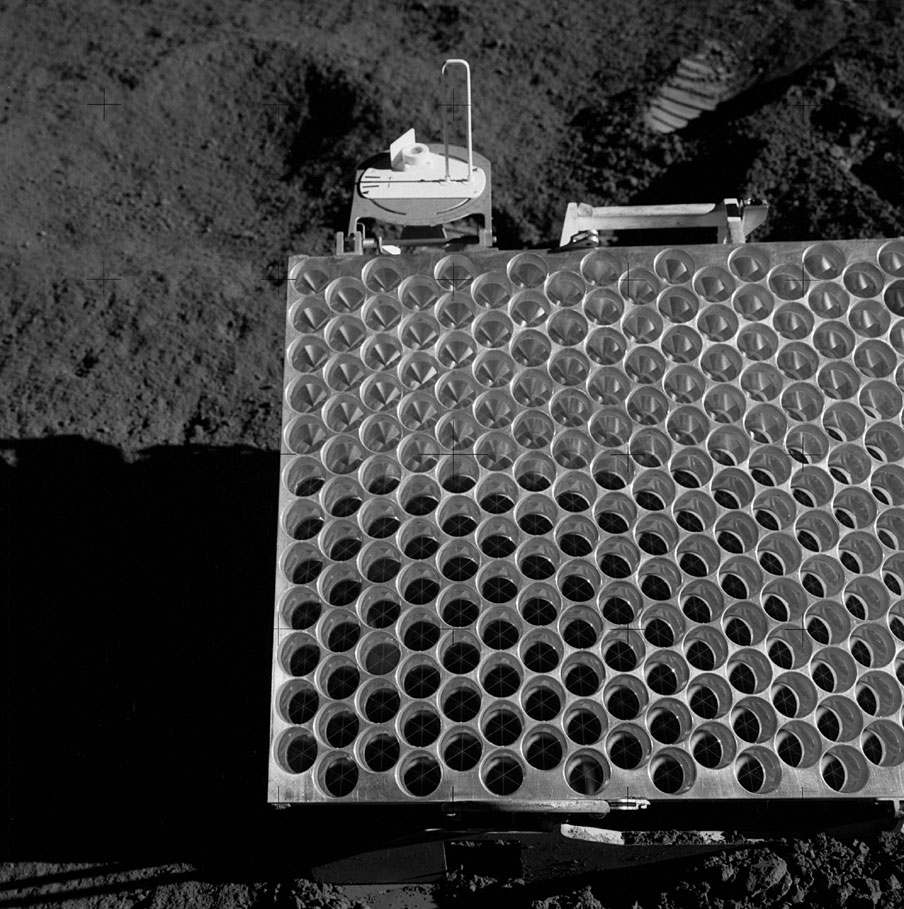
The Apollo 15 Lunar Laser Ranging RetroReflector (LRRR) array deployed on the Moon in 1971.
Credit: NASA/David Scott
China has successfully made its first Lunar Laser Ranging measurements, making use of the Apollo 15 Lunar Laser Ranging RetroReflector (LRRR) array – equipment deployed on the Moon in 1971.
The applied astronomy group from the Yunnan Observatories measured the distance between the Apollo 15 retro-reflector and the Yunnan Observatories ground station.
Results of Lunar Laser Ranging (LLR) measurements are valuable in the study of astro-geodynamics, Earth-moon system dynamics and lunar physics. China’s LLR program joins the United States, France and Italy in harnessing the capability.
Focus on science
Apollo 15’s Falcon lunar module was piloted by David Scott and James Irwin to a landing spot at Hadley Rille.
Apollo 15 was the ninth piloted mission in the United States’ Apollo program, the fourth to land on the Moon. It was the first of what were termed “J missions” – long stays on the Moon, with a greater focus on science than had been possible on previous missions. That Apollo mission was first to utilize a lunar rover for increased mobility of moonwalkers on the surface.

NASA’s Lunar Reconnaissance Orbiter acquired this image of the Apollo 15 landing site. Lunar Laser Ranging RetroReflector (LRRR) is circled.
Credit: NASA/GSFC/Arizona State University
Far side lander
The LLR was conducted in the context of China preparing to launch the Chang’e-4 lunar probe this year that will attempt the first soft landing on the far side of the Moon.
“In the near future, China will plant its own retro-reflector on the Moon, which will further boost the development of LLR in China,” said Li Yuqiang, an associate researcher with Yunnan Observatories, as reported by the Xinhua news agency.

Credit: World Economic Forum
From ubiquitous internet access to precise climate monitoring and affordable space tourism, a new golden age of space economy led by the commercial sector is upon us, or is it?
How can investors, companies and governments leverage an arguable one trillion dollar space industry to benefit society?
In case you missed it, yesterday the World Economic Forum now underway in Davos, Switzerland, hosted a panel titled “The Space Economy Takes Off” featuring business and government leaders discussing the future of space investment, entrepreneurship and public-private partnerships.
Moderated by Jamie Heller of the Wall Street Journal, the panel featured:
- Richard Ambrose, Executive Vice-President, Space Systems, Lockheed Martin Space Systems Company, USA
- Xavier Bettel, Prime Minister and Minister for Communications, Media and Culture of Luxembourg
- Howard L. Lance, Chief Executive Officer, Maxar Technologies, USA
- Ion Yadigaroglu, Managing Partner, Capricorn Investment Group, USA
The panel was moderated by Jamie Heller, Business Editor, The Wall Street Journal.
Go to this informative video at:

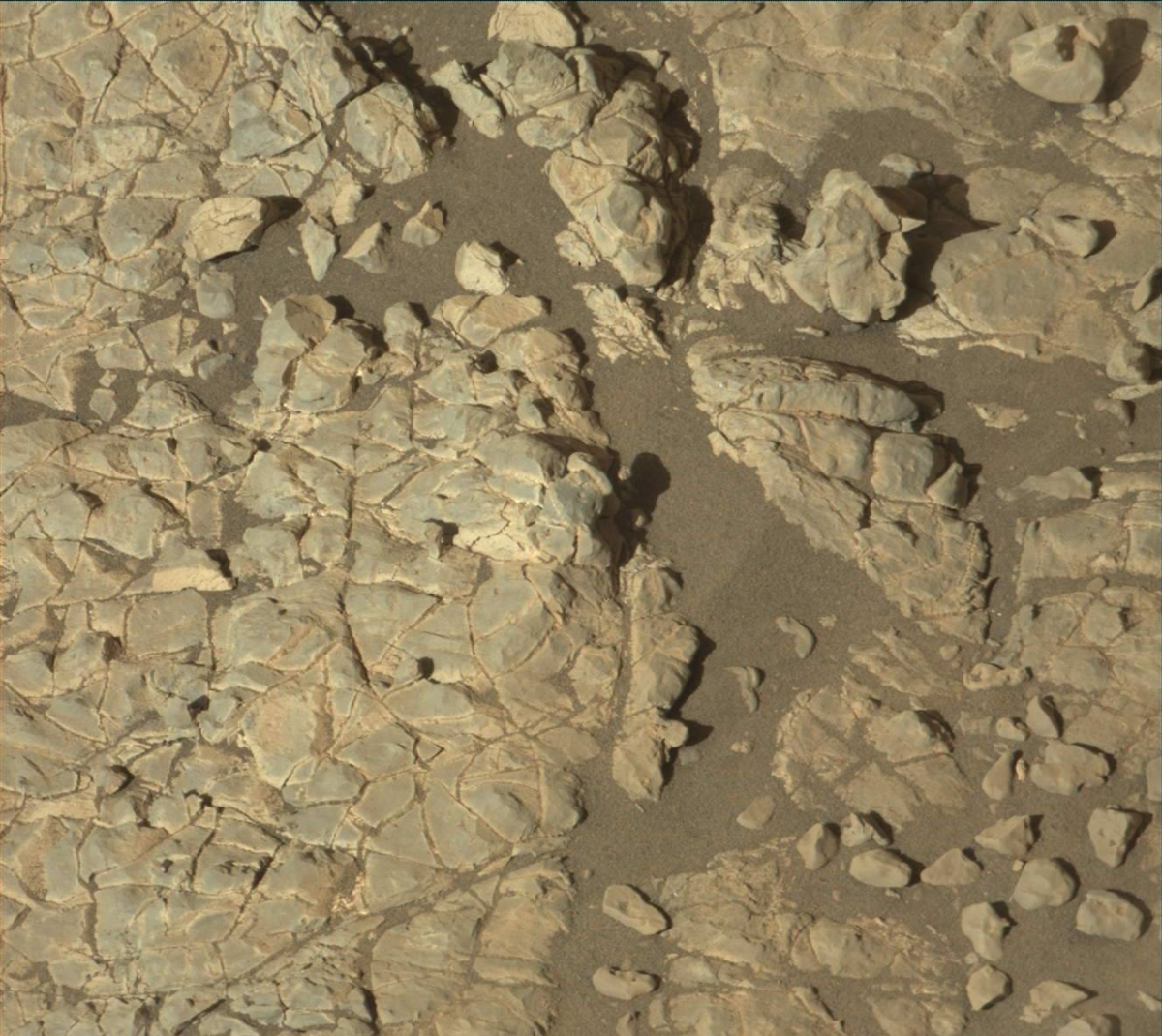
Curiosity Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, acquired this image on Sol 1943, January 23, 2018. Photo is part of a selfie mosaic soon to be released.
Credit: NASA/JPL-Caltech/MSSS
Scott Guzewich, an atmospheric scientist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland, reports that a recent drive of the Curiosity Mars rover has put the robot near the edge of the Vera Rubin Ridge.
“Curiosity diverted from our primary ‘Mount Sharp Ascent Route’ a couple weeks ago as we continued to investigate the outcrops of bluish-toned rock that are scattered around this region of the Vera Rubin Ridge,” Guzewich notes.
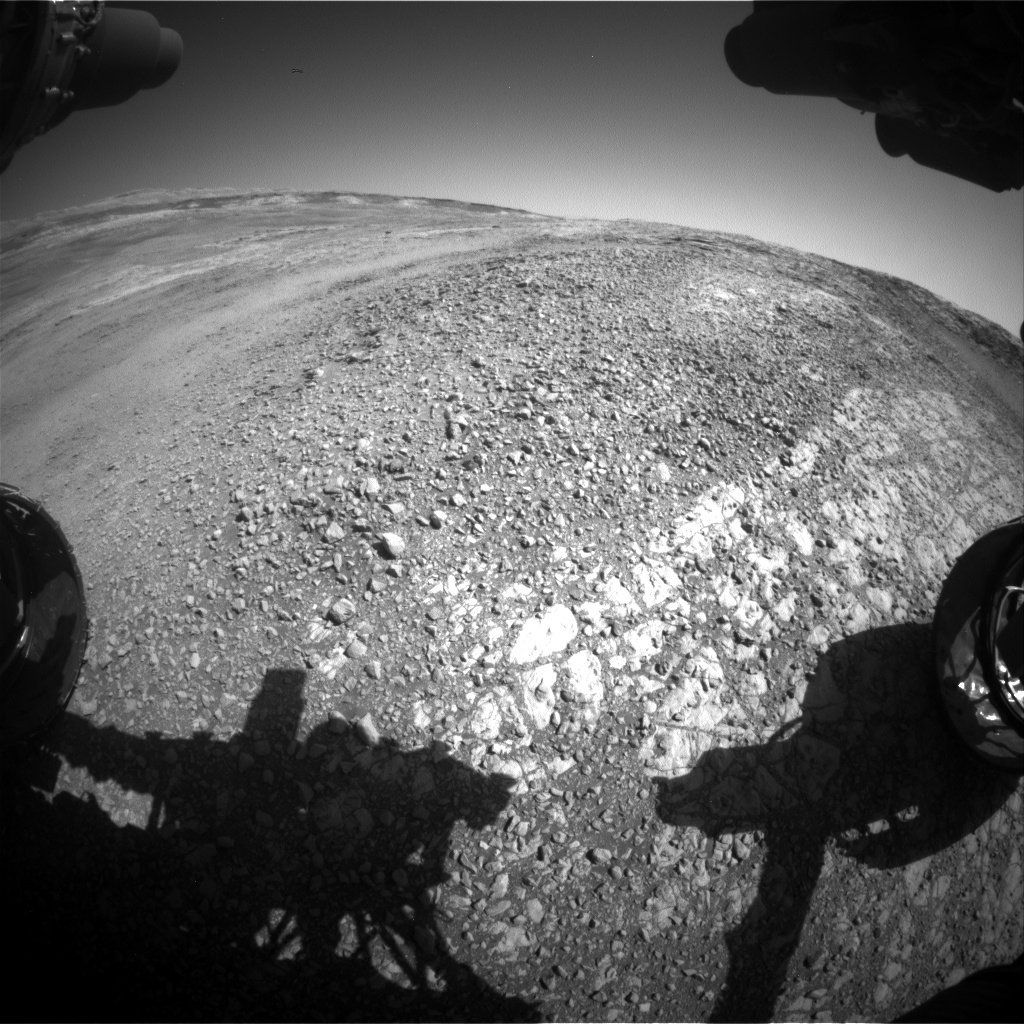
Curiosity Front Hazcam Right B image taken on Sol 1944, January 24, 2018.
Credit: NASA/JPL-Caltech
The rover is now in Sol 1945 overlooking the “clay unit” that it will eventually reach.
Curiosity Rear Hazcam Right B image taken on Sol 1944, January 24, 2018.
Credit: NASA/JPL-Caltech
Work to do
“We still have work to do in the hematite-rich Vera Rubin Ridge and so we must return to our original path eastward along the ridge and will begin that with a drive on the second sol of today’s plan,” Guzewich adds.
But before the rover departs, Curiosity will finish investigating the science goal of this location: studying a transition in rock tones between more gray-blue tones and those familiar martian orange-reds.
Contact science
Contact science is slated on one of the redder-toned rocks, “Loch Gairloch”, with Alpha Particle X-Ray Spectrometer (APXS) and Mars Hand Lens Imager (MAHLI), Guzewich explains.
That will be followed by a series of Chemistry & Camera (ChemCam) Laser-Induced Breakdown Spectrometer (LIBS) rasters on a suite of both bluish and reddish rocks in the rover’s workspace: “Callander,” “Moidart,” and “Kirkcolm.”
Curiosity Navcam Left B photo taken on Sol 1944, January 24, 2018.
Credit: NASA/JPL-Caltech
In addition, Mastcam images will be taken of those nearby targets as well as some more distant features, “Eriskay,” “Glen Tilt,” and “Broadford” along the rover’s future drive path, Guzewich concludes.
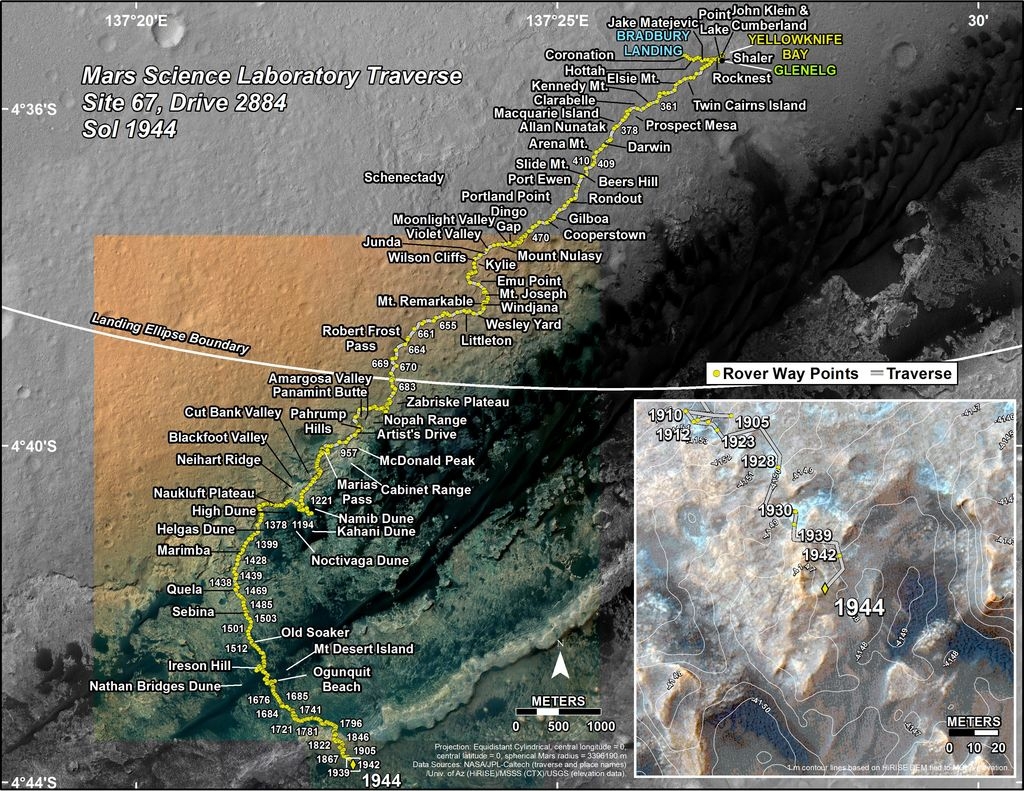
New traverse map
Meanwhile, a new Curiosity traverse map through Sol 1944 has been issued.
The map shows the route driven by the robot through the 1944 Martian day, or sol, of the rover’s mission on Mars (January 24, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1942 to Sol 1944, Curiosity had driven a straight line distance of about 47.88 feet (14.60 meters), bringing the rover’s total odometry for the mission to 11.21 miles (18.05 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
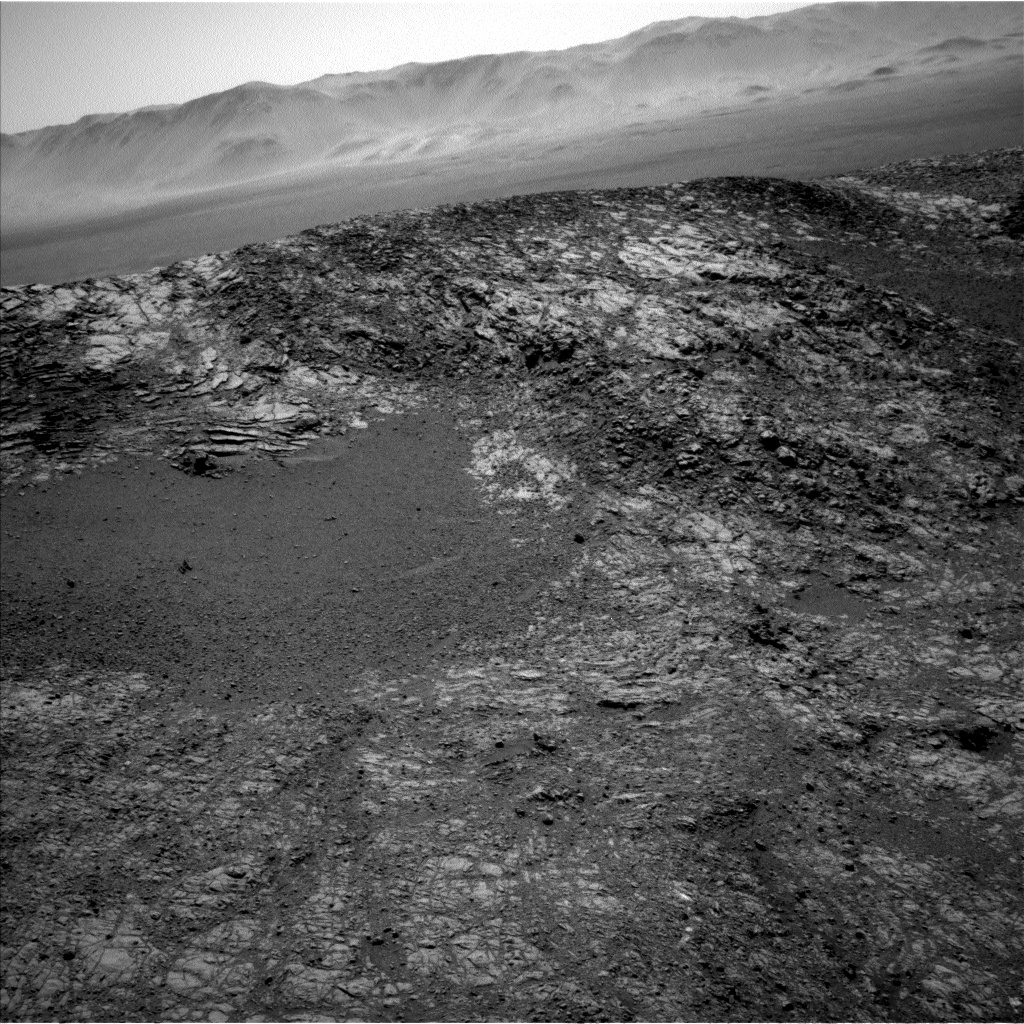
Curiosity Mastcam Right image acquired on Sol 1943, January 23, 2018.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Navcam Right B photo acquired on Sol 1944, January 24, 2018.
Credit: NASA/JPL-Caltech

