Archive for February, 2017
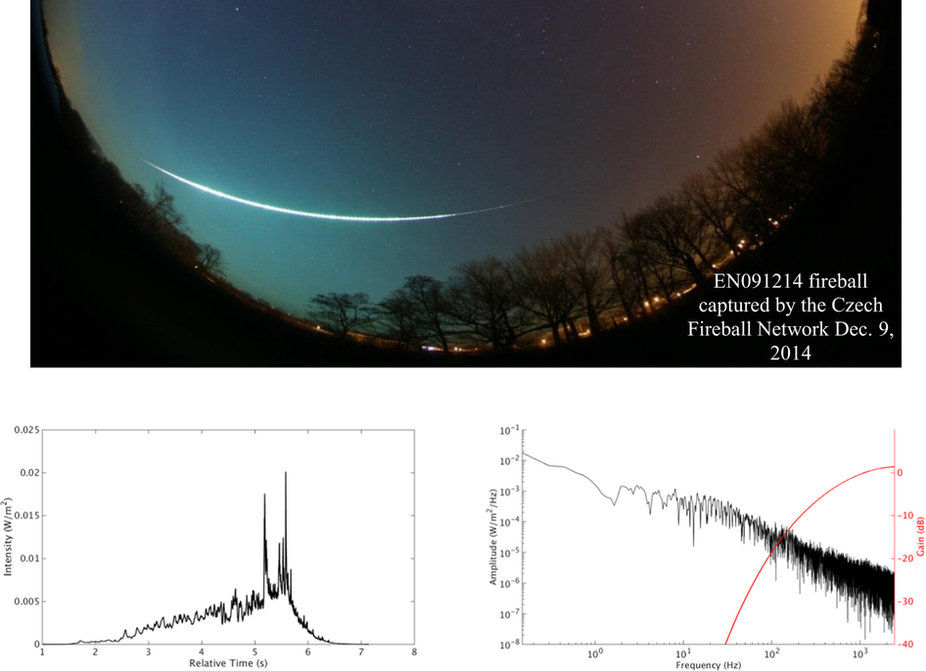
Open-shutter photograph of fireball EN09121418 taken by Pavel Spurný at the Czech Fireball Network along with related data regarding sound emitted from fireballs.
Credit: Spalding, R. et al.
Meteors emitting sizzling, rustling and hissing sounds as they descend seem contrary to the laws of physics.
What’s up with this observation?
Because sound travels far slower than light, the sounds should arrive several minutes after the meteor hits, rather than accompany or even precede it. These sounds cannot be attributed to direct acoustic propagation from the upper atmosphere for which travel time would be several minutes.
New idea

The late Sandia National Laboratories researcher and pioneer Richard Spalding, father of Meteor Allsky Networks.
Credit: Randy Montoya/Sandia National Laboratories
In an article published Feb. 1 in the journal Scientific Reports titled “Photoacoustic Sounds from Meteors,” the late Sandia National Laboratories researcher Richard Spalding and fellow researchers offered up a new idea.
Spalding and his colleagues reasoned that such intense light could suddenly heat the surface of objects many miles away, which in turn heats the surrounding air. This could create sounds near the observer.
Some new experimentally work has demonstrated and analyzed that effect.
Dark cloths and a wig
The investigative researchers found that objects with low conductivity, such as leaves, grass, dark paint and even hair, could rapidly warm and transmit heat into nearby air and generate pressure waves by subtle oscillations that create a variety of sounds.
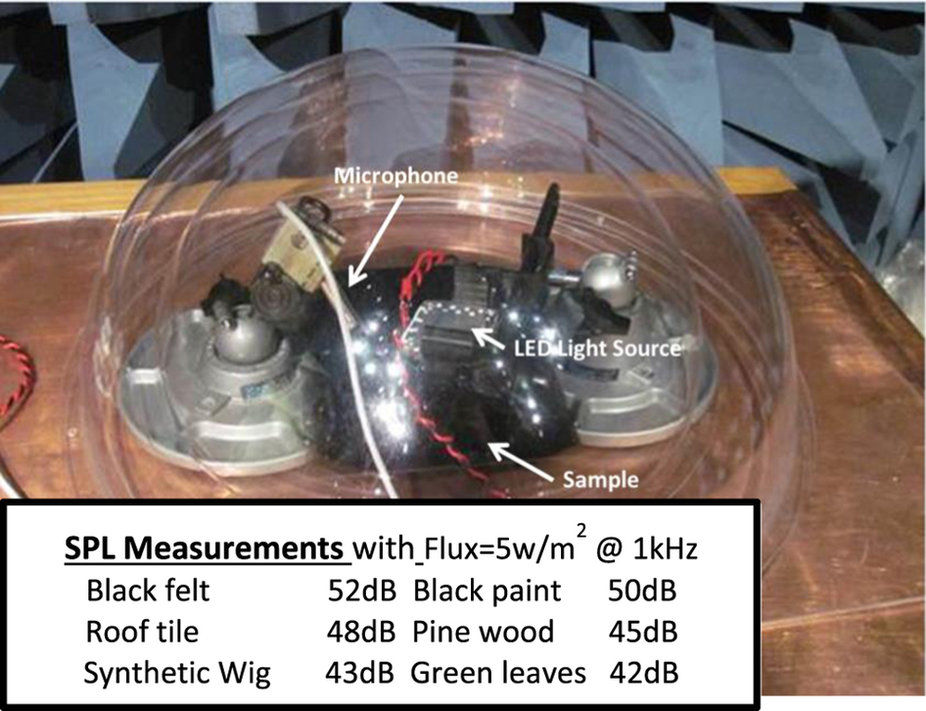
The experimenters exposed several materials, including dark cloths and a wig, to intense pulsing light akin to that produced by a fireball. The process produced faint sounds similar to rustling leaves or faint whispers. Computer models bear out the results.
The process is called photoacoustic coupling.
Acoustic waves
According to a Sandia news release, sounds concurrent with a meteor’s arrival “must be associated with some form of electromagnetic energy generated by the meteor, propagated to the vicinity of the observer and transduced into acoustic waves,” according to the article in Scientific Reports. “A succession of light-pulse-produced pressure waves can then manifest as sound to a nearby observer.”
A less extreme version of the photoacoustic effect had been observed in 1880 by Alexander Graham Bell.
At that time, Bell tested the possibilities of light for long-distance phone transmissions and he intermittently interrupted sunlight shining on a variety of materials and noted the sounds produced.
Resources
Along with Spalding, the other scientists engaged in the research:
Sandia National Laboratories, Albuquerque, New Mexico – John Tencer, William Sweatt, Benjamin Conley, Roy Hogan, Mark Boslough & GiGi Gonzales
Astronomical Institute, Czech Academy of Sciences, Ondřejov, Czech Republic – Pavel Spurný
To read the full paper, “Photoacoustic Sounds from Meteors” go to:

Rocket Lab’s Electron booster will soon take to the air.
Credit: Rocket Lab
The first orbital launch attempt from New Zealand is near at hand.
Rocket Lab has transported its Electron booster to a launch site in the Mahia Peninsula from the company’s Auckland facility.

Launch site in the Mahia Peninsula.
Credit: Rocket Lab
Rocket Lab’s mission is to make space accessible by offering small satellite customers a rapid-response orbital service that is frequent, reliable and affordable.
The Electron booster is now undergoing pre-flight testing. A trio of test flights is on tap prior to offering the launcher to customers.
Google Lunar X Prize competitor, Moon Express, is contracted with Rocket Lab USA. Their lunar mission is scheduled to take place in 2017 using the MX-1E lunar lander on Rocket Lab’s Electron rocket.

Rocket Lab’s New Zealand launch site.
Credit: Rocket Lab
High flight rate
According to a payload user’s guide provided to Inside Outer Space, the Electron is a two-stage vehicle intended to serve the emerging small satellite market and has been “designed with a high flight rate in mind.”
Electron is optimized, according to the company, for quickly launching constellations of small satellites.
The booster is configured to hurl 150 kg (330lbs) to a nominal 500 km sun-synchronous orbit from the private company’s Rocket Lab Launch Complex in New Zealand as well as from U.S. domestic range.
The standard launch of Electron starts at $4.9 million (2016) per launch. The vehicle is marketed as providing at least 100 flights per year.
New Zealand Space Agency
The Rocket Lab Launch Complex 1 was officially opened in late September of 2016.

Mason Bay dunes.
Credit: New Zealand Space Agency
The New Zealand Government has announced the development of a new regulatory regime for space and high altitude activities. A New Zealand Space Agency was formed in 2016 within the country’s Ministry of Business, Innovation and Employment (MBIE) and is encouraging New Zealand’s participation in the global space economy.
As noted by the MBIE, a key player is Rocket Lab, cited as a commercial space launch operator using innovative and disruptive technology developed in New Zealand and employing highly skilled people in New Zealand.
For a look at Rocket Lab’s preparations, go to this video:
https://www.youtube.com/watch?v=ZFnTpURe7UI
Also, go to the Rocket Lab website at:
For Rocket Lab’s Frequently Asked Questions, go to:
http://www.rocketlabusa.com/frequently-asked-questions/

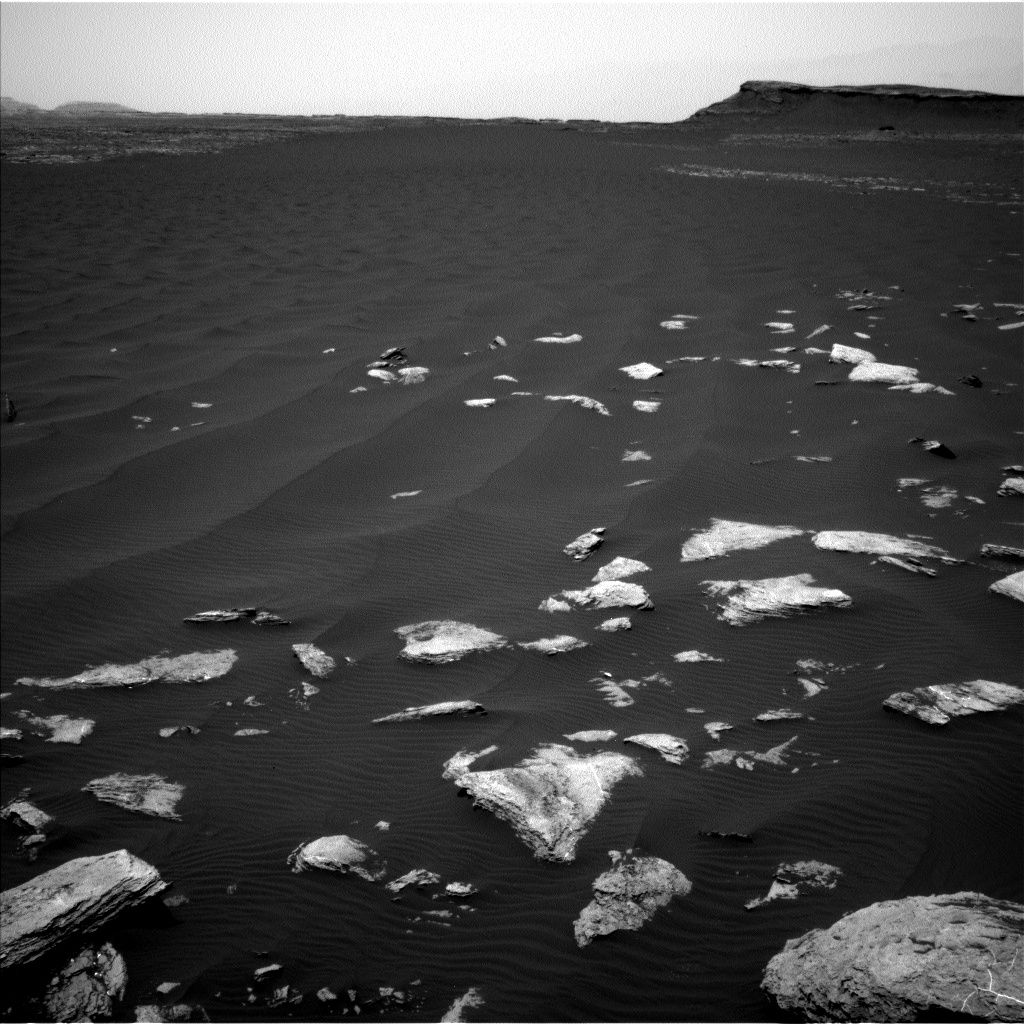
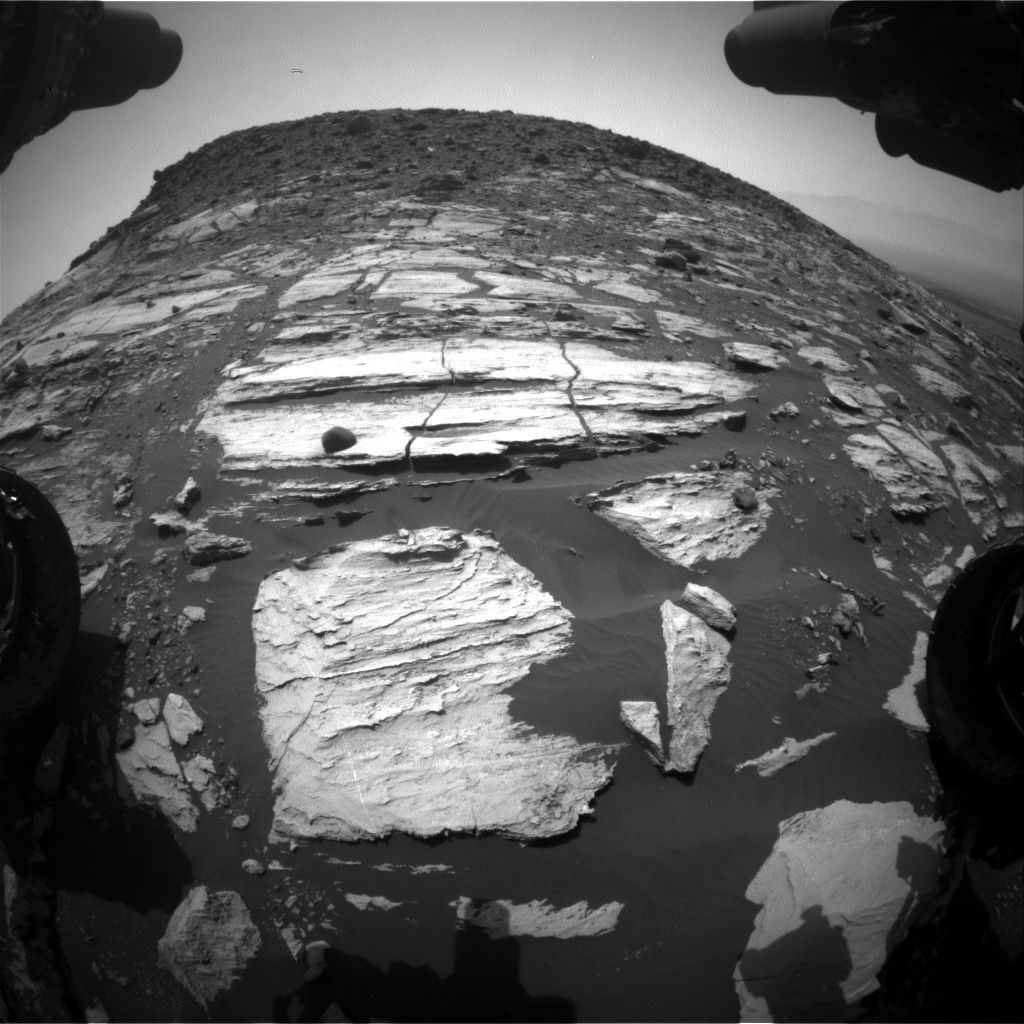
Curiosity Navcam Left B image taken on Sol 1612, February 17, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is conducting Sol 1612 science duties. The robot completed a drive of 75 feet (23 meter) on Sol 1611.
The Mars machinery ended up in an area with many bedrock blocks partly covered by dark sand, reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Curiosity Navcam Left B image taken on Sol 1612, February 17, 2017.
Credit: NASA/JPL-Caltech
Holiday happenings
A two sol plan has been scripted to get a head start on planning for the holiday weekend, with the first sol strategically planned to allow the “touch and go” option, Herkenhoff adds.
“But there’s a ridge about 30 meters ahead that we can’t see over, and we would like to be able to drive up onto it on Sol 1612 to allow a drive past it to be planned this weekend,” Herkenhoff notes. “There isn’t enough time before the ‘decisional’ telecommunications opportunity to fit both contact science and a 30-meter drive into the plan, so we had to pick one of these two options.”
Lots of bedrock
Based on images taken from orbit and by the rover, lots of bedrock is exposed at the crest of the ridge 98 feet (30 meters) away.
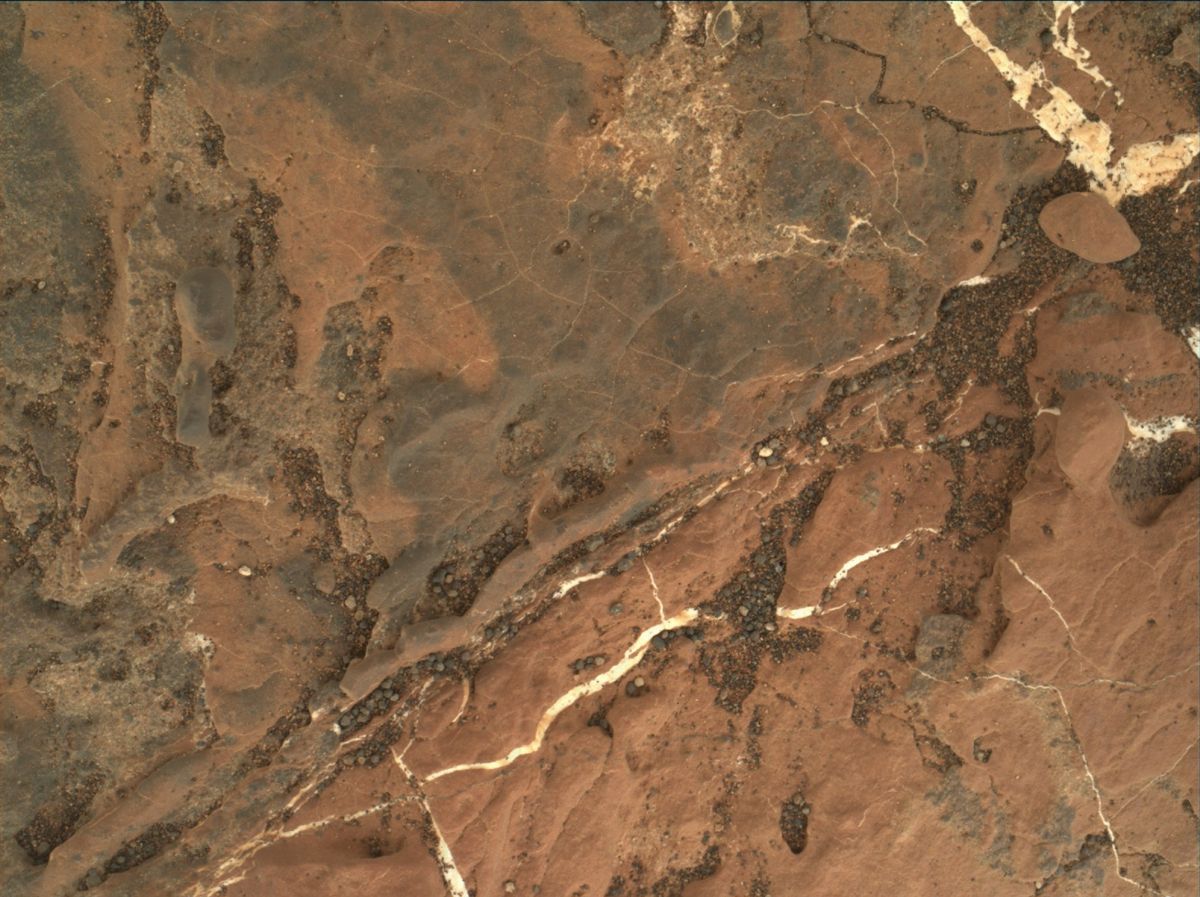
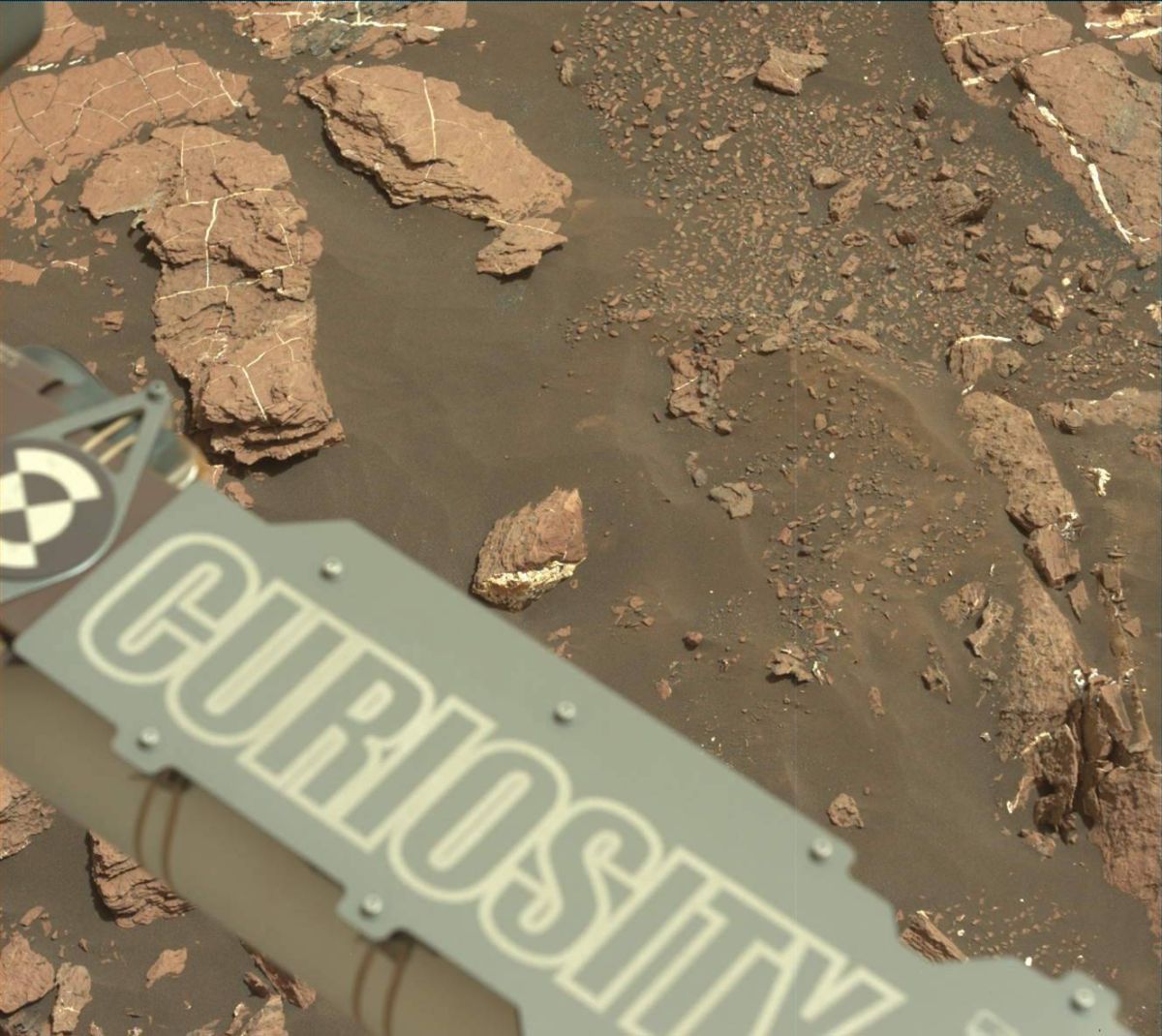
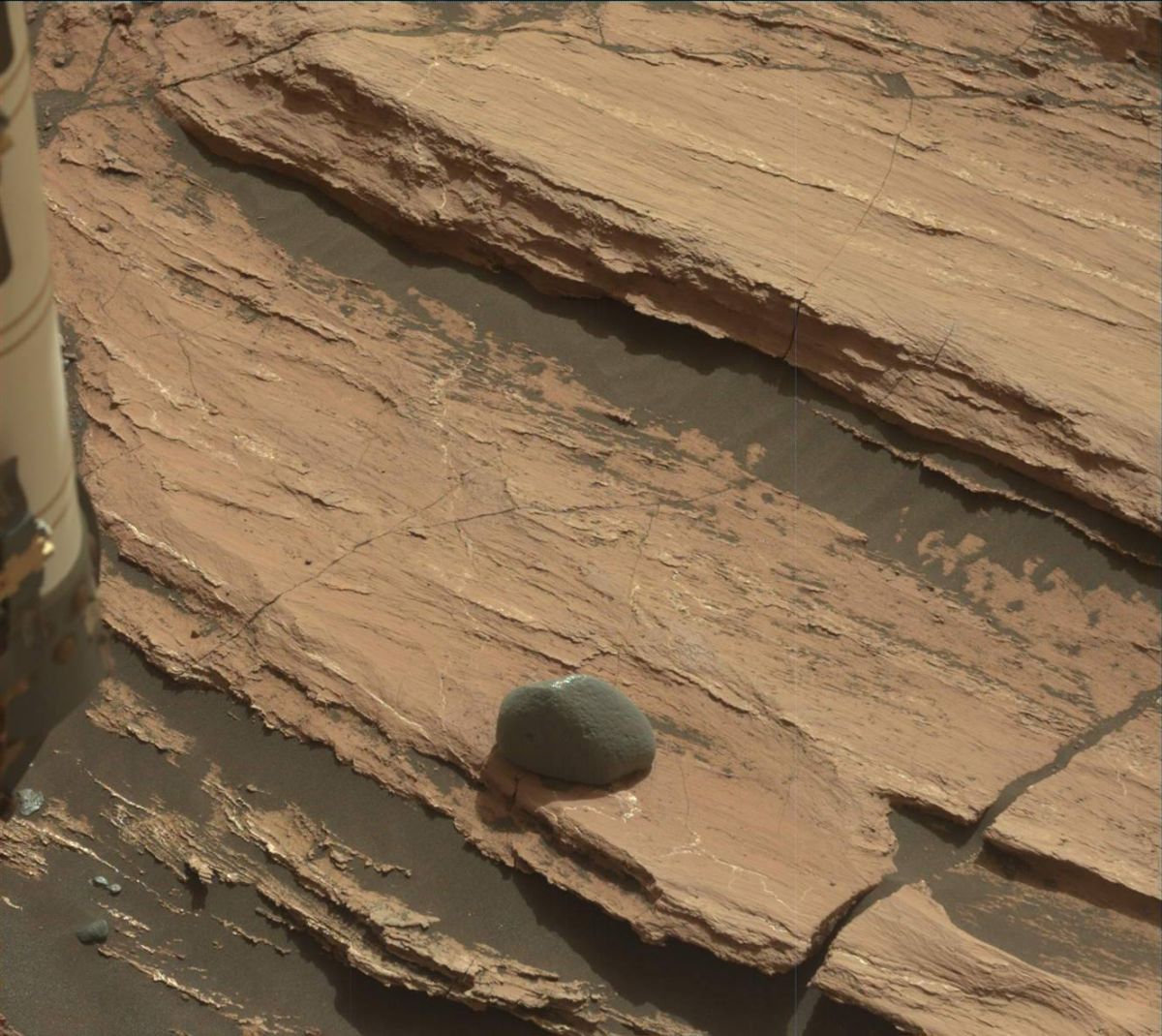
Curiosity Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, acquired this merged imagery on February 16, 2017, Sol 1611.
Credit: NASA/JPL-Caltech/MSSS
That being the case, rover scientists picked the longer drive at the expense of contact science, hoping that Curiosity will be in a better place for contact science this weekend.
Before the drive, the rover’s Chemistry and Camera (ChemCam) and Right Mastcam will observe a bright/dark boundary on a block at the left side “Frenchville” and the Right Mastcam is slated to acquire a 2×2 mosaic of another block named “Third Lake.”
Post-drive plans
Following the drive, scientists plan fewer images to support weekend planning because the expected downlink data volume is much less than usual.
“We therefore spent more time than usual carefully prioritizing the post-drive images for downlink, and may not receive all of the data we need to plan contact science and a drive this weekend,” Herkenhoff reports.
Later in the afternoon of Sol 1612, ChemCam will again use special software to autonomously select a Laser-Induced Breakdown Spectrometer (LIBS) target and acquire a 3×3 set of chemical measurements.
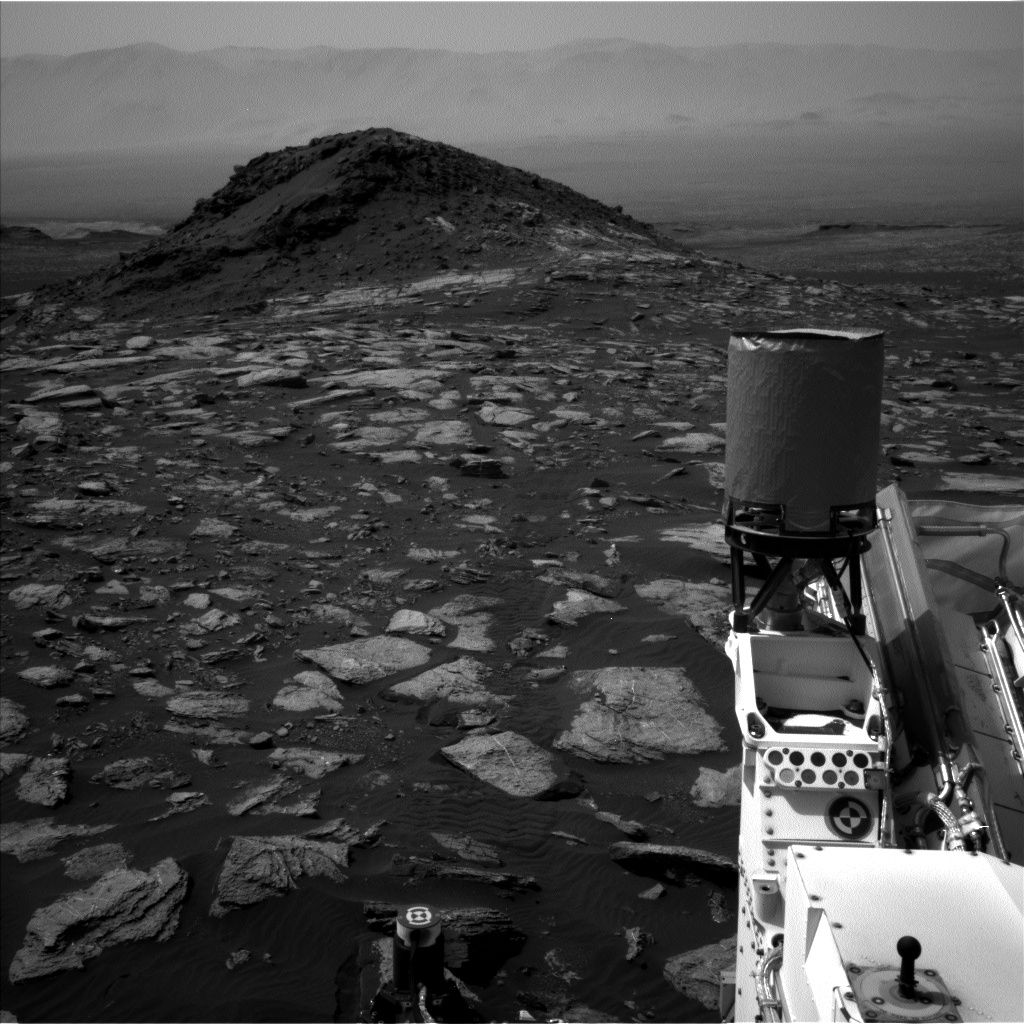
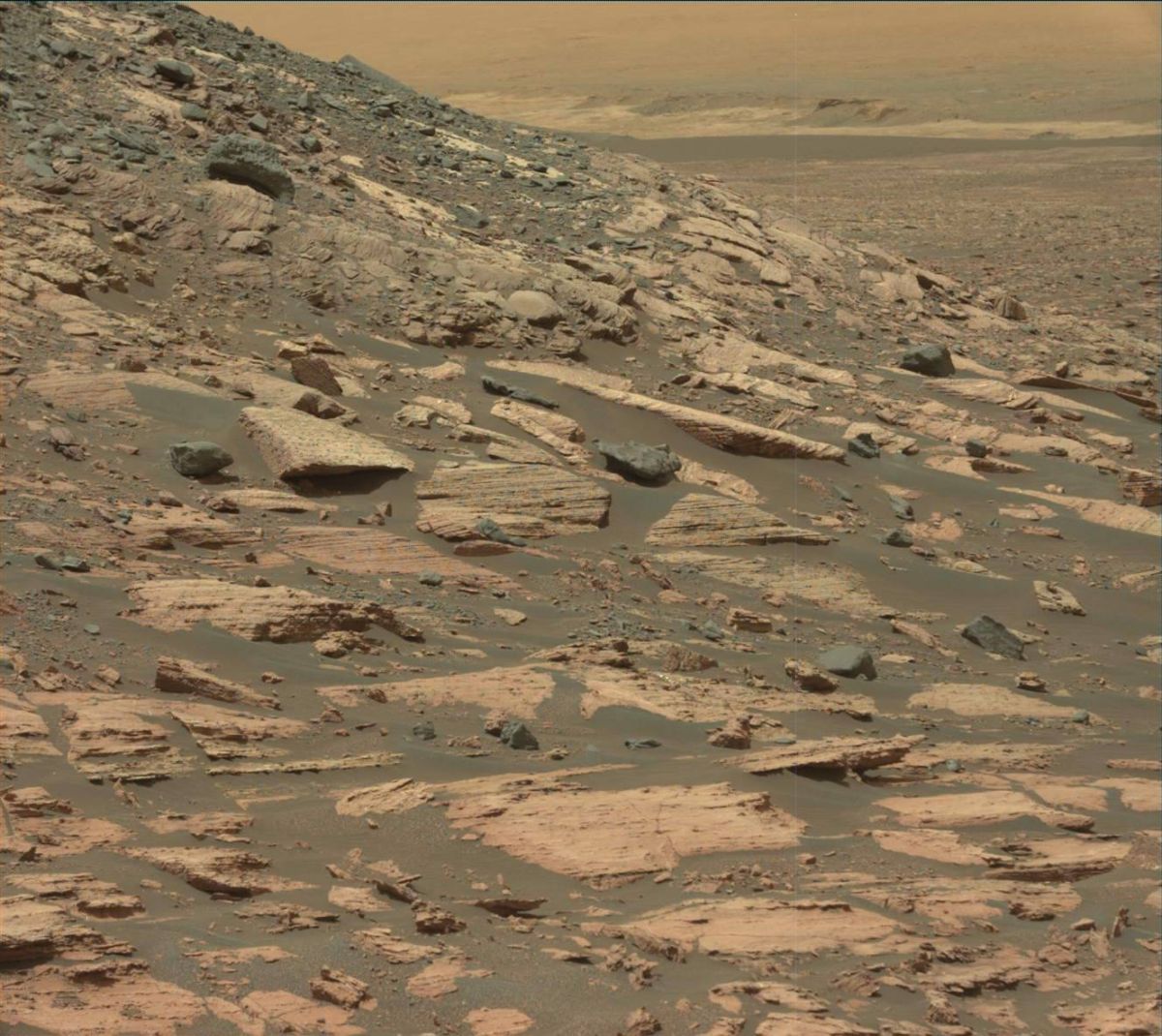
Ireson Hill as seen by Curiosity’s Navcam Left B camera, taken on Sol 1612, February 17, 2017.
Credit: NASA/JPL-Caltech
The Rover Environmental Monitoring Station (REMS) software upgrade went well, so REMS environmental monitoring was on the schedule.
Overnight sleep-in
On Sol 1613, ChemCam will acquire passive calibration data, and Navcam will search for dust devils and clouds.
“Finally, the rover will sleep overnight in preparation for what we hope will be a busy weekend plan,” Herkenhoff concludes.
Curiosity Navcam Left B image taken on Sol 1610, February 15, 2017.
Credit: NASA/JPL-Caltec
Now in Sol 1611, the Curiosity Mars rover is on location to survey several potential targets.
On Sol 1610 the Curiosity Mars rover drove nearly 89 feet (27 meters).
Dark bedrock
A dark patch of bedrock, appropriately named “Patch Mountain” was chosen for Curiosity’s Chemistry and Camera (ChemCam), Right Mastcam, and Mars Hand Lens Imager (MAHLI) observations.
Curiosity Mastcam Left image taken on Sol 1610, February 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
The MAHLI imaging was moved after the ChemCam observation so that the laser-induced breakdown spectroscopy (LIBS) impact spots would be visible, reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
An additional MAHLI image was added to the standard full suite, to provide a 3-image mosaic from 5 centimeters.
Future driving
“Then the rover will drive again, and take images afterward to enable planning more activities on Sol 1612,” Herkenhoff adds.
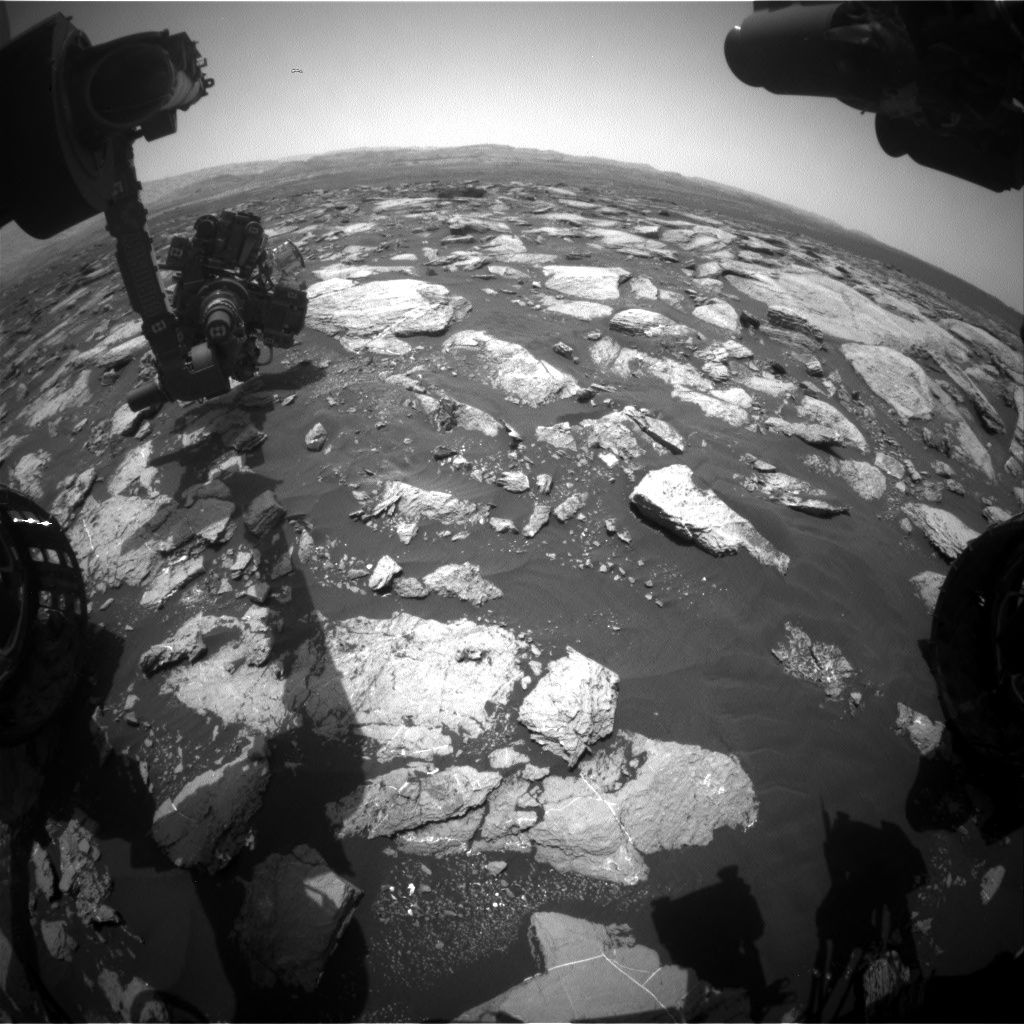
Curiosity Front Hazcam Right B image taken on Sol 1611, February 16, 2017.
Credit: NASA/JPL-Caltech

Curiosity Mastcam Right image taken on Sol 1610, February 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
Just before sunset, the robot’s Navcam will search for dust devils and
the Rover Environmental Monitoring Station (REMS) will complete the second part of their flight software update.
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

This map shows the route driven by NASA’s Mars rover Curiosity through the 1610 Martian day, or sol, of the rover’s mission on Mars (February 15, 2017).
From Sol 1608 to Sol 1610, Curiosity had driven a straight line distance of about 71.89 feet (21.91 meters). Since touching down in Bradbury Landing in August 2012, Curiosity has driven 9.67 miles (15.56 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-CALTECH/University of Arizona
![]()
Full Committee Hearing- NASA: Past, Present, and Future
Date: Thursday, February 16, 2017 – 10:00am
Location: 2318 Rayburn House Office Building
NASA: Past, Present, and Future
1)
Hon. Harrison Schmitt
Apollo 17 Astronaut; Former United States Senator
2)
Lt. Gen. Thomas P. Stafford
Gemini VI, Gemini IX, Apollo 10, Apollo-Soyuz Test Project Astronaut; Chairman, NASA International Space Station Advisory Committee
3)
Dr. Ellen Stofan
Former Chief Scientist, NASA
4)
Mr. Tom Young
Past Director, Goddard Spaceflight Center; Past President/COO, Martin Marietta; Past Chairman, SAIC

This artist’s rendering depicts NASA’s Mars 2020 rover, with its robotic arm extended.
Credit: NASA/JPL-CALTECH
MONROVIA, California – Now on the books is NASA’s Mars 2020 rover mission, arriving at a wheels-down spot on the Red Planet in 2021. On its to-do agenda is surveying a site likely to have been habitable and poke about for signs of past Martian life. And if that’s not enough, there’s more.
This robot is also to select and hoard the most compelling samples on site for later return to Earth, even testing out prototype hardware to shore up a future human expedition to Mars, perhaps in the 2030s.
Landing where?

Screaming in! Mars 2020 rover’s entry, descent and landing – microphones and cameras will capture the sounds and sights.
Credit: NASA/JPL-Caltech
As part of the mission process, a third confab of experts on where to land the rover took place here February 8-10. It was an international tribunal of some 250 scientists and engineers.
For an overview of what took place, take a look at my new Scientific American story at:
NASA’s Mars 2020 Rover: Stepping Stone to What?
https://www.scientificamerican.com/article/nasas-mars-2020-rover-stepping-stone-to-what/
![]()
The Committee on Science, Space, and Technology will hold a hearing titled NASA: Past, Present, and Future.
This hearing is set for Thursday, February 16th at 10:00 a.m. Eastern Standard Time.
The purpose of the hearing is to review NASA’s past portfolio of missions, evaluate existing exploration programs, and provide a venue for consideration of potential bold and innovative missions going forward.

Off-world geologist, Apollo 17’s Jack Schmitt.
Credit: NASA
Witness List
Testifying is a panel of witnesses:
- Harrison Schmitt, Apollo 17 astronaut; former United States senator
- Thomas P. Stafford, Gemini VI, Gemini IX, Apollo 10, Apollo-Soyuz Test Project astronaut; chairman, NASA International Space Station Advisory Committee
- Ellen Stofan, former chief scientist, NASA
- Tom Young, past director, Goddard Spaceflight Center; past president/COO, Martin Marietta; past chairman, SAIC

Future of International Space Station – sure to be a hearing topic.
Credit: NASA
Live streaming
The hearing will be available on the committee’s website and via YouTube.
Go to:

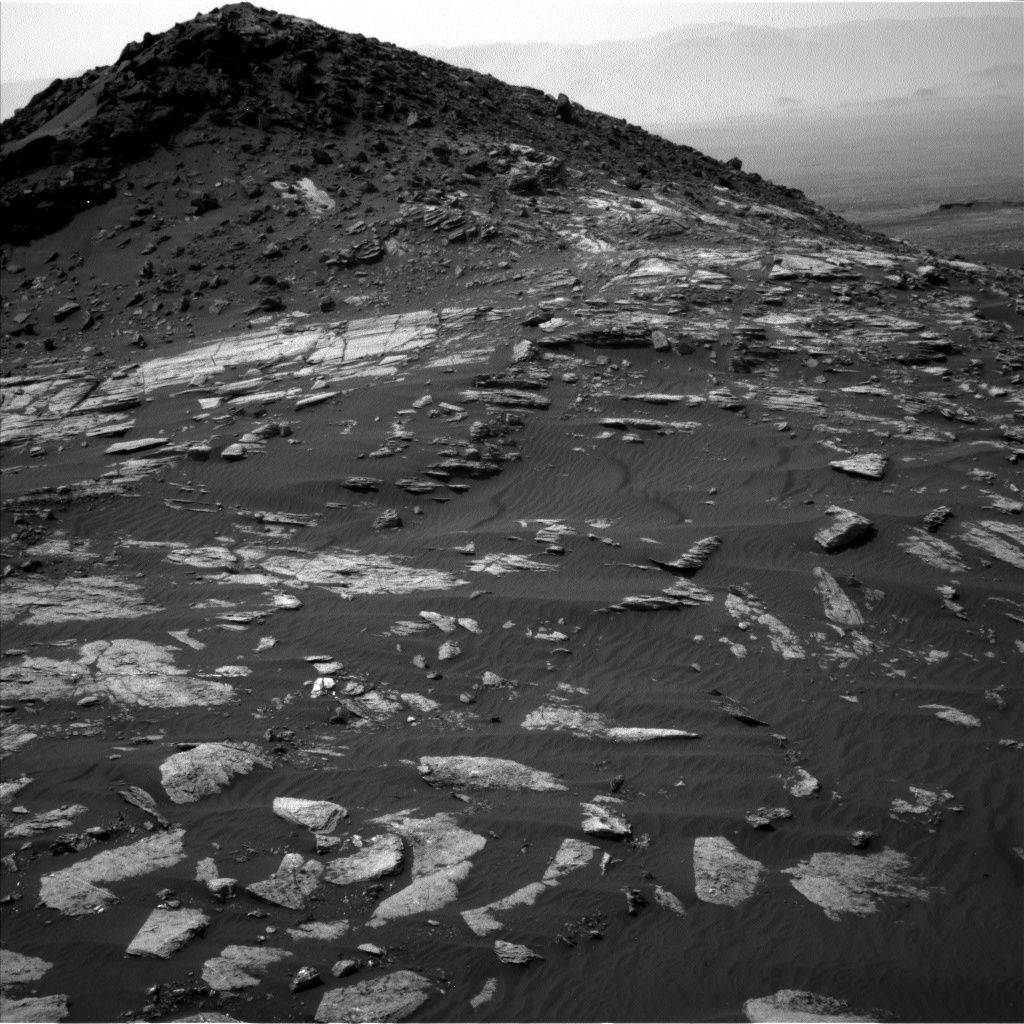
Ireson Hill as imaged by Curiosity’s Navcam Left B om Sol 1608, February 13, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover is carrying out Sol 1609 duties on Mars, driving over 30 feet (9 meters) on Sol 1608.
That drive has placed the robot closer to Ireson Hill, making it possible to image dark blocks that have tumbled down from the top of the hill.
Dark blocks
“Two of these blocks are within reach of the arm, but both are challenging targets,” reports Ken Herkenhoff of the USGS Astrogeology Science Center. Even the name chosen for the dark block is difficult: “Passagassawakeag.”
Curiosity Front Hazcam Right B image taken on Sol 1608, February 13, 2017.
Credit: NASA/JPL-Caltech
Herkenhoff adds that this block is pointier than scientists would like for contact science, and the other dark block, dubbed “Perry” is close enough to the rover that there is a risk of collision with the arm.
Arm action
Complicating the plan further, Herkenhoff points out, is that the best time to take Mars Hand Lens Imager (MAHLI) images of these targets is late in the afternoon, when they won’t be shadowed by the arm.
However, the last chance to send data to Earth in time to make them available for planning is earlier in the afternoon, making it difficult to return all of the data needed to respond to a possible arm fault.
Safe distance
“Therefore, we decided to acquire a single MAHLI image of Passagassawakeag from a safe distance of 5 centimeters before the critical communications opportunity, and send it in case the full suite of MAHLI images of Perry planned later in the afternoon is not successful,” Herkenhoff says. Doing so, science teams would be better able to plan contact science on Perry in the near-term, if necessary.
Curiosity Mastcam Left image taken on Sol 1608, February 13, 2017.
Credit: NASA/JPL-Caltech/MSSS
According to the Sol 1609 plan, it was to start with Chemistry & Camera (ChemCam) and Right Mastcam observation of Passagassawakeag, a typical Murray bedrock exposure named “Spurwink,” and a more distant dark block called “Wassataquoik.”
Then the plan schedules Curiosity’s Right Mastcam to acquire a 3×1 mosaic of the Perry area, single images of rocks near the top of the hill named “Gonic,” “Kineo,” and “Edmunds,” followed by an 8×4-frame mosaic of the right side of the hill.
Complicated plan
Prior to the MAHLI imaging of Perry, a full suite of MAHLI images, plus extra stereo frames, is planned on Spurwink.
After all of the MAHLI activities have been completed, Herkenhoff says, the robot’s Alpha Particle X-Ray Spectrometer (APXS) is to be placed on Perry for a pair of short integrations, then placed on Spurwink for an overnight integration.
Concludes Herkenhoff: “Of course we are hoping that this complicated plan goes well!”

Tianzhou-1 supply ship is being readied for April launch.
Credit: CCTV-Plus
A key element of China’s human spaceflight program is being prepared for launch this April.
The country’s first cargo-carrying spacecraft – Tianzhou-1– has arrived at a launch site in Wenchang City of southern Hainan Province on Monday.
Shoot and ship
Tianzhou-1 can shoot and ship into Earth orbit upwards of six tons. This supply ship is integral to China’s future space station on the drawing boards for the 2020’s.
Once lofted by a Long March-7 booster from the Wenchang spaceport, the cargo ship will dock with the now-orbiting Tiangong-2 space lab and refuel that facility.

China’s cargo ship will dock with the now-orbiting Tiangong-2 space lab and refuel that facility.
Credit: CMSE
Payload ratio
In an interview on CCTV-Plus, Bai Mingsheng, chief designer of Tianzhou-1 at China Aerospace Science and Technology Corporation said: “The carrying capacity of Tianzhou-1 is designed based on the scale of the space station, in the principle of achieving the highest carrying capacity with the lowest structural weight. There is an index for the spacecraft’s carrying capacity, which is called payload ratio,” Bai said. “The payload ratio of Tianzhou-1 can reach 0.48, which is a relatively high figure in the world.”
As noted by CCTV-Plus, payload ratio refers to the ratio of the cargo weight to the weight of the spacecraft. A high payload ratio means high carrying capacity of the spacecraft. The figure is higher than that of the existing spacecraft of Japan and some European countries.
Verifying technology
Tianzhou-1 spacecraft will latch up with the orbiting Tiangong-2 space lab. That lab late last year hosted two astronauts for China’s longest human spaceflight mission.
The supply craft will refuel the space lab, verifying the technology needed for on-orbit transfer of liquid propellant – one of the key technologies required in assembling and maintaining China’s future space station.

China’s 60-ton medium-size space station for the 2020’s is depicted in this artwork.
Credit: CNSA
Two-month process
Bai said that two days after the launch of Tianzhou-1, it will dock with the Tiangong-2 space lab.
“The whole process takes about two months. After the completion of the two-month docking, we will check the status of the equipment and refill the propellant,” Bai added.
For a look at Tianzhou-1 preparations, go to these CCTV-Plus video clips:
http://l3-pv.news.cctvplus.com/2017/0213/8043031_Preview_1486991619869.mp4
http://l3-pv.news.cctvplus.com/2017/0213/8043022_Preview_1486992765374.mp4

Curiosity Front Hazcam Right B image taken on Sol 1607, February 12, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is closing out Sol 1607 activities. The robot has wrapped up work on the first stop of a second phase look at the Bagnold Dunes.
The rover’s Mastcam produced images that were repeated throughout the day to look for changes in the dunes.
Sand formations
Curiosity’s Chemistry and Camera (ChemCam) Remote Microscopic Imager (RMI) was focused on the target “Mapleton” and then Mastcam carried out a series of images of nearby sand formations.
Curiosity Mastcam Left image taken on Sol 1605, February 10, 2017.
Credit: NASA/JPL-Caltech/MSSS
“Once that was taken care of, we decided to drive back toward Ireson Hill so that we can take a closer look at some of the geology there,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
That drive equaled roughly 180 feet (55 meters) followed by post-drive imaging.
Targets of interest
In the 1605 plan, the rovers ChemCam’s laser was slated to be back in action with an analysis of the target “Carys Mills”. Mastcam was scheduled to take a supporting image of the same target, as well as a small mosaic of the target “Calderwood”.

Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, acquired this image on February 11, 2017, Sol 1606.
Credit: NASA/JPL-Caltech/MSSS
“We will then continue driving around the east side of Ireson hill toward our targets of interest, ending at a rock that may be part of the hill’s capping layer,” Anderson notes.

Curiosity rover’s location as of Sol 1605, February 10, 2017.
From Sol 1604 to Sol 1605, Curiosity had driven a straight line distance of about 71.56 feet (21.81 meters). Since touching down in Bradbury Landing in August 2012, Curiosity has driven 9.64 miles (15.52 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-CALTECH/University of Arizona
Dates of planned rover activities are always subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

