Archive for November, 2016

Curiosity Mastcam Right image taken on Sol 1521, November 15, 2016.
Credit: NASA/JPL-Caltech/MSSS
Now in Sol 1525, NASA’s Curiosity Mars rover is wheeling toward a new drill site.
Making use of the rover’s Mars Hand Lens Imager (MAHLI) some striking images have been acquired of an outcrop called “Seawall.”

Curiosity Mars Hand Lens Imager (MAHLI) image of “Seawall” taken on November 18, 2016, Sol 1523. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
According to Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona, the current plan is focused on finishing robot investigation at “Sutton Island,” and then driving towards the next drill target, roughly 30 feet (9 meters) away.
Bedrock composition
Also on tap are Navcam and Mastcam observations by the rover to monitor the opacity of the atmosphere and search for clouds.

Curiosity MAHLI image taken on November 18, 2016, Sol 1523.
Credit: NASA/JPL-Caltech/MSSS
Then the schedule includes Chemistry and Camera (ChemCam) observations of “Ironbound Island” and “Goat Trail” to assess the composition of the bedrock. Furthermore, the plan also includes several Mastcam mosaics to characterize the geometry of this deposit and document its sedimentary structures.
Curiosity is also set to acquire MAHLI images of “Ironbound Island” to characterize the more typical Murray bedrock in this area, followed by an overnight Alpha Particle X-Ray Spectrometer (APXS) integration on the same target, Edgar adds.
Systematic campaign
The weekend plan also has Curiosity drive toward the next drill target “as we continue our systematic campaign of sampling the Murray formation,” Edgar points out.

Curiosity Mastcam Right image taken on Sol 1521, November 15, 2016.
“After the drive we’ll take post-drive imaging, including workspace imaging,” Edgar notes, “to prepare for upcoming contact science and characterizing the intended drill site.”
Look for methane
Lastly, a ChemCam’s Autonomous Exploration for Gathering Increased Science (AEGIS) software is to be utilized. In addition to all of these activities, the rover will perform a Sample Analysis at Mars (SAM) Instrument Suite atmospheric observation to look for methane.
Concludes Edgar: “Quite the weekend for Curiosity!”

Shenzhou-11 crew back on Earth.
Credit: CCTV-Plus
The crew of Shenzhou-11, following a 33-day space trek, returned safely to Earth on November 18th.
Chinese astronauts Jing Haipeng and Chen Dong landed safely in north China’s Inner Mongolia Autonomous Region on Friday.
Recovery teams
As viewed on CCTV, recovery of the crew took longer than expected due to spacecraft touchdown in a different spot than where ground teams were pre-positioned. Recovery personnel found the capsule in a sideways position.
The returning space travelers opened the capsule’s hatch by themselves after the reentry module landed. According to the Beijing Aerospace Control Center, the return capsule was found by the ground search team in the main landing area.
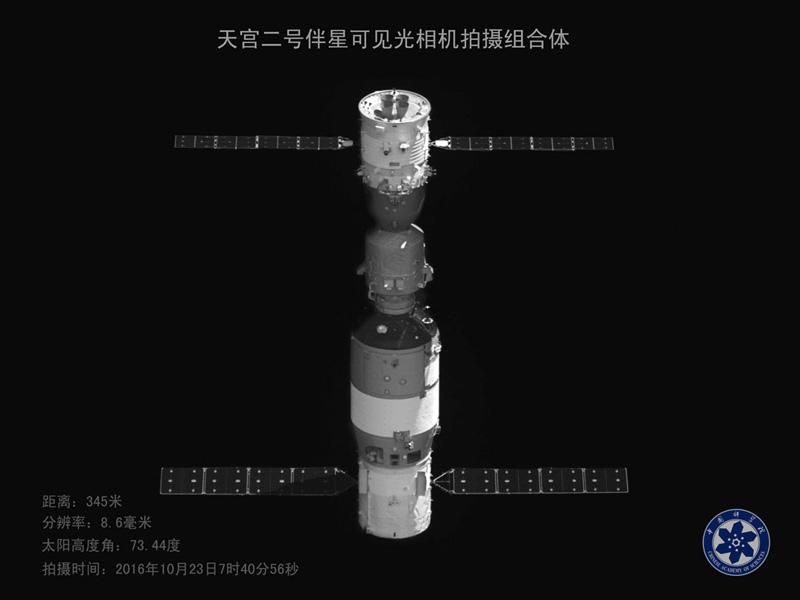
Image snagged by the Banxing-2 microsatellite that was deployed from the Tiangong-2 shows Shenzhou-11 (above) and Tiangong-2 docked in orbit on October 23, 2016.
Credit: Chinese Academy of Sciences via GBTimes
Longest mission to date
Shenzhou-11 was China’s sixth manned spacecraft, and also the country’s longest mission to date. After the Shenzhou-11 liftoff on October 17, the spacecraft docked two days later with China’s Tiangong-2 space lab. The two astronauts lived and worked in the lab for 30 days.
Chinese space officials hailed the mission as a key step toward China’s aim of building a permanently crewed space station in the 2020s.
Space station work ahead
As reported by CCTV-Plus, the core module of China’s space station is expected to be launched around 2018, and the space station will start full service around 2022, with an initial designed service lifespan of at least 10 years.
That larger orbiting complex will accommodate three to six astronauts for space flights up to one year.

China’s 60-ton medium-size space station is depicted in this artwork.
Credit: CNSA
The Tiangong-2 space lab remains operating in orbit following Shenzhou-11’s departure. China’s first cargo spacecraft — Tianzhou-1– is scheduled to be launched in April 2017, docking with the space lab in an effort to certify in-space refueling technology.
Declared success
Following the Shenzhou-11 landing, Zhang Youxia, commander-in-chief of China’s manned space program declared: “According to a report from the main landing site headquarters, the return module of spacecraft Shenzhou-11 has landed safely. The two astronauts are in good physical conditions. Now I announce that the manned mission of Tiangong-2 and Shenzhou-11 is a complete success.”
That announcement was followed by Zhang Gaoli, Chinese Vice Premier, stating:
“The complete success of Tiangong-2 and Shenzhou-11 mission marks a fresh major progress in China’s manned space program, the latest achievement in building an innovative country and a strong power in science and technology and the latest achievement of the Chinese people in scaling the height of the world.”

Inside Tiangong-2 as crew members carry out experiments.
Credit: CCTV
Onboard experiments
During the orbital linkup between Shenzhou-11 and the Tiangong-2, mission highlights included testing the transportation of personnel and materials between Earth and Tiangong-2 as well as the meeting, docking and return processes; aerospace medical experiments, space science investigations and in-orbit maintenance.
The two astronauts also carried out a trio of experiments that included raising silkworms in space, designed by middle school students from the Hong Kong Special Administrative Region.
It was the third space mission for the 50-year-old astronaut veteran Jing Haipeng, commander of the crew, who also flew earlier in the Shenzhou-7 and Shenzhou-9 missions.

Shenzhou-11 crew arrived in Beijing on Friday night (local time) at the Xijiao Military airport.
Credit: CCTV-Plus
For the 38-year old Chen Dong, it was his first space mission.
Jing and Chen arrived in Beijing on Friday night at the Xijiao Military airport. They got off the plane sitting in soft chairs, still adapting to Earth’s gravity after spending more than 30 days in microgravity.
With the help of medical staff and other assistants, the astronauts left the airport for the Beijing Aerospace City, reports CCTV-Plus.
Video highlights
Take a look at these videos showing various stages of the Shenzhou-11 departure from space and subsequent landing:
http://cd-pv.news.cctvplus.com/2016/1118/8036826_Preview_7559.mp4
http://pv.news.cctvplus.com/2016/1118/8036840_Preview_7351.mp4
http://l3-pv.news.cctvplus.com/2016/1118/8036855_Preview_1479473421425.mp4
http://l3-pv.news.cctvplus.com/2016/1118/8036860_Preview_1479481281961.mp4

Shenzhou-11 crew consists of two male astronauts, veteran space traveler, Jing Haipeng (left) and newcomer to space, Chen Dong.
Crew photos: ChinaSpaceflight.com
Two Chinese astronauts have entered the Shenzhou-11 reentry module to prepare for their return to the Earth.
Space travelers Jing Haipeng and Chen Dong have lived and worked in the Tiangong-2 space lab for 30 days, the longest stay in Earth orbit by Chinese astronauts.

Credit: CCTV America
Separation process
Prior to the separation of Shenzhou-11 with the space lab, the astronauts transferred experimental devices and items from Tiangong-2 to the spacecraft’s re-entry module.
“The entire separation process was very smooth. Both Tiangong and the spacecraft completed their designated moves, and the process to start operation was quite normal,” reported Chen Xianfeng, director of overplan office of Beijing Aerospace Control Center.

Credit: CCTV
Status check
In an interview with CCTV-Plus, Chen added that during the course of separation, the 30-meter stop, the 120-meter stop, the final separation and the move for spacecraft to reset flight, “all the moves were very good.”
“Both Tiangong and Shenzhou are in a normal state at present and various missions are going smoothly,” said Chen.
After the separation, Shenzhou-11 is scheduled to fly to a position 120 meters away from Tiangong-2. Once at that distance, the two-person craft will stay in orbit until ground control teams evaluate its status, and then give the final go for the crew to gradually depart the neighboring space lab.
Image snagged by the Banxing-2 microsatellite that was deployed from the Tiangong-2 shows Shenzhou-11 (above) and Tiangong-2 docked in orbit on October 23, 2016.
Credit: Chinese Academy of Sciences via GBTimes
Reentry point
“Tonight we will conduct an orbit control to the spacecraft to take aim at the re-entry point, because after the separation, there will be a separating force between the spacecraft and Tiangong, which will cause a tiny deviation from the orbit. We have to readjust to make the re-entry control more accurate,” explained Chen to CCTV-Plus.
Around one day later, the re-entry module will descend from an orbit about 244 miles (393 kilometers) above Earth.
The spacecraft is expected to touch down in the Siziwang Banner in north China’s Inner Mongolia Autonomous Region.
The Tiangong-2 space lab is remaining in its orbit, carrying out remote experiments.
In April 2017, China’s first cargo spacecraft – the Tianzhou-1 — will be launched via a Long March 7 to dock with the space lab.
For video views of the Shenzhou-11 crew preparing for reentry to Earth, go to:
http://l3-pv.news.cctvplus.com/2016/1117/8036789_Preview_1479386963751.mp4
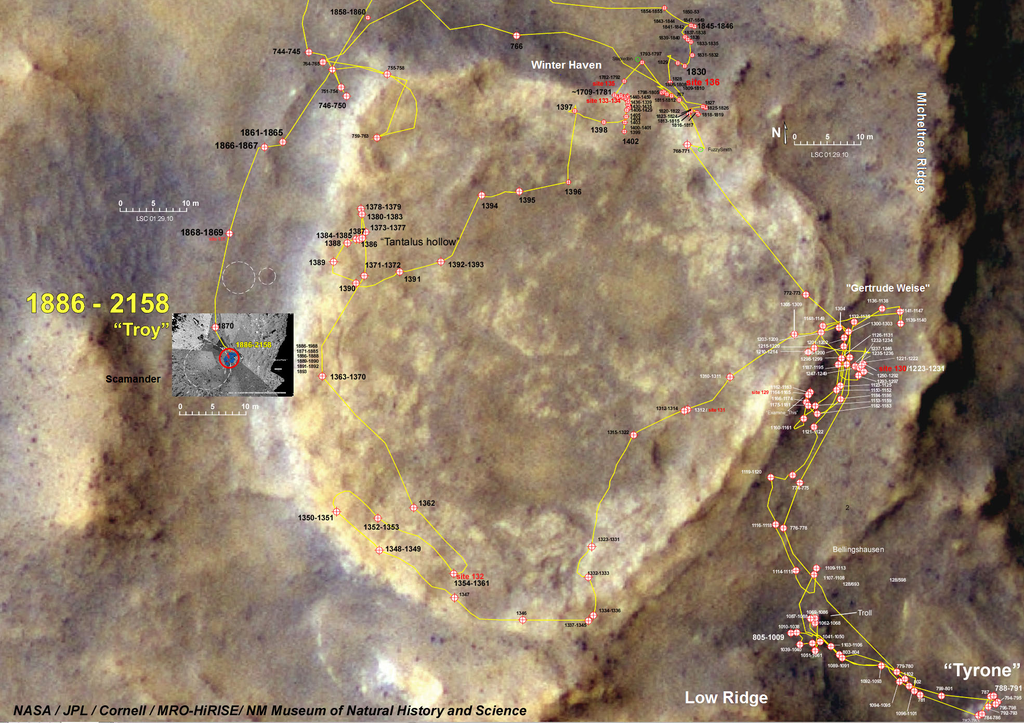
Spirit’s concluding journey around Home Plate and ending location.
NASA/JPL-Caltech/Cornell – NASA
During its wheeled treks on the Red Planet, NASA’s Spirit rover may have encountered a potential biosignature of past life on Mars, report scientists at Arizona State University.
To help make their case, the researchers have contrasted Spirit’s study of “Home Plate” — a plateau of layered rocks that the robot explored during the early part of its third year on Mars – with features found within active hot spring/geyser discharge channels at El Tatio in northern Chile.
The work has resulted in a provocative paper: Silica deposits on Mars with features resembling hot spring biosignatures at El Tatio in Chile.

A portion of the volcanic hydrothermal system at El Tatio in Chile.
Credit: ASU/Ruff & Farmer
Field work
As reported online in Nature Communications, field work in Chile by the ASU team, Steven Ruff and Jack Farmer in the School of Earth and Space Exploration at Arizona State University in Tempe, show that the nodular and digitate silica structures at El Tatio that most closely resemble those on Mars include complex sedimentary structures produced by a combination of biotic and abiotic processes.
“Although fully abiotic processes are not ruled out for the Martian silica structures, they satisfy an a priori definition of potential biosignatures,” they report.
Ancient setting
The Mars rover Spirit encountered outcrops and regolith composed of opaline silica (amorphous SiO2nH2O) in an ancient volcanic hydrothermal setting in Gusev crater.

Image shows the location of Spirit rover on September 29, 2006. Toward the top of the image is “Home Plate,” a plateau of layered rocks that Spirit explored during the early part of its third year on Mars. Spirit itself is clearly seen just southeast of Home Plate. Also visible are the tracks made by the rover. Image was taken by the Mars Reconnaissance Orbiter’s HiRISE instrument.
Credit: NASA/JPL-Caltech/University of Arizona
An origin via either fumarole-related acid-sulfate leaching or precipitation from hot spring fluids was considered possible. “However, the potential significance of the characteristic nodular and mm-scale digitate opaline silica structures was not recognized,” Ruff and Farmer note.

Home Plate opaline silica occurs in nodular masses with digitate structures that resemble those at El Tatio.
Credit: ASU/Ruff & Farmer
El Tatio: Mars-like conditions
The physical environment of El Tatio offers a rare combination of high elevation, low precipitation rate, high mean annual evaporation rate, common diurnal freeze-thaw and extremely high ultraviolet irradiance.
“Such conditions provide a better environmental analog for Mars than those of Yellowstone National Park (USA) and other well-known geothermal sites on Earth,” suggest Ruff and Farmer. “Our results demonstrate that the more Mars-like conditions of El Tatio produce unique deposits, including biomediated silica structures, with characteristics that compare favorably with the Home Plate silica outcrops. The similarities raise the possibility that the Martian silica structures formed in a comparable manner.”

Spirit imagery shows opaline silica nodular outcrops adjacent to Home Plate showing typical stratiform expression.White outline highlights nodular silica outcrop. Rover wheel tracks are roughly one meter apart. Rolling wheels did not deform the roughly15 centimeter high outcrop (lighter tracks) compared with the inoperative dragging wheel in a later traverse (darker track).
Credit: ASU/Ruff & Farmer
Biosignature definition
Previously, a NASA science team defined a potential biosignature as “an object, substance and/or pattern that might have a biological origin and thus compels investigators to gather more data before reaching a conclusion as to the presence or absence of life.”
“Because we can neither prove nor disprove a biological origin for the microstromatolite-like digitate silica structures at Home Plate, they constitute a potential biosignature according to this definition,” Ruff and Farmer comment.
Spirit of Future exploration
The Spirit rover bogged down on Mars in May 2009, becoming stuck in soft soil.
In late January 2010, after months of attempts to free the rover, NASA dubbed the wheeled robot mission a stationary research platform. The lack of mobility and the harsh climes of Mars conspired to seal the fate of the robot, with attempts to regain contact with the robot ending in May 2011. Subsequently, NASA announced the end of contact efforts and the completion of Spirit’s mission.

Spirit of exploration – NASA rover.
Credit: NASA/JPL
The ASU researchers suggest that a future and specially-instrumented rover mission could perhaps provide a more definitive assessment of possible biogenicity of Home Plate silica structures.
“However, because of the challenges in obtaining unambiguous evidence in situ, coordinated microscopic and compositional analyses of samples returned to laboratories on Earth may be required to reach a robust conclusion as to the presence or absence of past Martian life in these rocks,” Ruff and Farmer state.
Their work – Silica deposits on Mars with features resembling hot spring biosignatures at El Tatio in Chile – has been published online in Nature Communications, dated November 17, 2016.
It can be viewed here: http://www.nature.com/articles/ncomms13554

Shenzhou-11 crew onboard the Tiangong-2 space lab.
Credit: CCTV-Plus
China’s two-person space crew is preparing for a return to Earth, drawing to a close a month-long stint onboard their Tiangong-2 space lab.
According to GBTimes, airspace restriction indicates that the Shenzhou-11 return capsule is expected to land Friday, November 18 between 05:33 – 06:13 universal time (00:33 – 01:13 EST / 13:33 – 14:13 Beijing time).
Shenzhou-11 crew consists of two male astronauts, veteran space traveler, Jing Haipeng (left) and newcomer to space, Chen Dong.
Crew photos: ChinaSpaceflight.com
National record
Shenzhou-11 mission astronauts Jing Haipeng and Chen Dong are reportedly in good health as their national record month-long stay onboard Tiangong-2 nears a successful conclusion.
Launched on October 17, the Shenzhou-11 crew will have remained in space for 33 days.

The mission of Shenzhou-11 is a key to improve space station building techniques.
Credit: CCTV
Projected touchdown site
Meanwhile, ground teams in China have wrapped up the last comprehensive search and rescue exercise prior to Shenzhou-11’s projected touchdown in north China’s Inner Mongolia Autonomous Region.
In a CCTV-Plus interview with Li Quan, commander, major landing site system, Li said that “the entire exercise was designed according to actual-combat situation. All the participating units cooperated closely during the exercise.”
Search and rescue exercise
The search and rescue, Li added, “turned to be prompt and accurate, and the astronauts and the return capsule were handled in a scientific and reasonable manner. We can say after this exercise, the various systems of the major landing site have been proved to be capable of accomplishing the mission.”
The ground team carried out other exercise duties, CCTV-Plus reports, including extracting the astronauts from their capsule, medical monitoring and support, as well as on-site disposal of the return capsule and escorting the astronauts.
To view a video of pre-landing preparations, go to:
http://l3-pv.news.cctvplus.com/2016/1116/8036691_Preview_1479300626345.mp4

Curiosity Mastcam Left image taken on Sol 1519, November 13, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover is now in Sol 1521 and is “continuing to make steady progress,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona. There have been successful drives of the robot “interspersed with plenty of good science,” he adds.
In a Sol 1516 plan, scientists started off with a Mastcam mosaic of “West Mesa” to study the stratigraphy, followed by a big 5×5 point Chemistry & Camera (ChemCam) analysis on the nodular target “Ship Island.”

Curiosity Navcam Left B image taken on Sol 1519 November 13, 2016.
Credit: NASA/JPL-Caltech
Laser shots
In appraising that target, ChemCam has carried out more than 400,000 laser shots!

Zap patrol: The Laser-Induced Remote Sensing for Chemistry and Micro-Imaging instrument will identify atomic elements in martian rocks.
Credit: NASA/JPL-Caltech/LANL/J.-L. Lacour, CEA
ChemCam looks at rocks and soils from a distance, then fires a laser and analyzes the elemental composition of vaporized materials from areas smaller than 1 millimeter on the surface of Martian rocks and soils.
An on-board spectrograph provides unprecedented detail about minerals and microstructures in rocks by measuring the composition of the resulting laser-produced plasma — an extremely hot gas made of free-floating ions and electrons.
ChemCam has been also used to analyze the target “Stave Island” and Mastcam documented both targets as well as the auto-targeted location from Sol 1514.

Curiosity Navcam Right B image taken on Sol 1519 November 13, 2016.
Credit: NASA/JPL-Caltech
Interesting dark rocks
Curiosity’s Mastcam rounded out the science block with a small mosaic of some interesting dark rocks, Anderson notes.
After that, Curiosity drove, and ChemCam did another auto-targeted observation.
Sol 1517 was pretty simple, with a Mastcam image of the rover deck, Navcam atmospheric monitoring, and a twilight image taken by the rover’s Mars Descent Imager (MARDI).
Workplace mosaic
“The Sol 1516 drive brought us to a sandy location, so the Sol 1518 plan takes advantage of that location to study the sand,” Anderson explains.
The plan starts out with Mastcam observations to monitor the amount of dust in the atmosphere, followed by ChemCam observations of “Folly Island”, “Burnt Porcupine,” “Hadley Point,” and “Old Whale Ledge.”
Curiosity’s Mastcam was slated to document all of those targets and also has an observation to extend the mosaic of the workspace.

Curiosity Mastcam Right image taken on Sol 1518, November 12, 2016.
Credit: NASA/JPL-Caltech/MSSS
Sandy targets
With that remote sensing done, the rover’s Mars Hand Lens Imager (MAHLI) was on tap to image “Folly Island” and the sandy targets “Sheep Porcupine” and “Bald Porcupine.”
The robot’s Alpha Particle X-Ray Spectrometer (APXS) is scheduled to measure Sheep Porcupine and Bald Porcupine. Late in the day, Mastcam will repeat the observations of atmospheric dust.
On Sol 1519, the plan was to carry out a short drive with the usual post-drive imaging, and ChemCam will do another automated observation.

Curiosity ChemCam Remote Micro-Imager image taken on Sol 1520, November 14, 2016.
Credit: NASA/JPL-Caltech/LANL
Distant imaging
Sol 1520 was an untargeted Sol, so scientists focused on imaging distant targets.
Mastcam has on tap creating a mosaic of the upcoming “Hematite Ridge,” ChemCam has a long-distance Remote Micro-Imager (RMI) of Mt. Sharp, and NavCam will look to the northern horizon to measure the dust in the atmosphere, Anderson concludes.

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on November 12, 2016, Sol 1518.
Credit: NASA/JPL-Caltech/MSSS
Traverse map
Meanwhile, Curiosity’s traverse map through Sol 1519 has been issued.
This map shows the route driven by NASA’s Mars rover Curiosity through the 1519 Martian day, or sol, of the rover’s mission on Mars (November 14, 2016).

The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Numbering of the dots along the line indicate the sol number of each drive. North is up.
The scale bar is one kilometer (roughly 0.62 mile).
From Sol 1516 to Sol 1519, Curiosity has driven a straight line distance of about 105.88 feet (32.27 meters), bringing the rover’s total odometry for the mission to 9.31 miles (14.98 kilometers).
Curiosity landed on Mars in August of 2012.

Earth’s Moon as seen from the International Space Station taken by ESA British astronaut, Tim Peake.
Credit: NASA/ESA
An impressive roster of papers dedicated to using space resources to facilitate space science and exploration is now available within the pages of the journal, Space Policy.

Resources aplenty given near-Earth objects (NEOs).
Credit: Texas A&M
These papers are peer-reviewed versions of papers presented at the Royal Astronomical Society specialist discussion meeting on the topic that was held in London in April.

Road map to the Moon, ESA-style.
Credit: ESA
Papers available
— James Carpenter, Richard Fisackerly, Berengere Houdou (2016)
Establishing lunar resource viability
Space Policy 37, 52-57
— Ian A. Crawford (2016)
The long-term scientific benefits of a space economy
Space Policy 37, 58-61
— Colin R. McInnes (2016)
Near Earth asteroid resource utilization for large in-orbit reflectors
Space Policy 37, 62-64
— Martin Elvis (2016)
What can space resources do for astronomy and planetary science?
Space Policy 37, 65-76
— Philip T. Metzger (2016)
Space development and space science together, an historic opportunity
Space Policy 37, 77-91
— Vibha Srivastava, Sungwoo Lim, Mahesh Anand (2016)
Microwave processing of lunar soil for supporting longer-term surface exploration on the Moon
Space Policy 37, 92-96
— Thomas Marshall Eubanks, Charles F. Radley (2016)
Scientific return of a lunar elevator
Space Policy 37, 97-102
— George F. Sowers (2016)
A cislunar transportation system fueled by lunar resources
Space Policy 37, 103-109

Credit: Planetary Resources, Inc.
Resources:
Go to this link to view the Space Policy papers:
http://www.sciencedirect.com/science/article/pii/S0265964616300327
Go to “download pdf” at the top of the page and then select “article plus other articles in this issue.”
Note: An “Executive Summary” of the London meeting itself is available at:
http://www.homepages.ucl.ac.uk/~ucfbiac/Space_Resources_Meeting_Report.pdf

Long March-11 liftoff.
Credit: CCTV-Plus
China has successfully launched a satellite to test pulsar detectors.
The satellite is slated to conduct experiments on X-ray pulsar navigation. The test pulsar satellite was placed in a Sun synchronous orbit.
The satellite was lofted from the Jiuquan Satellite Launch Center, China on November 10th onboard a Long March-11 carrier rocket, which is a solid propellant rocket.
Navigation technology
“This pulsar satellite is our country’s first in-orbit navigation testing satellite,” said Xue Lijun, chief designer of the pulsar project of the No.5 Institute of the China Aerospace Science and Technology Corporation.
“Apart from the testing, we will use the two detectors to collect periodic X-ray signals, so as to test the theory of the in-orbit navigation technology,” said Xue in an interview carried on CCTV-Plus.
Four micro-satellites were also launched along with the test pulsar satellite

Credit: YANNAING PYI SONE AUNG
Debris from launch?
Although not confirmed, there have been reports that objects related to the Chinese launch may have fallen into a jade mining area in north Myanmar. One large chunk of junk is some 15 feet long (4.5 meters) and 4 feet (1.2 meters) wide.
Yet another piece of metal with Chinese writing on it fell through the roof of a neighboring house at roughly the same time.
No injuries were reported, and whether the debris is indeed related to the rocket launch has not been established.
To view a video of the spacecraft launch, go to:
http://cd-pv.news.cctvplus.com/2016/1110/8036284_Preview_5465.mp4

Deployed micro-satellite is monitoring the combined Tiangong-2/Shenzhou-11 vehicles.
Credit: CCTV
China’s ongoing piloted space mission is rounding the corner on a month-long mission, with two crewmen living onboard the country’s Tiangong-2 space lab.
The 49-year-old Jing Haipeng and 37-year-old Chen Dong went into the space on Shenzhou-11 manned spacecraft on October 17th, docking with the Tiangong-2 two days later.
As of Wednesday, two Chinese astronauts have been onboard the space lab for 22 days.
Credit: CCTV-Plus
Experiments underway
Wu Dawei, director, overall plan office, Beijing Aerospace Flight and Control Center reports on a CCTV-Plus interview: “The astronauts are in excellent shape. They have completely adapted to the space environment after going through the initial period in the space. They now eat well, sleep well, and work well. As for food, they are very pleased with the food this time. They sleep very well, about seven hours daily. That’s their current condition.”
Wu said that the experiments onboard Tiangong-2 are proceeding as planned, and the space duo have finished about nine or ten of them. “The remaining ten plus experiments will be finished in the coming week.”

General Secretary of the Communist Party of China (CPC) Central Committee Xi Jinping — also Chinese president and chairman of the Central Military Commission — called the two astronauts aboard the Tiangong-2 space lab from the command center of China’s manned space program.
Credit: CCTV-Plus
Presidential call
General Secretary of the Communist Party of China (CPC) Central Committee Xi Jinping — also Chinese president and chairman of the Central Military Commission — called the two astronauts aboard the Tiangong-2 space lab from the command center of China’s manned space program on Wednesday.
Before making the call, Xi watched the brain-computer interaction in-orbit repair experiment on Tiangong-2 at the Command Center.
Arm work
Reports CCTV-Plus, the Tiangong-2 space lab is equipped with an in-orbit repair robotic arm terminal operation system, which is used by astronauts to test the brain-computer interaction in-orbit repair technology that will allow astronauts to control equipment with their thoughts rather than manually.
The system, over 4 feet long (1.35 meters) includes the human-simulated robotic arm, human-simulated robotic hand, binocular global camera, hand-eye camera, controller, data glove and three-dimensional mouse.
The size of the human-simulated robotic hand conforms to the size of the hand of the astronauts in extravehicular spacesuit.

Shenzhou-11 crew is now onboard the Tiangong-2 space lab for the country’s longest piloted space mission.
Credit: CCTV-Plus
Robotic servicing
Billed as the first such experiment in the world, it was jointly developed by the fifth institute of the China Aerospace Science and Technology Corporation (CASC), the Harbin Institute of Technology, and the Beijing Institute of Technology.
The experiment verifies the in-orbit technology of the core parts of the robotic arm, exploring the brain-computer interaction mode to accumulate experience of space robots working in orbit.
During the experiment, the robotic hand will simulate the typical moves of dismantling the thermal insulation materials, unscrewing the electric plug, and using electric tools to turn the screws in the orbit.
Other tests include robotic joint stiffness in-orbit identification and grasping floating balls, reports CCTV-Plus.

Credit: CSU
Lettuce, silkworms
As of Wednesday, astronauts Jing and Chen have been onboard the space lab for 22 days.
During their stay, the space travelers have carried out experiments like planting nine lettuces and raising silkworms, in addition to in-orbit maintenance of spacecraft.
Jing and Chen are expected to stay in the space for 33 days. They work six days a week in line with schedules on the ground during this longest piloted mission for China.
The astronauts have a menu with nearly one hundred dishes for their meals. Their menu changes every day for a 5-day period. They also can watch news programs, football games and documentaries in the space lab, a space lifestyle that includes an exercise program.
For a video update on the mission, go to:
http://cd-pv.news.cctvplus.com/2016/1109/8036255_Preview_1478694818274.mp4
http://cd-pv.news.cctvplus.com/2016/1109/8036251_Preview_1478692556787.mp4

Curiosity Front Hazcam Right B image taken on Sol 1513, November 7, 2016.
Credit: NASA/JPL-Caltech
Now in Sol 1514, NASA’s Curiosity Mars rover successfully completed a menu of scientific duties throughout last weekend.
The robot carried out observations of its surroundings and wheeled itself over 141 feet (43 meters).
Science block
In carrying out a two sol plan, Curiosity is to start out with a brief contact science block, reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.

Curiosity’s Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, took this image on November 6, 2016, Sol 1512.
Credit: NASA/JPL-Caltech/MSSS
Using the Mars Hand Lens Imager (MAHLI), the robot will observe the target “Southwest Harbor.” After that, the plan calls for a remote sensing block.
The rover’s Chemistry & Camera (ChemCam) instrument is to observe some nodules in the targets “Asticou” and “Bass Harbor Head.”
Curiosity’s Mastcam is slated to document those targets, as well as the Sol 1513 ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) software target.
Cross-bedding
Mastcam also will take images of a laminated target called “Halls Quarry”, some nearby blocks called “Baker Island” and “Acadia”, and some cross-bedding in the target “Seal Harbor.”

Curiosity Mastcam Right image taken on Sol 1512, November 6, 2016.
Credit: NASA/JPL-Caltech/MSSS
After the remote sensing block, the rover will drive and then do post-drive imaging and a ChemCam AEGIS observation.
On Sol 1515, ChemCam has a passive sky observation, and Navcam has a couple of atmospheric monitoring observations, adds Anderson.
As of Sol 1512, Curiosity has driven 9.24 miles (14.88 kilometers) since touching down on the Red Planet in August 2012.
Dates of planned rover activities described are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

