Archive for August, 2016
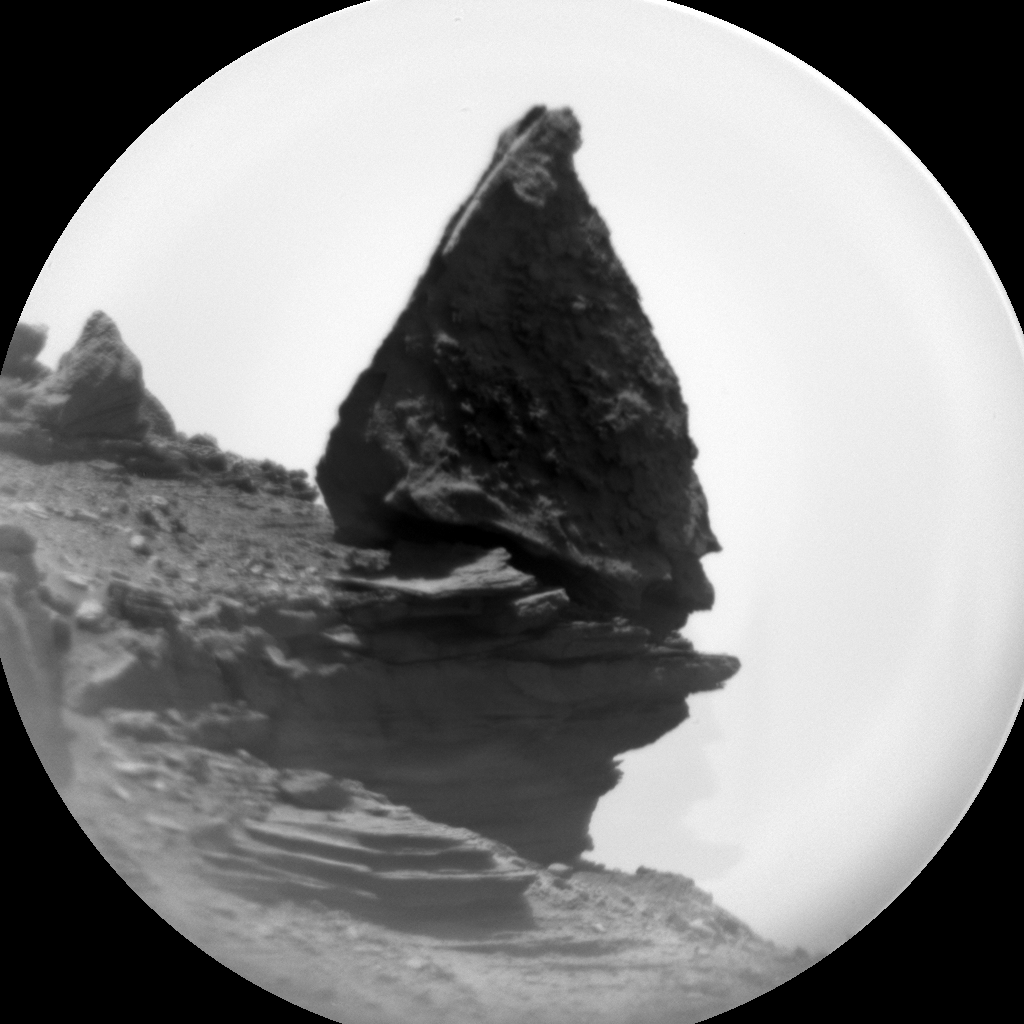
Look out below! Curiosity ChemCam Remote Micro-Imager photo of balancing boulder taken on Sol 1428, August 12, 2016.
Image Credit: NASA/JPL-Caltech/LANL
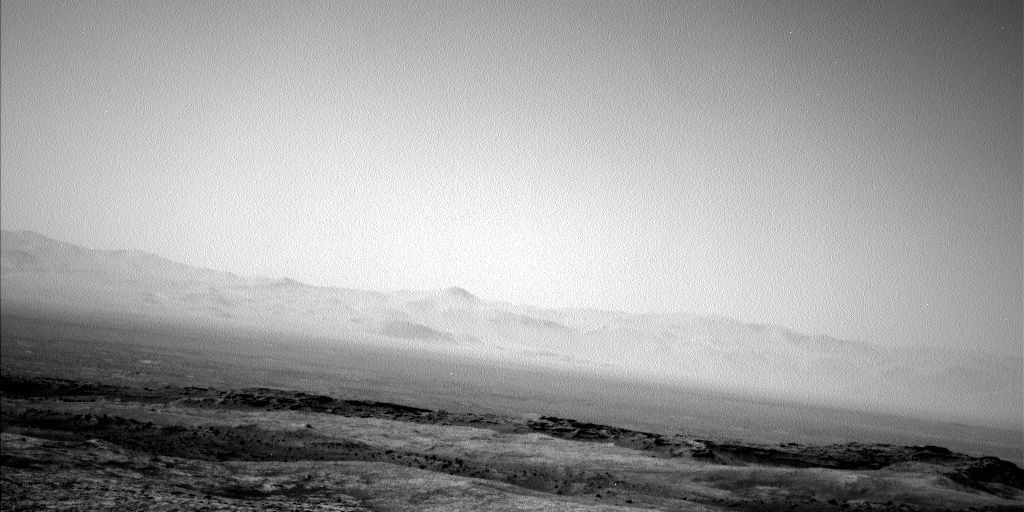
NASA’s Curiosity Mars rover is now at work on Sol 1432, returning some terrific landscape imagery.
According to Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona, the rover’s weekend plan went well.
Add on to the robot’s current activities a drive of some 170 feet (52 meters) across a patch of sand.
Boulder balancing act
Curiosity’s Chemistry & Camera (ChemCam) instrument is on tap to observe the target “Longa” and Mastcam has two mosaics of the nearby buttes, Anderson notes.
A recent ChemCam Remote Micro-Imager (RMI) image shows a precariously balanced rock – a feature seen earlier but the new image catches its hazardous-looking situation.

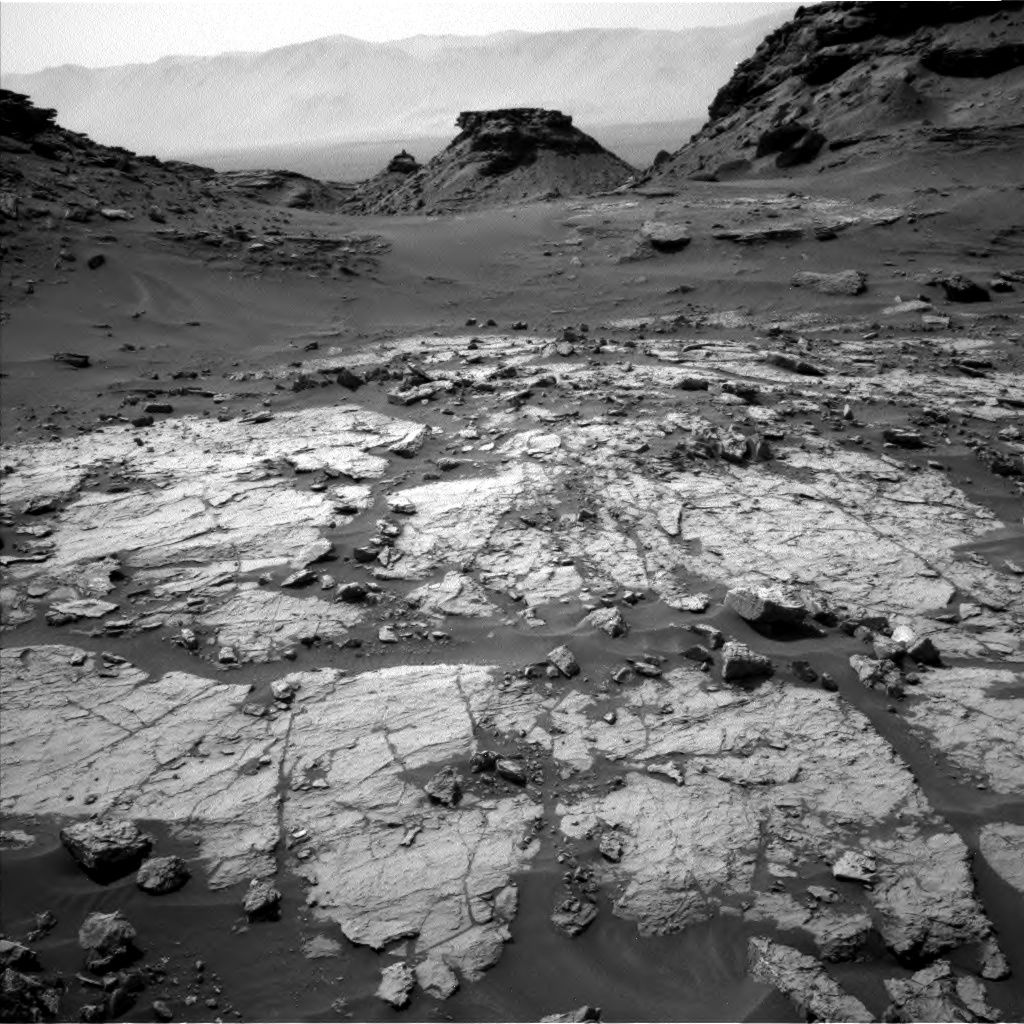
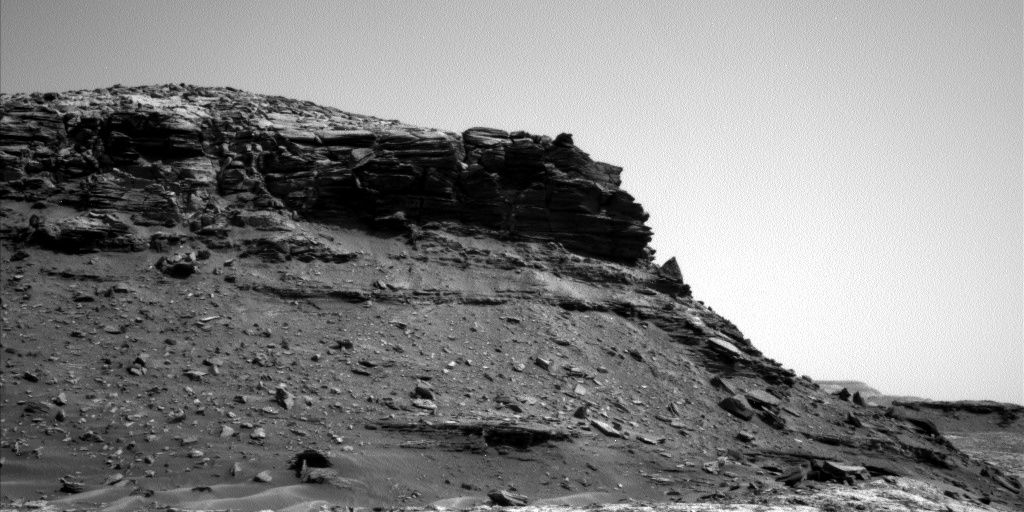
Panorama of the “Murray Buttes” shows a boulder that appears to be precariously balanced.
Curiosity Mastcam Right image taken on Sol 1387 July 1, 2016.
Credit: NASA/JPL-Caltech/MSSS
Beautiful buttes
After the rover’s drive, post-drive imaging is scheduled, and some onboard data processing of Mars Hand Lens Imager (MAHLI) images of the “Marimba” drill hole, as well as some Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) data processing are also in the plan.

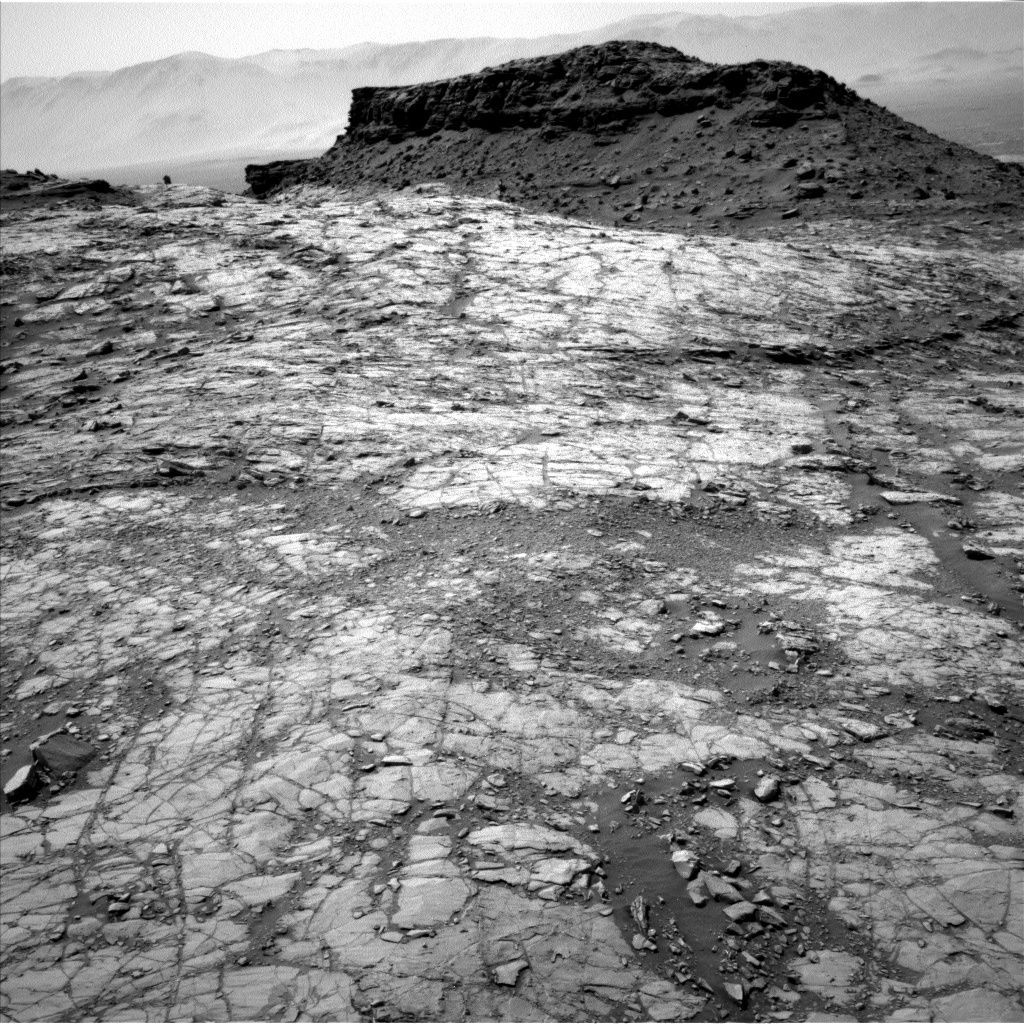
Curiosity Mastcam Right image taken on Sol 1429, August 13, 2016.
Credit: NASA/JPL-Caltech/MSSS
In the morning of Sol 1433, the script calls for atmospheric observations with Curiosity’s Navcam and Mastcam, “although one of them had to be removed from the plan,” Anderson notes, “when we realized that one of the nearby buttes was blocking our view of the crater rim!”
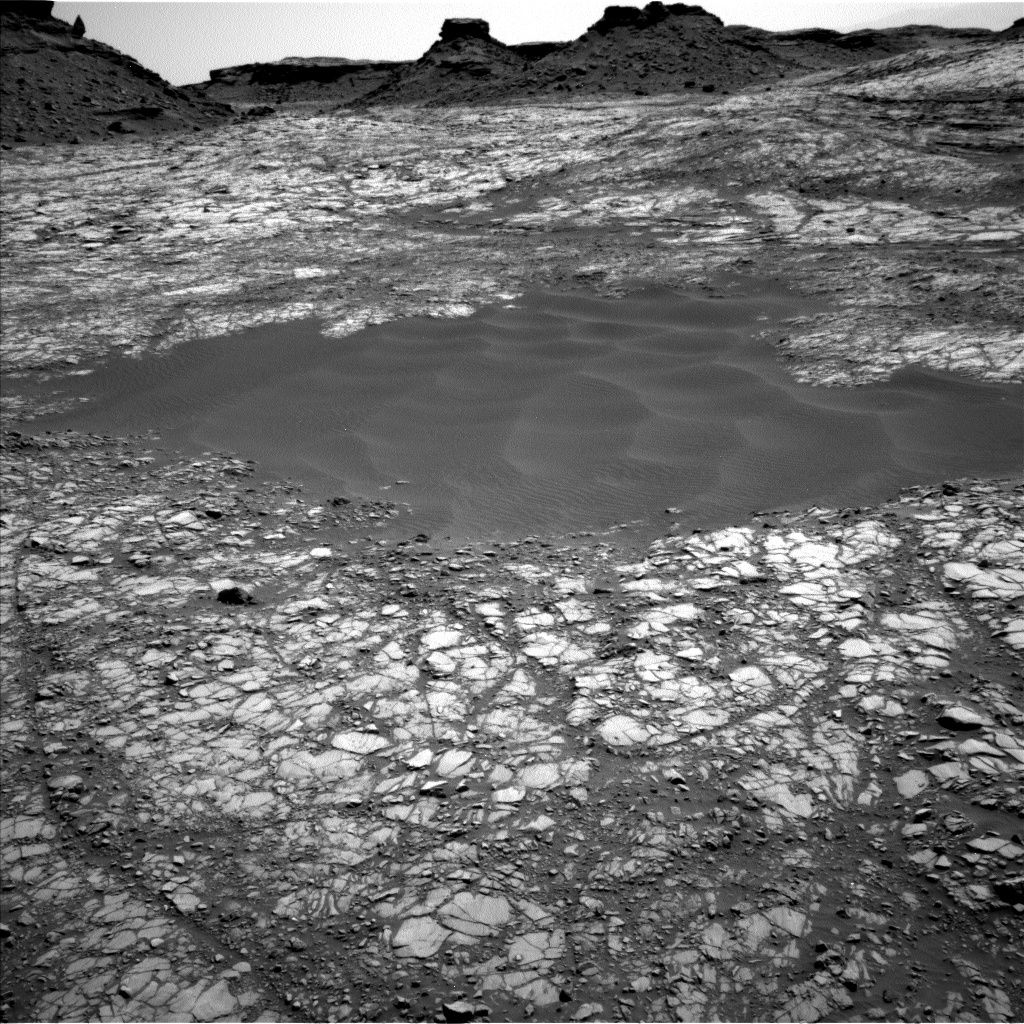
Curiosity Navcam Left B image taken on Sol 1432, August 16, 2016.
Credit: NASA/JPL-Caltech
Credit: NAS
A just issued report has focused a critical eye on the suite of large-, medium-, and small-scale astronomy and astrophysics programs, including NASA’s Wide Field Infrared Survey Telescope (WFIRST) and the NSF/DOE’s Large Synoptic Survey Telescope (LSST).
The new report — New Worlds, New Horizons: A Midterm Assessment — gives advice on midcourse corrections to the funding agencies involved in a bevy of ground and space-based tools.
As a bottom line, the report explains that many goals outlined in an earlier decadal survey in astronomy and astrophysics have been met…but others are delayed by “unforeseen constraints.”
The report comes from a blue ribbon committee of experts pulled together under the National Academies of Sciences, Engineering, and Medicine and calls for NASA, National Science Foundation (NSF), and the U.S. Department of Energy (DOE) – the federal agencies largely responsible for funding and implementing these research activities – to maintain, and in some cases adjust, their programs in order to meet the survey’s scientific objectives.

Hubble Frontier Fields image of the galaxy cluster MACS J07175+3745. Faint blue arcs are distant galaxies that have been magnified and distorted by the light-bending gravity of the massive cluster in front of them. The six clusters observed to unprecedented depth by the Frontier Fields program serve as natural gravitational telescopes, allowing Hubble to discover galaxies back into the first half billion years of cosmic history.
Credit: NASA, ESA and the HST Frontier Fields team (STScI).
Major accomplishments
As noted in a National Academies of Sciences press statement, some of the recent major scientific accomplishments that the report highlights are:
- The first detection of gravitational waves by the NSF-funded Laser Interferometer Gravitational-Wave Observatory (LIGO)
- The NASA-funded Kepler satellite’s extraordinary discovery of diverse planets and planetary systems that indicate the possibility of more than a billion Earth-like planets among the exoplanets that are present around stars throughout the galaxy
- Success of the Atacama Large Millimeter Array (ALMA) – a huge array of radio telescopes in the Atacama desert of Chile, recommended by the 2000 decadal survey and built by NSF and a consortium of international partners.
WFIRST – dark energy
Spotlighted in the report is a look at NASA’s Wide Field Infrared Survey Telescope (WFIRST), designed to answer questions about dark energy, exoplanets, and general astrophysics.
The WFIRST scope and design have evolved to include a 2.4-meter telescope, larger infrared detectors, and an instrument called a coronagraph that enables directly imaging an exoplanet by blocking the light emitted by its parent star.
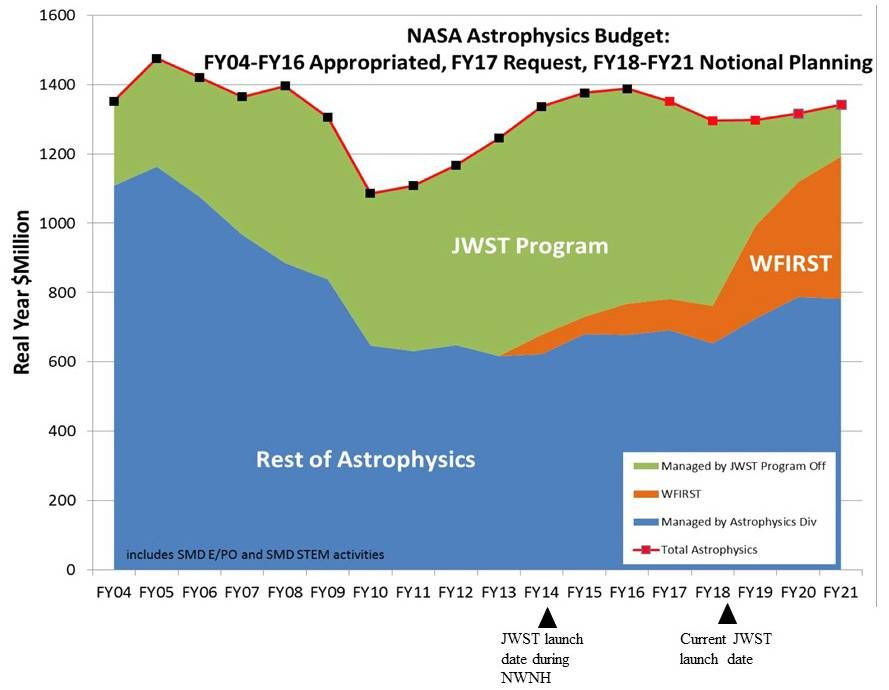
NASA-Astrophysics Division Program (APD) budget from FY2004 to FY2021. Squares on the upper boundary mark the sum of the James Webb Space Telescope (JWST) budget and the NASA-APD budget, with values for FY2017 and FY2018-FY2021 representing the administration request and the notional out-year planning budget, respectively.
Credit: Figure adapted from a presentation by P. Hertz, NASA/Data from NASA
JWST – driving factor
These WFIRST changes, while scientifically compelling, could result in further increased costs and further delays for the mission, the committee said.
A committee recommendation is that prior to final confirmation of the WFIRST changes, NASA conduct an independent review of the project to ensure it does not crowd out investment in the rest of NASA’s astrophysics portfolio and, if necessary, de-scope the mission.
The report also finds that the driving factor in the delay or non-pursuit of some new NASA initiatives, including WFIRST, was the schedule change and increased cost associated with the James Webb Space Telescope (JWST) – a successor to the Hubble Space Telescope that is set to launch in 2018.
Report PDF
The study was sponsored by NASA, the National Science Foundation, and the U.S. Department of Energy.
To focus in on the report and read a free PDF of its conclusions and recommendations, go to:
http://www.nap.edu/catalog/23560/new-worlds-new-horizons-a-midterm-assessment

China’s Shenzhou-11 piloted spacecraft in testing.
Credit: CCTV/framegrab via GBTimes.
Preparations are quickening in China for the country’s next piloted space mission.
Chinese media outlets have noted the arrival of the Shenzhou-11 spacecraft at the Jiuquan Satellite Launch Center in northwest China on Saturday, just two months before it carries two astronauts into space for a 30-day mission.
According to China’s Manned Space Engineering (CMSE) office, general assembly and testing of the piloted craft will begin at the center ahead of the launch scheduled for mid-October.
Space lab first
Shenzhou-11 will transport personnel and supplies to China’s second orbiting space lab — Tiangong-2 — which is to be launched in mid-September. Tiangong-2 was delivered to the center in early July and the carrier rockets arrived last week.

China’s Tiangong-2 space lab undergoing checkout for September liftoff.
Credit: CCTV via China Spaceflight
Still unnamed, the Chinese astronauts selected for the mission are both male and have been undergoing intense training, according to CMSE.
Technological renovations
According to Li Bing, chief engineer, testing and launching station at the Jiuquan Satellite Launch Center:
“This is the first time for us to have two manned spacecraft and two carrier rockets at the launching site at the same time. We have to carry out the maintenance work simultaneously. Up till now our work has been carried out smoothly to ensure the successful accomplishment of the two missions.”
According to Li, up to 22 full-length technological renovations have been done during the past three years “in order to forge a more favorable environment for launching manned spaceships in future.”
More mature system
Zheng Wei, assistant chief designer of spacecraft system, China Aerospace Science and Technology Corporation, points out:
“Shenzhou-11 has inherited all the tried and true features of its predecessors of Shenzhou-8, -9 and -10. It is therefore of confirmed stability, higher reliability and more maturity.”
Zheng adds that if there are fewer people on board the Shenzhou, “we can transport more cargo in the stead for to-go and to-come-back trips with materials for space experimentation.”

China’s Shenzhou-11 piloted spacecraft being readied for launch mid-October.
Credit: CCTV via China Spaceflight
At present, Jiuquan is China’s one and only launch site for human space flights. The center has recently undergone a three-year thorough revamp which has transformed it into a better facility for launching manned spacecrafts, according to Chinese space officials.
Video resources
A set of CCTV-Plus videos is available showing the Shenzhou-11 arrival at Jiuquan; launch site preparations; and features of the soon-to-launch piloted spacecraft at:

Curiosity Mastcam Left image taken on Sol 1428, August 12, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover is now in Sol 1429 of its operations, recently completing a drive of over 148 feet (45 meters). The robot has wheeled closer to the Murray Buttes, reports Ken Herkenhoff at the USGS Astrogeology Science Center in Flagstaff, Arizona.
The weekend plan calls for Chemistry & Camera (ChemCam) target shooting.
“The primary constraint on planning,” Herkenhoff adds, “ended up being power…we tried to fit more into the plan than the rover’s batteries could support! But we were still able to include a lot of good activities into the plan, starting with a dust devil search, dust opacity measurements, and Mastcam stereo mosaics of the Murray Buttes on Sol 1429.”
Curiosity Navcam Left B image taken on Sol 1428, August 12, 2016.
Credit: NASA/JPL-Caltech
ChemCam targets
Curiosity’s ChemCam is to acquire Laser Induced Breakdown Spectrometer (LIBS) data on bedrock targets “Matala,” “Cazombo,” and “Ondjiva” before the rover’s Right Mastcam takes a 7×3 mosaic that includes the ChemCam targets.
Curiosity Navcam Left B image taken on Sol 1428, August 12, 2016.
Credit: NASA/JPL-Caltech
Overnight and into the early morning hours of Sol 1430, the script calls for the Sample Analysis at Mars (SAM) Instrument Suite to perform the first part of an experiment on the Mojave drill sample that has been stored in the instrument for several months, Herkenhoff explains. The second part of the SAM experiment is planned for the next night, completing early on Sol 1431.
Curiosity Navcam Left B image taken on Sol 1427, August 11, 2016.
Credit: NASA/JPL-Caltech
Drive ahead
A planned drive of the rover is slated for Sol 1431, followed by acquisition of the data needed to plan another drive on Monday.
“So, even though we had to remove some activities during planning, the rover will be very busy this weekend,” Herkenhoff concludes.
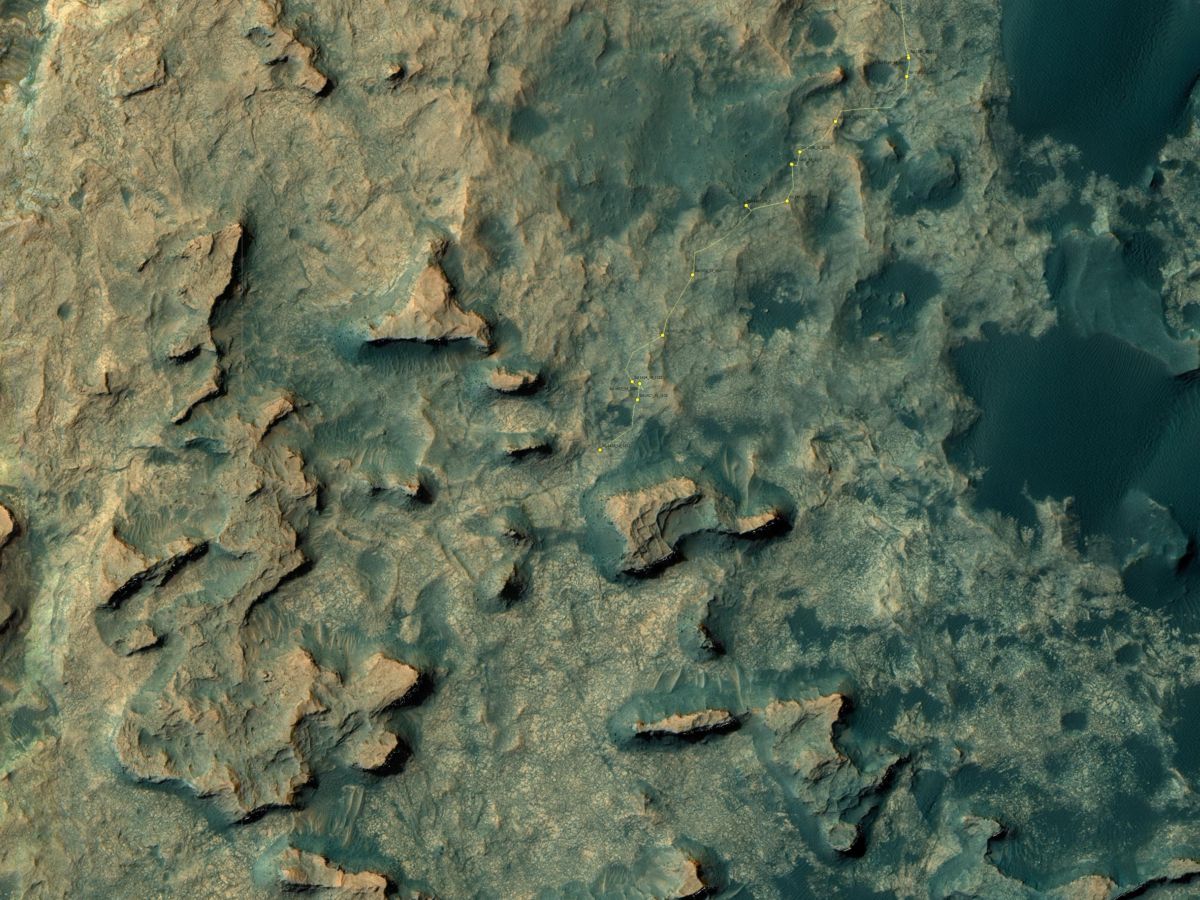
Click on this map to enlarge the route driven by NASA’s Mars rover Curiosity through the 1428 Martian day, or sol, of the rover’s mission on Mars (August, 12, 2016).
Numbering of the dots along the line indicate the sol number of each drive.
North is up. From Sol 1427 to Sol 1428, Curiosity had driven a straight line distance of about 136.95 feet (41.74 meters).
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 8.47 miles (13.63 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Image Credit: NASA/JPL-Caltech/Univ. of Arizona
In an earlier communiqué from Lauren Edgar, a research geologist at the USGS Astrogeology Science Center, based on recent Mastcam imagery, “the view ahead should be quite scenic as we drive through the Murray Buttes!”

Blue Origin’s New Shepard booster takes flight.
Credit: Blue Origin
With multiple flights of its New Shepard system under its belt, Blue Origin is appraising the research market for scientific and technological experiments that can be lofted to the edge of space.

Trajectory profile.
Credit: Blue Origin
In reaching over 62 miles (100 kilometers) above Earth, roughly three minutes of microgravity environment is available for a range of experiments. The New Shepard system has flown experiments on past test flights. It can support physics investigations, gravitational biology research, atmospheric and space science studies, as well support technology demonstrations.
Go to my new story on Space.com for more information on this “up and going” rocket company:
Blue Origin’s Sweet Spot: An Untapped Suborbital Market for Private Spaceflight
By Leonard David, Space.com’s Space Insider Columnist
August 12, 2016 07:20am ET
http://www.space.com/33705-blue-origin-suborbital-private-spaceflight-market.html

Curiosity Mastcam Right image taken on Sol 1425, August 9, 2016.
Credit: NASA/JPL-Caltech/MSSS
Now at the start of Sol 1427, NASA’s Curiosity Mars rover has been busily working at the Marimba drill hole.
A second attempt to drill into Marimba went well, however, the new drill sample was not transferred to Curiosity’s Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA) device.
Gentle vibration
The problem was due to a recurrence of the electrical short in the percussion mechanism. Therefore, the sample was not delivered to the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) as planned, explains Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
“So we tried again on Sol 1425, this time without percussion…using only more gentle vibration,” Herkenhoff adds.
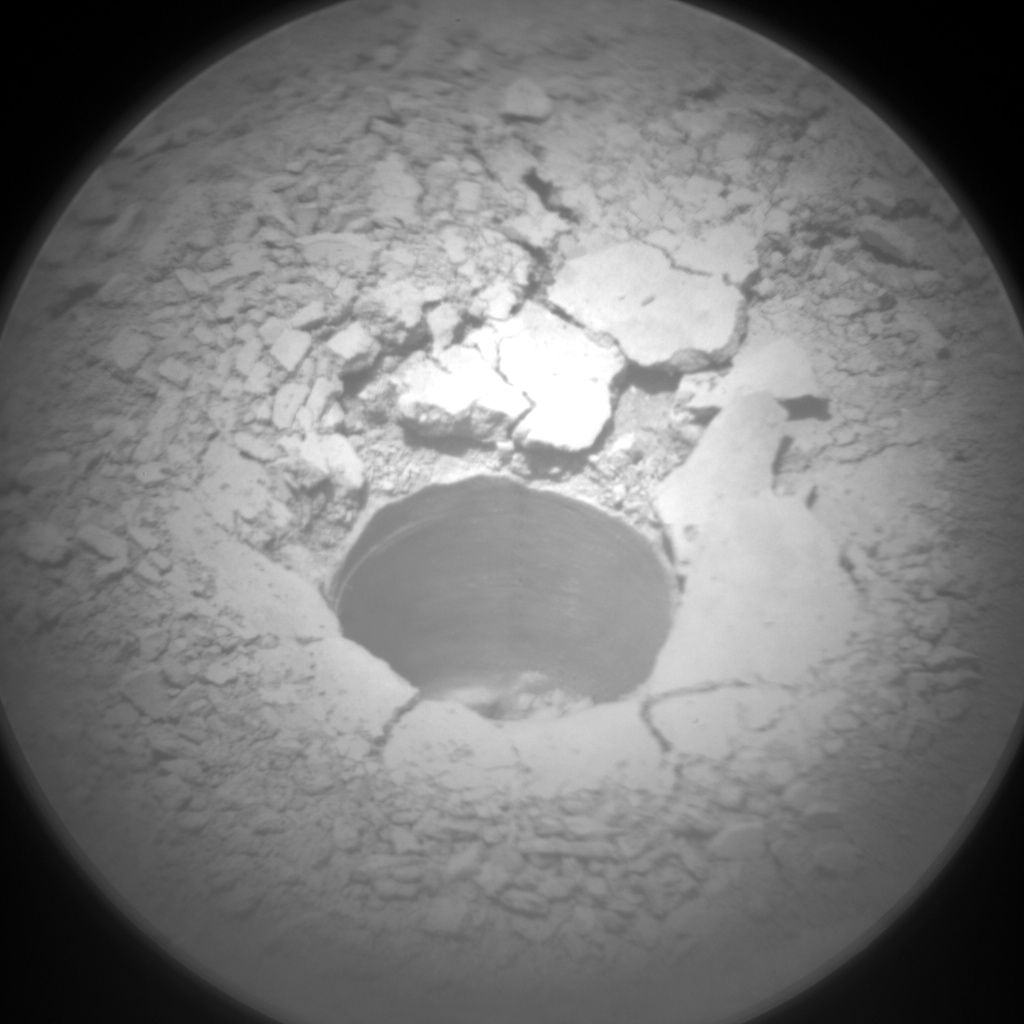
Curiosity ChemCam Remote Micro-Imager photo taken on Sol 1425, August 9, 2016.
Credit: NASA/JPL-Caltech/LANL
Back on track
The rover’s Mars Hand Lens Imager (MAHLI) and the Alpha Particle X-Ray Spectrometer (APXS) were used to observe the drill hole and cuttings.
Planned activities called for dumping the pre-sieved drill sample. “After we dump the sample, we’ll acquire Mastcam, Navcam and MAHLI images to document the pile,” adds research geologist Lauren Edgar at the USGS Astrogeology Science Center.
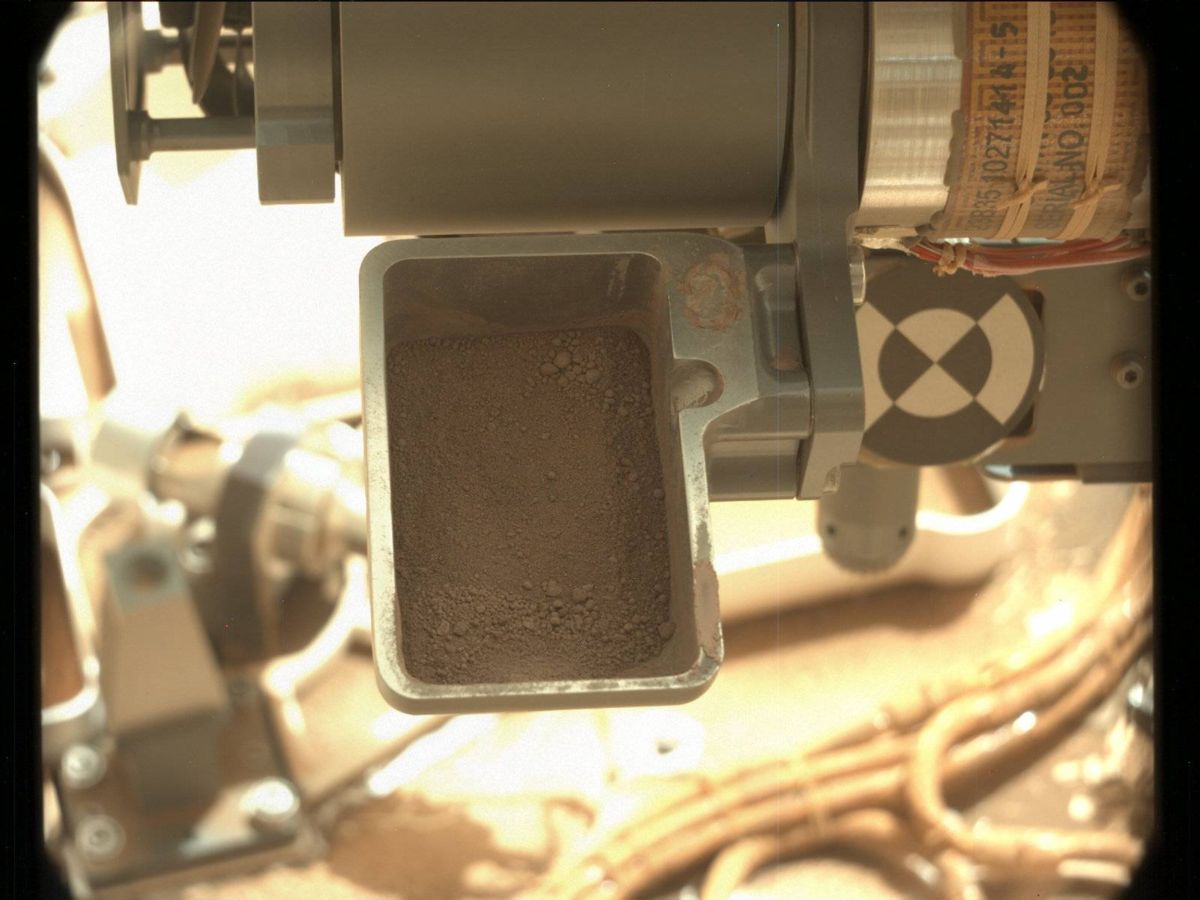
Curiosity Mastcam Left image taken on Sol 1425, August 9, 2016.
Credit: NASA/JPL-Caltech/MSSS
“This drill site has been challenging,” Edgar notes, “but we’re back on track and ready to drive away soon!”

Curiosity Mastcam Right image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech/MSSS
Now in Sol 1422 operations on Mars, NASA’s Curiosity rover has carried out drill activities at a target site dubbed “Marimba” – but the result is a bit of a mystery.
Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona reports:
“On Sol 1420 we planned a full drill hole on the target “Marimba” to characterize the composition of the Murray mudstone in this location. However, we came in early this morning to find that the drill hole didn’t penetrate very far into this rock target.”
Drill hole different
Using its Mars Hand Lens Imager, clearly the rover-produced drill hole is different, Edgar says. “We’re trying to evaluate why this drill hole is different, and what prevented the drill from completing as planned. The rover is healthy and all other activities completed successfully, so this might just be a harder rock target than we’ve seen before.”

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI) on August 4, 2016, Sol 1420. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
Rover team members are evaluating the drill activity and options for moving forward.
Chemistry with depth
A decision has been made to take advantage of the shallow drill hole “as a way to assess variations in chemistry with depth,” Edgar adds.
So the plan calls for rover Mastcam multispectral and Chemistry & Camera (ChemCam) passive observations of the drill tailings, as well as a ChemCam LIBS (laser-induced breakdown spectroscopy) observation across the drill hole.
Additionally, on the schedule is ChemCam observation of “Cabinda” to assess an alternative drill site, as well as the target “Epukiro” to investigate an interesting vein.
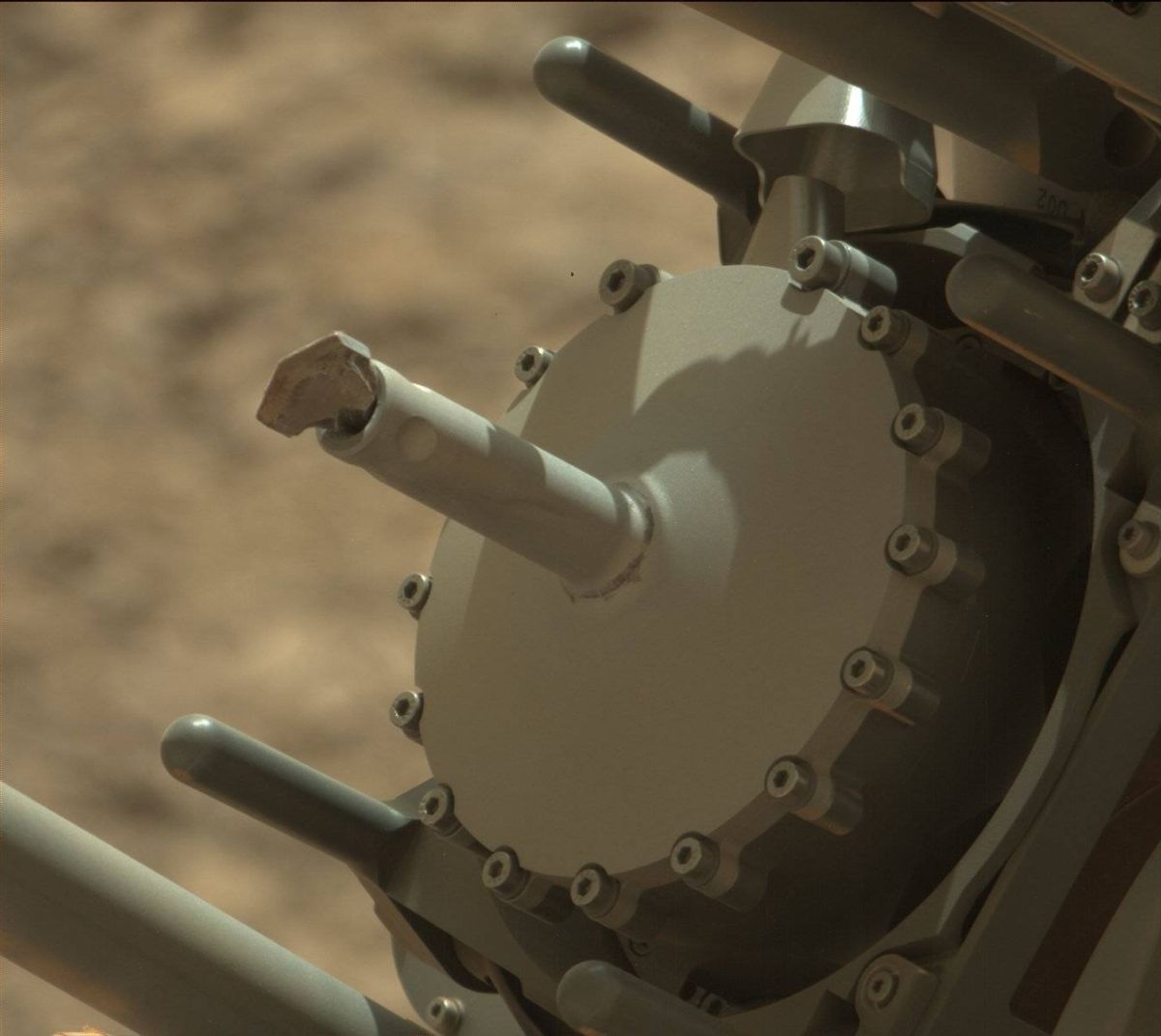
Close-up inspection of rover drilling hardware. Curiosity Mastcam Right image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech/MSSS
Dump piles
“We’ll also use Mastcam and ChemCam to assess the post-sieve dump piles from the previous drill target “Oudam,” which we dumped on a nearby rock slab,” Edgar says.
Then Curiosity will use Mastcam and Navcam to monitor the atmosphere and search for dust devils.
Also on tap is acquisition of a 360-degree Mastcam mosaic to provide geologic context for this drill site, Edgar reports.

Curiosity Mastcam Left image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover on Mars is wrapping up duties and soon departing Sol 1421 work on the Red Planet.
Ken Herkenhoff from the USGS Astrogeology Science Center in Flagstaff, Arizona reports that Sol 1419 activities were completed successfully, including cleaning the remaining Oudam sample out of Curiosity’s Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA) device.
The focus of Sol 1420 plans was the drilling into the Marimba bedrock target.

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager, located on the turret at the end of the rover’s robotic arm, on August 4, 2016, Sol 1420.
Credit: NASA/JPL-Caltech/MSSS
Prior to this activity, the plan calls for the Mars Hand Lens Imager (MAHLI) to image the “noseprint” of the Alpha Particle X-Ray Spectrometer (APXS) contact sensor in the Oudam dump pile and the drill target from various distances, Herkenhoff adds.
After the drilling has completed, the drill bit and the new drill hole was imaged by many of the MSL cameras.

Curiosity Mastcam Right image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech/MSSS
Changes in sand deposits
“And once again, we were able to fit some additional Mastcam observations into the plan,” Herkenhoff explains, such as measurements of dust in the atmosphere, a stereo mosaic extending coverage of the arm workspace, images of targets “Cota 1” and “Cota 2” to serve as a baseline for detecting changes in sand deposits this weekend, and two stereo pairs to improve coverage of one of the Murray Buttes.
Curiosity Navcam Left B image taken on Sol 1421 August 5, 2016.
Credit: NASA/JPL-Caltech
As always, dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Curiosity Front Hazcam Left B image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech

Frame grab Image of Tiangong-2 via CCTV/GB Times
China is dispatching two of its Long March II F or CZ-2F carrier rockets to the country’s Jiuquan launch site. They are being readied to support launch of the Tiangong-2 space laboratory and the Shenzhou-11 piloted spacecraft.
According to a report on CCTV-Plus news, this is the first time that two CZ-2F rockets have been transferred to the launch center at the same time.
One of the carrier rockets is set to launch in the third quarter of this year (next month) the Tiangong-2 space laboratory. The other booster is to lift off later with two astronauts to dock with the space laboratory.
Final battle
Tiangong-2 arrived at the Jiuquan launch complex early last month and is going through tests prior to its launch.
The Shenzhou-11 piloted craft will carry out a variety of scientific researches and applications, as well as appraise some key techniques and checking on the possibility of long-term human residence in space.
“Let’s put it this way…it’s the start of the final battle of the mission of Tiangong-2 space laboratory. We are going to complete the en-masse lifting and thorough checking of the rocket, upon its arrival at the launch center,” says Jing Muchun, chief commander of CZ-2F rockets on CCTV-Plus.
“The rockets have to be sent into space without a hitch hidden or otherwise. This is our ultimate goal,” says Jing.
If all goes according to plan, the Tianzhou-1 cargo resupply vessel will be hurled into Earth orbit next year to support Tiangong-2 operations. The supply ship will be sent spaceward atop a Long March 7 rocket from the Wenchang launch center in the first half of 2017.
A short CCTV-Plus video is available here showing launch preparations and graphics depicting the Tiangong-2 mission:
http://pv.news.cctvplus.com/2016/0803/8028732_Preview_1470223827673.mp4
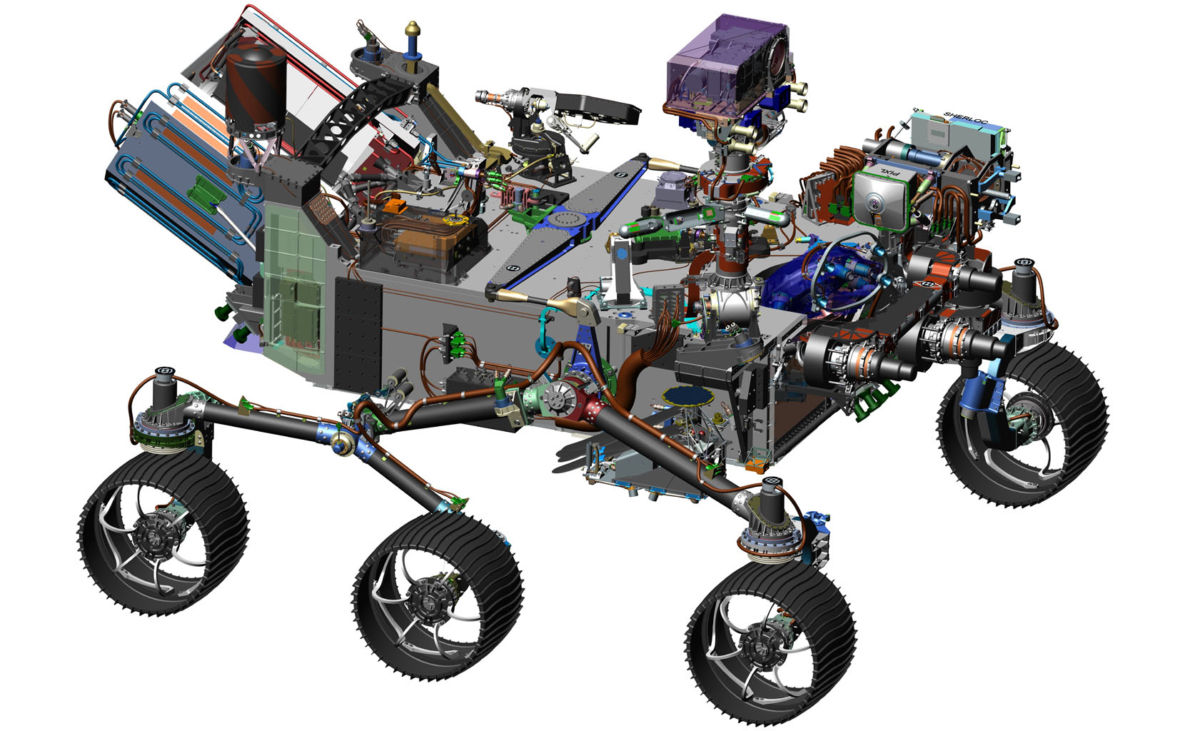
The listening robot. New computer generated image of Mars 2020 rover.
Credit: NASA/JPL/Caltech
NASA’s 2020 Mars rover is to carry special cameras and microphones to capture stunning views and sounds of its barnstorming entry, descent and landing on the Red Planet.
The hardware will not only give the public a unique ringside seat to exploration. Such equipment can also help engineers design future robotic and human landing systems for Mars.
If all goes to plan, the Mars 2020 mission will be the most documented landing in history.

Screaming in! Mars 2020 rover’s entry, descent and landing – microphones and cameras will capture the sounds and sights.
Credit: NASA/JPL-Caltech
For more information on how the Mars robot will be “all ears and eyes,” go to my new Space.com story:
Mic’d Up on Mars! 2020 Rover Will Capture Sounds of Red Planet
By Leonard David, Space.com’s Space Insider Columnist
August 4, 2016 07:00am ET
http://www.space.com/33637-nasa-mars-2020-rover-microphone.html

