Archive for March, 2016

Credit: GAO
The U.S. government’s General Accountability Office (GAO) has released an informative and detailed look at 18 major NASA projects.
This report is a GAO annual snapshot of how well NASA is planning and executing its major acquisition projects. In March 2015, GAO found that projects continued a general positive trend of limiting cost and schedule growth, maturing technologies, and stabilizing designs, “but that NASA faced several challenges that could affect its ability to effectively manage its portfolio.”

Orion spacecraft in development.
Credit: NASAFour projects were assessed for the first time this year: The Asteroid Robotic Redirect Mission (ARRM), Europa, Exploration Ground Systems (EGS), and Ionospheric Connection (ICON).
Commercial crew
Four projects were assessed for the first time this year: The Asteroid Robotic Redirect Mission (ARRM), Europa, Exploration Ground Systems (EGS), and Ionospheric Connection (ICON).
The just-released GAO report also assessed NASA’s Commercial Crew Program.

NASA’s Commercial Crew Program reviewed by GAO.
Credits: ULA (Left)/SpaceX (Right)
You’ll find some interesting perspectives on other programs as well, such as the James Webb Space Telescope, Mars 2020, the Space Launch System, and the Orion Multi-Purpose Crew Vehicle.
Regarding the outcome of the report, Cristina Chaplain, a director in GAO’s Acquisition and Sourcing Management team explains:
“The bottom line is that this is good news for NASA. They’ve been taking very good steps to lower acquisition risks.
But they really need to sustain this in the largest projects. They’re going to be very tested in the next few years. There’s going to be a new administration. And all these projects are going to be hitting their most difficult phases of development. So these practices need to be there when NASA is tested the most.”
For your own accountability scoring regarding NASA and its on-going set of programs, go to:
NASA: Assessments of Major Projects (GAO-16-309SP, March 30).
Report: http://www.gao.gov/products/GAO-16-309SP
Highlights: http://www.gao.gov/assets/680/676178.pdf
Credit: SpaceWorks Enterprises, Inc. (SEI)
Small is beautiful…and in space, nano along with micro is big news.
SpaceWorks Enterprises, Inc. (SEI) in Atlanta, Georgia has issued its annual assessment of markets for nano/microsatellites. The appraisal spotlights this sector and notes its growth in recent years, led by large constellation plans from the commercial industry.
SEI projections indicate more than 400 nano/microsatellites will need launches annually in the year 2022 and beyond.
Limited launch opportunities in 2015 meant that there is a growing backlog of small satellites looking to launch in 2016 and beyond.
News for the masses
The group is currently tracking 780 future (2016 – 2018) nano/microsatellites with masses between 1 kilogram and 50 kilograms in various stages of planning or development.
SpaceWorks Enterprises, Inc. (SEI)
Historical launches and publicly announced plans for future launches, as well as estimated market growth, explains SEI serve as a basis for projection of the quantity of nano/microsatellites that will launch between 2016 and 2022.
This report bounds the upper range of interest in microsatellites at 50 kg given the relative large amount of satellite development activity in the 1-50 kg range by comparison to the 50-100 kg range.
Study messages
A few takeaway messages from the study:
- The commercial sector will increase its proportional representation over the next three years, to the extent that it will soon account for the majority of spacecraft launched in the 1 – 50 kg class.
- More than 70% of future nano/microsatellites will be used for Earth observation and remote sensing purposes (compared to 37% from 2009 to 2015).
- As key companies move toward operations, a smaller proportion of technology development/demonstration nano/microsatellites will be built in the next few years.
- While still widely used by academia, 1 – 3 kg CubeSats will comprise less than 30% of the market in the future (compared to 71% from 2009 to 2013).
- Over 60% of future nanosatellites (1 – 10 kg) will be in the increasingly popular 4 – 6 kg mass class (compared to only 23% from 2009 to 2013).
- Low cost piggy-back opportunities on medium and heavy-lift launch vehicles have attracted small satellite payloads; Many small dedicated launchers under development could change this trend.

SpaceWorks Enterprises, Inc. (SEI)
Good space citizens
Given this projected growth of small satellites, what’s the worry regarding the potential for adding to space debris woes, and is there need for more regulation of the nano/microsatellite community?
Bill Doncaster, SEI senior systems engineer who helped develop the 2016 Nano/Microsatellite Market Forecast, told Inside Outer Space:
“At SpaceWorks we’re very bullish on the potential for sustained growth in this segment,” Doncaster said. He explains that SEI views the small satellite operators and their launch providers as being proactive at managing the orbital life for these programs.
“A majority of small satellites are currently going to low earth orbits, deploying off the International Space Station, for example, where their orbit decays within a year, maybe three at most, and so the number of active objects tracks with launches,” Doncaster explained. “Generally, as long as the operators continue to be good space citizens we don’t see the need for additional regulations.”
SpaceWorks Enterprises, Inc. specializes in independent technical concept development, economic analysis, market research, technology impact assessment, and systems analyses for future space systems and projects.
The study summary is available in presentation form as a free download on the website: www.spaceworksforecast.com

Curiosity’s Mastcam Left instrument took this image on Sol 1294, March 27, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now in Sol 1296 after making a drive of 55 feet (17 meters) on Sol 1294.
Images relayed from the robot show delicate features that have apparently been formed by windblown sand abrasion, notes Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Bedrock targets
On its current sol, Curiosity faces a path of more rough terrain, but it looks like the rover will be able to drive approximately 165 feet (50 meters), Herkenhoff reports.
Before driving, the rover’s Chemistry and Camera (ChemCam) instrument and its Mastcam were slated to observe bedrock targets “Bloedkoppie,” “Blaubeker” and “Blaubock,” and Mastcam would acquire mosaics of ridges and outcrops of the Stimson sandstone.

Curiosity’s Mastcam Left instrument took this image on Sol 1294, March 27, 2016.
Look for dust devils
On tap during Sol 1297, the rover’s Mastcam is scheduled to measure the amount of dust in the atmosphere by imaging the Sun, and Navcam will search for dust devils.
Early on Sol 1298, the plan calls for the robot’s Left Mastcam to acquire another mosaic of the Stimson sandstone on the Naukluft Plateau, Herkenhoff explains.

Curiosity’s Traverse Map Through Sol 1292.
This map shows the route driven by NASA’s Mars rover Curiosity through the 1292 Martian day, or sol, of the rover’s mission on Mars (March 25, 2016).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (roughly 0.62 mile). From Sol 1290 to Sol 1292, Curiosity had driven a straight line distance of about 16.61 feet (5.06 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Artist’s view of the Bigelow Expandable Activity Module (BEAM) attached to the International Space Station.
Credit: Bigelow Aerospace
The long awaited debut of the Bigelow Expandable Activity Module (BEAM) is near at hand.
BEAM is a product of the private group, Bigelow Aerospace of North Las Vegas, Nevada. The technology was developed under a NASA contract in an effort to test and validate expandable habitat technology.

Credit: Bigelow Aerospace
Beyond the BEAM is the prospect of seeing larger expandable habitats utilized in Earth orbit and at deep space destinations.
Station resupply
BEAM is slated for launch in the unpressurized aft trunk compartment of the SpaceX Dragon spacecraft on the eighth resupply mission (CRS-8) to the International Space Station (ISS). Depending on a SpaceX static fire test of its Falcon 9 booster, BEAM could be rocketed to the ISS as early as April 8th.

Inside look at BEAM.
Credit: Bigelow Aerospace
CRS-8 will be the first CRS mission to the ISS since the ill-fated CRS-7.
Back on June 28, 2015, the Falcon 9 lifted off carrying Dragon and an International Docking Adapter for the ISS, but an overpressure event caused the rocket to disintegrate moments before stage separation.
Pathfinder technology
BEAM is billed as a vital pathfinder for validating the benefits of expandable habitats, for use in low Earth orbit, cislunar space, as well as for Moon and Mars surface missions. The ISS-attached BEAM will see a two-year demonstration period.
At launch of the Falcon 9, the BEAM will be in a packed configuration in the trunk of the Dragon spacecraft. Once in Earth orbit, the Canada Arm will remove BEAM from the Dragon spacecraft and berth the module to the Tranquility node (Node 3) of the ISS. Astronauts will initiate an automated deployment sequence, allowing the BEAM to passively expand to its full volume.
The BEAM will be monitored for pressure, temperature, radiation protection, and micro-meteoroid/debris impact detection. Astronauts will periodically enter the BEAM to record data, and perform inspections of the module.

Dual B330s in lunar orbit.
Credit: Bigelow Aerospace
Larger habitat
BEAM is a precursor to the Bigelow Aerospace B330, a much larger expandable space habitat privately manufactured by Bigelow Aerospace. The design was evolved from NASA’s TransHab habitat concept.
As the name indicates, the B330 will provide 330 cubic meters (12,000 cubic feet) of internal volume and each habitat can support a crew of up to six.
The craft can support zero-gravity research including scientific missions and manufacturing processes. Beyond its industrial and scientific purposes, however, it has potential as a destination for space tourism and a craft for missions destined for the Moon and Mars.
NextSTEP
Under a NASA Next Space Technologies for Exploration Partnerships (“NextSTEP”) contract, Bigelow Aerospace will demonstrate how B330 habitats can be used to support safe, affordable, and robust human spaceflight missions to the Moon, Mars, and beyond.

Bigelow B330 module, an inside look.
Credit: Bigelow Aerospace
“We’re eager to work with NASA to show how B330s can support historic human spaceflight missions to the Moon and other destinations in cislunar space while still staying within the bounds of the Agency’s existing budget,” said Bigelow Aerospace’s President and founder, Robert T. Bigelow.
“NASA originally conceived of expandable habitats decades ago to perform beyond LEO missions, and we at Bigelow Aerospace look forward to finally bringing that vision to fruition,” Bigelow said in a company statement.

Image from Curiosity’s Navcam Left B camera on Sol 1292, March 25, 2016.
Image Credit: NASA/JPL-Caltech
NASA’s Mars Curiosity rover is looking at “gnarly” terrain ahead!
Now in Sol 1292, Curiosity made a drive of over 75 feet (23 meters) on Sol 1290.
According to Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, the plan is to keep driving across the Naukluft Plateau on the Red Planet.
“The terrain looks pretty rough, so we’re plotting our course carefully,” Edgar adds.

Curiosity Front Hazcam Left B image taken on Sol 1292, March 25, 2016.
Image Credit: NASA/JPL-Caltech
Science activities in a recent plan include Chemistry & Camera (ChemCam) and Mastcam observations to assess the local bedrock, and a Mastcam mosaic to document the sedimentary structures exposed in that area.
The plan also includes some Mastcam observations to assess atmospheric opacity.
“After the drive, we’ll take our standard post-drive imaging to prepare for future targeting and the possibility of contact science in the weekend plan,” Edgar says.

Curiosity Mastcam Right image taken on Sol 1290, March 23, 2016.
Image Credit: NASA/JPL-Caltech/MSSS
As always, planned rover activities are subject to change.

Curiosity’s Traverse Map Through Sol 1290
This map shows the route driven by NASA’s Mars rover Curiosity through the 1290 Martian day, or sol, of the rover’s mission on Mars (March, 24, 2016).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile). From Sol 1289 to Sol 1290, Curiosity had driven a straight line distance of about 73.34 feet (22.35 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Image Credit: NASA/JPL-Caltech/Univ. of Arizona
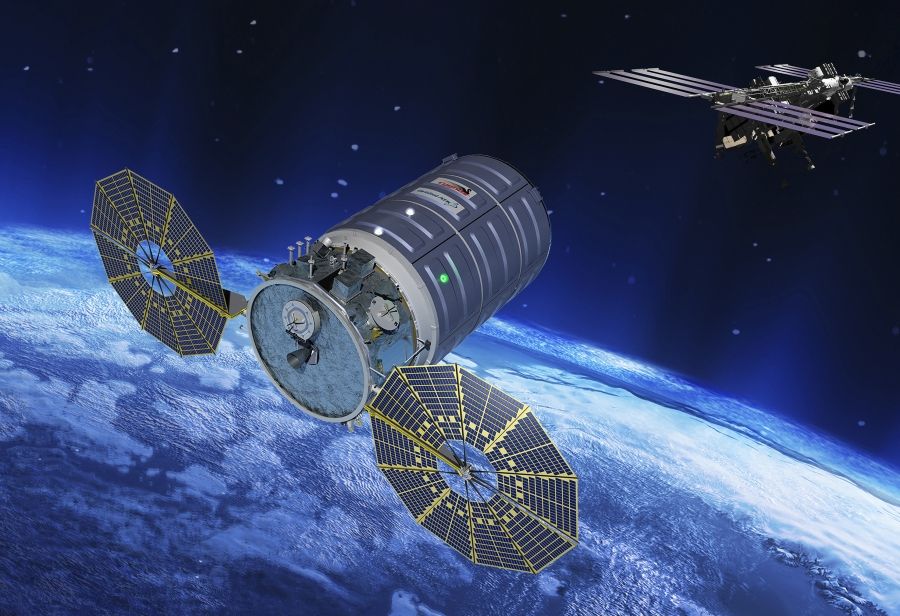
Cygnus en route to International Space Station.
Credit: Thales Alenia Space
Last night’s successful launch of the Cygnus supply ship to the International Space Station is loaded with equipment – including an experiment to observe and record incoming meteors and reentering objects from Earth orbit.
Called the Meteor experiment, once installed onboard the ISS the plan is for the gear to operate for 2 years, balanced against other science priorities. Meteor will be installed in the station’s Window Observational Research Facility or WORF for short.
This is the second run of Meteor to reach the ISS. The original Meteor camera was a payload of the Cygnus CRS Orb-3 mission of Orbital ATK which suffered a catastrophic anomaly moments after launch on October 26, 2014.

Photo of Meteor installed in the Window Observational Research Facility (WORF) Simulator at NASA’s Johnson Space Center. This is how it should look after installation on the International Space Station.
Credit: Southwest Research Institute/Chiba Institute of Technology
Secondary targets
Project Meteor’s goal is to make the first spaceborne observations of the chemical composition of meteors entering Earth’s atmosphere. The equipment is slated to make observations during the night portion of each ISS orbit, and plans to operate during periods of predicated and well known meteor showers.

Meteor observation system — the Chitech Observatory of METor on iSS (COMET SS).
Credit: COMET SS Consortium
The camera is scheduled to record all 12 known major showers. Secondary targets include minor meteor showers and periods with little or no identified regular activity. Observation of de-orbiting spacecraft and other targets also will be made.
Video and images
Viewing from the ISS is not affected by weather or interference from Earth’s atmosphere. The Meteor project intends to provide continuous monitoring of meteor interaction with the Earth’s atmosphere without limitations of the ozone absorption.
Once up and operating, the Meteor investigation is designed to take high-resolution video and images of the atmosphere and uses a software program to search for bright spots, which can later be analyzed on the ground.

Photo of the Window Observational Research Facility (WORF) rack in the Destiny Module of the ISS.
Credit: NASA
On its own
The Meteor system will operate mostly on its own, explains Michael Fortenberry, Principal Investigator for Meteor at Southwest Research Institute. He explains that the ISS crew will only need to adjust the lens focus and change out hard drives that store high-resolution video collected by the camera.
A software program will identify and separate video clips that likely include meteors, and those can be further analyzed later on the ground. Scientists can use these images to glean information such as the size of a particle of meteoric dust based on its flight path and light curve.
Out the window

Here is what a meteor shower looks like from orbit. During the peak of the 1997 Leonid Meteor Shower, the DoD’s Midcourse Space
Experiment (MSX) satellite imaged from above 29 meteors over a 48 minute period entering the Earth’s atmosphere.
Credit: P. Jenniskens (NASA/Ames, SETI Inst.) et al., APL, UVISI, MSX, BMDO
The ISS Window Observational Research Facility (WORF) provides a stable platform for hand-held photography and other research activities. It is the highest optical-quality window ever installed on a human space vehicle. The Window enables the use of high-resolution cameras from inside the station rather than outside, where instruments are subject to the vacuum and extreme temperatures of space.
Partners in the Meteor investigation include the Center for the Advancement of Science in Space (CASIS), Southwest Research Institute (SwRI), and Japan’s Chiba Institute of Technology/Planetary Exploration Research Center (CIT/PERC. The Meteor camera has been developed by CIT/PERC. NASA and the NL (National Laboratory) are sponsoring the Meteor project.

China’s 60-ton medium-size space station is depicted in this artwork.
Credit: CNSA
State-run news agencies in China report that the country’s first space lab — Tiangong-1—has ended data service. That function was terminated by China’s space engineering office.
The spacecraft has been in an “operational orbit” of 1,630 days.
Tiangong-1 was launched in September 2011 with a design life of two years.
The space lab was busy during its extended flight, carrying out space technology experiments and also performing Earth remote sensing activities.

Artist’s concept of the Tiangong-1 in Earth orbit.
Credit: CMSA
Tiangong-1 was used during Shenzhou-8 (unpiloted), Shenzhou-9 (piloted) and Shenzhou-10 (piloted) spacecraft missions. The lab had completed its main missions following the piloted Shenzhou-10’s return to Earth in June 2013.
Next space lab
Earlier this year, Chinese space officials announced that Tiangong-2 is being readied for launch in the third quarter of this year. This space lab is to latch up with the Tianzhou-1- an automated cargo ship — in the first half of 2017.
This maiden voyage of the cargo supply vehicle is to be boosted by the still-to-be-flown Long March-7 rocket. That booster is to fly this year, lifting off from China’s new Wenchang satellite launch center in south China’s Hainan Province.
China also has on schedule the launch of a two-person Shenzhou-11 spacecraft in the fourth quarter of this year to dock with Tiangong-2.
According to the Xinhua news agency, the Shenzhou-11 crew is now in training.
Meanwhile, the Tiangong-2, Shenzhou-11, the two Long March-2F carrier rockets to be used to lift those vehicles into space, as well as the Long March-7 rocket, and the Tianzhou-1 supply ship “are either being assembled or undergoing assembly examination.”
Medium-sized space station
These space missions are designed to verify key technologies and techniques for China to fabricate a 60-ton, multi-modular “medium-sized” space station around 2020.

China’s new spaceport on Hainan Island.
Credit: CMSE
The core module of China’s space station is to be lofted in 2018 to test related technologies and to research engineering issues. The station is to be fully operational in about 2022, say government sources.
China’s Long March 5 booster is tied to the country’s space station program, now on tap for its premier blastoff from the Wenchang Satellite Launch Center later this year.

Curiosity’s Multi-Mission Radioisotope Thermoelectric Generator (RTG) is shown in this recent Navcam Left B image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech
A short in Curiosity’s Multi-Mission Radioisotope Thermoelectric Generator (RTG) has curtailed a drive of the Mars rover of roughly 50 feet (15 meters). The problem with the rover’s RTG has happened before on several occasions, reports Lauren Edgar a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
“Because the fault is understood, we were able to proceed with the weekend plan from our current location,” Edgar explains.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Internal short
Back in early 2013, it was reported that Curiosity’s RTG power source experienced an internal short.
“Due to resiliency in design, this short does not affect operation of the power source or the rover. Similar generators on other spacecraft, including NASA’s Cassini at Saturn, have experienced shorts with no loss of capability. Testing of another Multi-Mission Radioisotope Thermoelectric Generator over many years found no loss of capability in the presence of these types of internal shorts,” explained a JPL rover update on January 25, 2013.
The RTG issue was resolved, and Curiosity continued onward.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Local bedrock
The Mars machinery is now in Sol 1287.
The first sol of the weekend plan was set to be devoted to targeted remote sensing.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
“We’ll start with some environmental monitoring observations to assess atmospheric opacity and composition,” Edgar adds. On tap was also acquisition of Chemistry & Camera (ChemCam) and Mastcam observations on the targets “Sesriem Canyon,” “Omaheke,” and “Varianto” to assess variations in composition and sedimentary structures in the local bedrock.
Also slated was taking a large Mastcam mosaic of Mt. Sharp, “to take advantage of the low atmospheric opacity right now…which means that the conditions are great for imaging,” Edgar adds.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Drive rescheduled
A second weekend sol is focused on contact science. The rover’s Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) are to investigate two selected targets.
“The first target exposes some nice bedding in the Stimson formation, and the second includes some interesting bright material for comparison,” Edgar says. “Then on the third sol, we’ll again try to drive towards the ridge to the northwest and acquire post-drive imaging for targeting.”

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Curiosity Navcam Right B image taken on Sol 1284, March 17, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is still working its way across the Naukluft Plateau and is now into Sol 1285.
On Sol 1284 Curiosity drove roughly 88 feet (27 meters, which brings the rover’s total traverse distance to roughly 8 miles (12,549 meters) reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
In the morning, Curiosity was slated to use its Mastcam and Chemistry & Camera (ChemCam) on targets named “Mulden” and “Koigab” to characterize the bedrock that the robot has been driving over. A Mastcam mosaic was on the plan to investigate the local stratigraphy.
“Then Curiosity will continue driving towards the northwest, and will take post-drive imaging to prepare for contact science over the weekend,” Edgar adds.

Curiosity Rover’s Location for Sol 1284
This map shows the route driven by NASA’s Mars rover Curiosity through the 1284 Martian day, or sol, of the rover’s mission on Mars (March, 17, 2016).
Numbering of the dots along the line indicate the sol number of each drive. North is up. From Sol 1283 to Sol 1284, Curiosity had driven a straight line distance of about 79.25 feet (24.16 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Early the next morning, Curiosity will take several Navcam, Mastcam, and ChemCam observations to monitor the atmospheric composition and opacity and search for clouds.
![]()
A House Space Subcommittee grilled NASA chief, Charles Bolden regarding NASA’s proposed budget for Fiscal Year 2017.
The hearing held today was titled “An Overview of the Budget Proposal for the National Aeronautics and Space Administration for Fiscal Year 2017.”
![]()
Realistic budget?
In a statement, Space Subcommittee Chairman Brian Babin (R-Texas) noted: “Unfortunately, this administration has once again done a disservice to NASA, its employees, and our nation by providing a budget request that ignores the budget agreement, requesting mandatory funding for NASA. I had hoped that the administration would demonstrate leadership by proposing a realistic budget, but instead we were presented with a list of unfunded priorities.
Grounded astronauts
From Chairman Lamar Smith (R-Texas): “There are some areas of agreement between the Committee and the administration in NASA’s Fiscal Year 2017 budget request. But this proposed budget continues to tie our astronauts’ feet to the ground and makes a Mars mission all but impossible.

Credit: Lockheed Martin
Resources:
1)
The hearing charter, loaded with information on NASA programs, is available at:
2)
NASA’s Charles Bolden’s prepared testimony is available at:
3)
To video view the entire hearing held on Thursday, March 17, 2016 – 10:00am | 2318 Rayburn House Office Building, go to:
https://www.youtube.com/watch?v=ry9BwJRmeYk
4)
The full opening statement from Smith is here:
5)
The Opening statement of Chairman Brian Babin (R-Texas) is here at:

