Archive for January, 2016
Credit: NEX-SAG
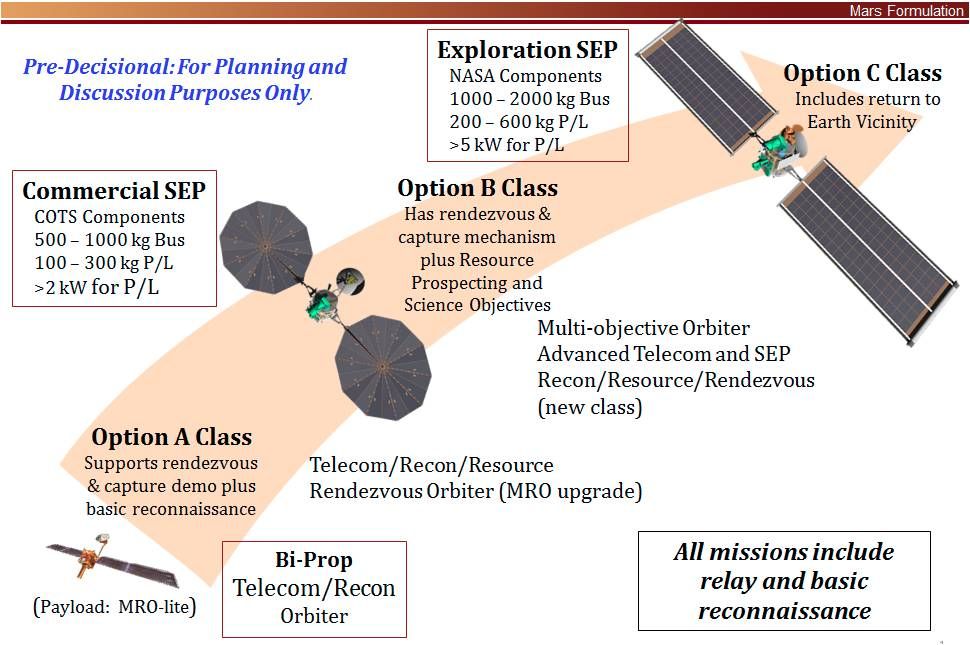
NASA is reviewing the idea of a multi-function next-generation Mars Orbiter.
If approved, this orbiter could be launched as early as 2022. One of the orbiter’s functions could be focused on the preparation for exploration by humans at Mars.
A Science Analysis Group (SAG) of the Mars Exploration Program Analysis Group dubbed NEX-SAG reports that a Mars Orbiter — utilizing Solar Electric Propulsion — and toting advanced telecommunications gear, could perform a 5-year mission in low Mars orbit.
New science
NEX-SAG suggests that the advanced Mars orbiter “could provide exciting new science and resource identification in addition to other programmatic functions,” such as:
- Replenish and advance the telecommunications and reconnaissance capability. Launched in 2022, this orbiter could back-up aging relay capabilities for a 2020 Mars rover in extended mission and for future spacecraft missions, whether for Mars sample return or in preparation for exploration by humans at Mars.
- Demonstrate progress in Mars orbit towards potential sample return, via release, rendezvous, and capture of a simulated orbiting container, or — if possible — the actual return of an orbiting sample cache from the surface of Mars to Earth vicinity.
- Conduct new science investigations motivated by discoveries about Mars over the last several years.
- Find resources on Mars for future missions, especially in support of human surface exploration, and address Strategic Knowledge Gaps (SKGs).
Scouting for martian resources
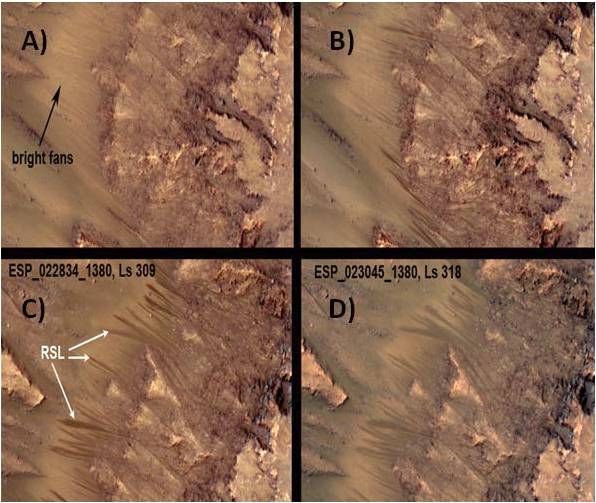
Recurring slope lineae (RSL) move down Martian slopes suggestive that water is flowing on Mars today. Images of RSL in Palikir Crater in Newton Basin showing: (A) faded RSL on bright fans from the previous Mars year and a hint of new RSL in bedrock regions; (B) new RSL appear; (C) the RSL lengthen downslope in early southern summer; and (D) the RSL are fading by mid-summer.
The ability of radar to probe below the surface could be key to tracing the source of subsurface water flow related to these features.
Credit: MRO HiRISE /U. Arizona/JPL/NASA
NEX-SAG participants point to the advanced Mars orbiter locating such resources as finding and quantifying the extent of shallow ground ice within a few meters of the surface and characterize its ice-free overburden; identify deposits with hydrated minerals as a water resource, and potential contaminants within these deposits; and spot site-specific mineral resources and geotechnical properties.
Furthermore, the next-generation Mars orbiter would extend the atmospheric climatology data base about the Red Planet with diurnal coverage and wind measurements.
Lastly, given Solar Electric Propulsion, the orbiter could address gravity and surface characteristics of the Martian moons – Phobos and Deimos.

Curiosity Front Hazcam Left B image taken on Sol 1222, January 13, 2016
Credit: NASA/JPL-Caltech
On Mars, the Curiosity rover’s Sol 1221 drive went well, notes USGS’s Ken Herkenhoff at the Astrogeology Science Center in Flagstaff, Arizona.
That drive included “a wheel scuff” in the dark sand dune, and the rover is in a good position for contact science,” he adds.
At this moment, the robot is engaged in activities during Sol 1223.
According to Herkenhoff, the Sol 1223-1224 plan calls for the robot to carry out arm activities, limited by the available power.
On tap is use of the Mars Hand Lens Imager (MAHLI) to take pictures of a couple of locations on the dune surface that has not been disturbed by the wheels, and of sand that was disturbed by the wheel scuff.

Image from Curiosity’s Mastcam Left taken on Sol 1221, January 12, 2016.
Credit: NASA/JPL-Caltech/MSSS
Undisturbed sand sampling
From there, the Alpha Particle X-Ray Spectrometer (APXS) is slated to be placed as close as possible to the scuffed sand for an overnight integration.
On Sol 1224, the robot’s scoop will be used to acquire a sample of the undisturbed dune sand, Herkenhoff reports.
This sample will be sieved and the finest material, less than 0.15 mm diameter grains, will be dropped into Curiosity’s Sample Analysis at Mars (SAM) Instrument inlet. “SAM will then analyze the sample overnight, into the wee hours of Sol 1225,” Herkenhoff adds.
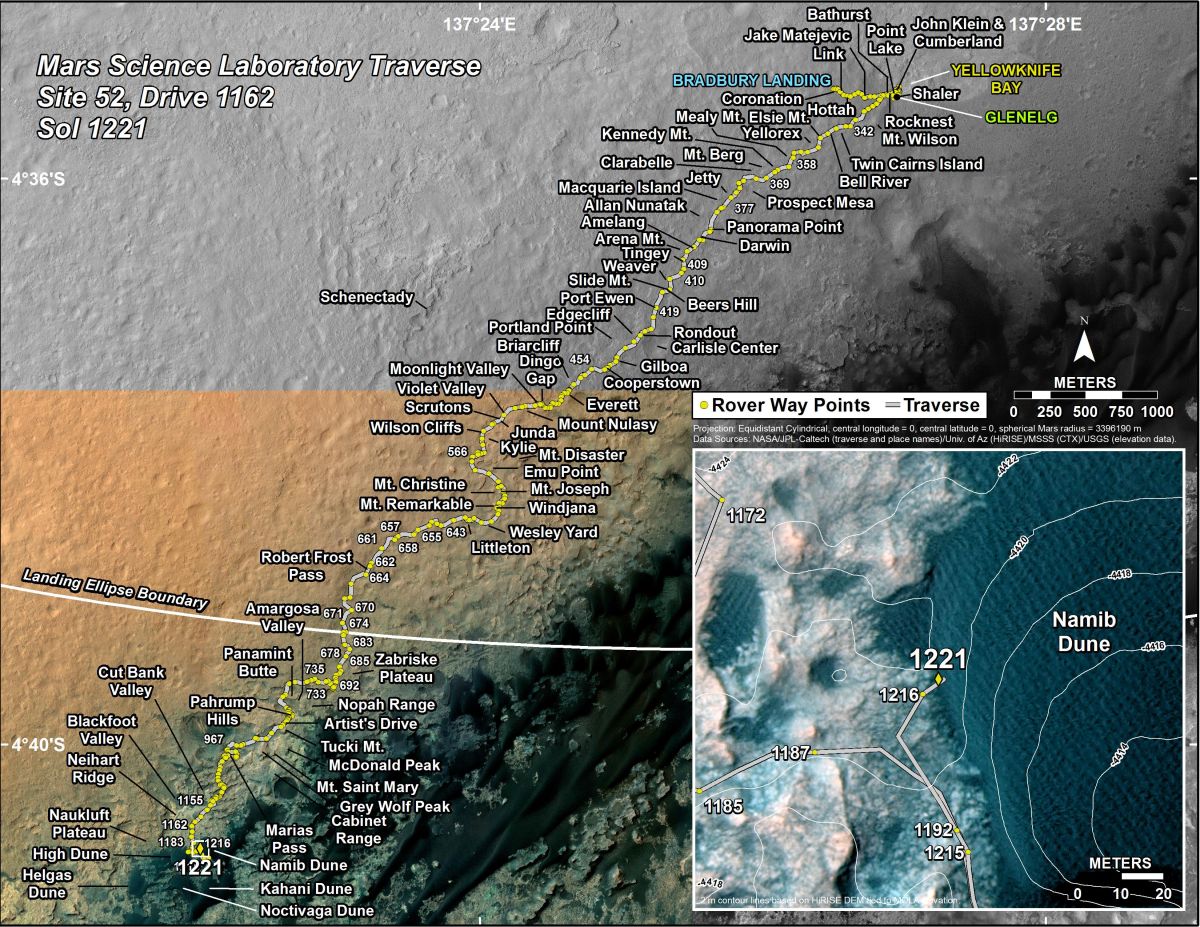
Curiosity’s Traverse Map Through Sol 1221. This map shows the route driven by NASA’s Mars rover Curiosity through the 1221 Martian day, or sol, of the rover’s mission on Mars as of January, 13, 2016.
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile). From Sol 1216 to Sol 1221, Curiosity had driven a straight line distance of about 16.51 feet (5.03 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Credit: SNC
NASA made a major Space Station cargo transport announcement today selecting the Sierra Nevada Corporation’s (SNC) reusable Dream Chaser spacecraft, along with capsules provided by Orbital ATK and SpaceX.
NASA awarded the three cargo contracts to ensure the critical science, research and technology demonstrations that are informing the agency’s journey to Mars are delivered to the International Space Station (ISS) from 2019 through 2024.
The agency unveiled its selection of Orbital ATK of Dulles, Virginia; Sierra Nevada Corporation of Sparks, Nevada; and SpaceX of Hawthorne, California to continue building on the initial resupply partnerships with two American companies.
These Commercial Resupply Services (CRS-2) contracts are designed to obtain cargo delivery services to the space station, disposal of unneeded cargo, and the return of research samples and other cargo from the station back to NASA.
Lifting-body
Dream Chaser is a multi-mission, commercial, lifting-body vehicle capable of transportation services to low-Earth orbit (LEO) destinations, including the International Space Station (ISS).
SNC has developed one common Dream Chaser spacecraft airframe, which is dubbed their Space Utility Vehicle (SUV) due to its mission flexibility.
There are currently two Dream Chaser variants optimized specifically for either uncrewed or crewed missions, known as the Dream Chaser Cargo System and Dream Chaser Space System, respectively.

Credit: NASA
According to SNC, additional variants may be developed for future mission needs.
The announcement regarding CRS-2 was made today during a news conference from NASA’s Johnson Space Center in Houston.
Science, Space, and Technology Committee Chairman Lamar Smith (R-Texas) and Space Subcommittee Chairman Brian Babin (R-Texas) released the following statement today after NASA announced awardees for the next phase of the Commercial Cargo program.
“Congratulations to SpaceX, Orbital ATK, and Sierra Nevada on their awards for the next round of Commercial Cargo Resupply Contracts, which also supports our human spaceflight program. These companies and the thousands they employ have a crucial task before them as they supply the International Space Station.”

Credit: Big Ear Radio Telescope
Back in 1977, the Big Ear Radio Telescope at Ohio State University detected a strong narrowband signal northwest of the globular star cluster M55 in the constellation Sagittarius.
At the time, that signal stirred up the juices of Jerry Ehman at Ohio State’s Big Ear effort, prompting him to write “Wow!” in the margin of a computer printout of the signal.
Interstellar beacon?
The Wow episode has turned up a volume of conversation over the past decades. Had an interstellar beacon been recorded, the best candidate ever seen by searches for radio signals from the stars?
This saga is well-documented in an excellent book written by Robert Gray: The Elusive Wow – Searching for Extraterrestrial Intelligence (Palmer Square Press, 2012).
Credit: Palmer Square Press
Cometary culprits
But now a new twist to the story stems from a paper authored by Antonio Paris of St. Petersburg College in Florida and Evan Davies of The Explorers Club in New York.
In a Washington Academy of Sciences paper they contend that a comet or perhaps two comets could be the source of the hydrogen line signal detected by the Ohio State University on August 15, 1977. Chemicals in comets emit radio waves, they note.
The cometary culprits they point to are 266P/Christensen and /2008 Y2 (Gibbs), suggesting that “their orbital period could account for why the ‘Wow’ signal was intermittent and not detected during subsequent searches of the area.
From July 27, 1977 to August 15, 1977 those two comets were transiting in the neighborhood of the Chi Sagittarii star group, Paris and Davies report in their paper. All that adds up, the researchers contend, to those comets being “strong candidates” for the origin of the 1977 “Wow” signal.
Wrong explanation
But not so fast, responds Robert Dixon. He was a key figure in bringing the Big Ear instrument to bear on the search for other star folk.

The Big Ear Observatory.
Courtesy of North American Astrophysical Observatory
Dixon told Inside Outer Space that SETI experts in his group are facing off on Facebook about the comet hypothesis.
“The proposed explanation is wrong,” Dixon said. “It ignores the fact that the signal turned on or off within a few minutes, and the comet surely could not have done that. We had two closely-spaced beams in the sky, and the signal appeared in only one of them,” he said.
Resources
To bone up on the discussion, go to the Paris and Davies paper:
“Hydrogen Clouds from Comets 266/P Christensen and P/2008 Y2 (Gibbs) are Candidates for the Source of the 1977 “WOW” Signal” at:
http://planetary-science.org/wp-content/uploads/2016/01/Paris_Davies-H-I-Line-Signal.pdf
Meanwhile, keep your ears and eyes focused on follow-up SETI chat – even if it’s Earth-emitted.

London protest of Russia’s plan to send macaque monkeys to Mars.
Credit: PETA/UK
Russia’s interest in hurling four macaque monkeys to Mars in 2017 has sparked a protest outside the Russian Embassy in London.
People for the Ethical Treatment of Animals (PETA) staged the event today, underscored by a PETA supporter — Samantha Bentley – body painted as a monkey, wearing a space helmet, and lying in a pool of blood to become a “Bleeding Space Monkey.”
The protest site, the Russian Embassy in Kensington Palace Gardens, London, also sported a sign next to a Russian flag: “Monkeys on Mars: One Giant Leap Backwards for Mankind.”
Other protesters called on Russia to use exclusively high-tech, 21st century space-exploration methods in its space program – not non-human primates.
Dark days of the space race
“If this experiment goes forward, Russia will return to the darkest days of the space race…a time when primates died horrifically from suffocation, overheating and impact,” explains Julia Baines, PETA Science Policy Advisor.

Credit: PETA/UK
“PETA is calling on the Russian Federal Space Agency,” Baines adds in a press statement, “to put a stop to this ill-advised suicide mission and be a true pioneer in modern-day space exploration.”
PETA has also sent a letter urging the Russian space agency to cancel the planned experiment.
For more information, go to:
Curiosity’s Navcam Right B took this image on Sol 1216, January 7, 2016.
Credit: NASA/JPL-Caltech
(Update)
The Curiosity rover has recovered from a motor controller anomaly, reports USGS Mars scientist, Ken Herkenhoff. Tactical operations are back on track, with a drive to the dune sampling area planned for Sol 1221.
Late last week, the rover encountered an anomaly, reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona and a member of the Mars Science Laboratory science team.
The problem prevented any use of motors during Sol 1217, putting off “bump and scuff” action by the robot. A bump is a short drive, with Curiosity turning its right front wheel to create a scuff in the sand.
“No motors meant no drive and no scuff, and most of our planned activities did not occur,” Edgar explains. So the day turned into a recovery day, “first trying to assess what happened and why it happened, and then figuring out how to proceed.”
“Ultimately we delivered some ChemCam and Mastcam activities that will help to assess the composition of the soil, and search for any wind-driven movement of fines,” Edgar adds.
A weekend plan provided an opportunity to do several coordinated change-detection observations using both the robot’s Mastcam and Rover Environmental Monitoring Station (REMS) at multiple times throughout the day.
Looking ahead to this week, Edgar says, “we’re hoping to proceed with the bump and scuff to get back on track with the Namib Dune sampling activities!”

Rosetta’s Optical, Specroscopic, and Infrared Remote Imaging System (OSIRIS) acquired this image of Comet 67P/Churyumov-Gerasimenko on December 20, 2015 from a distance of 57 miles (91.5 kilometers).
Credit: ESA/Rosetta/MPS for OSIRIS Team/MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The European Space Agency’s (ESA) comet lander bounced to full stop on November 12, 2015 atop Comet 67P/Churyumov-Gerasimenko.
The last clear sign of life from the probe was received on July 9, 2015. Since then mum’s been the word.
But now planned for January 10th, ground controllers will, for the first time, send a command to Philae to spin up its flywheel. The hope is to impart some angular momentum to the lander as it sits silently on the comet.
Time running out
“At best, the spacecraft might shake dust from its solar panels and better align itself with the Sun,” explains Technical Project Manager Koen Geurts.
In the worst case, the lander will not receive the commands sent by engineers and scientists at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt (DLR).

German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt (DLR) in Cologne is home to the control center for the Philae comet lander.
Credit: DLR
DLR in Cologne is home to the control center for the Philae lander.
“Time is running out, so we want to explore all possibilities,” says DLR Project Leader Stephan Ulamec.
Lander-hostile
By the end of January things will become increasingly uncomfortable for Philae as the comet continues to move away from the Sun. Conditions on the comet will be “lander-hostile” and Philae’s mission is expected to come to a natural end, according to a DLR press statement.
“There is a small chance,” adds Cinzia Fantinati, an Operations Manager on the DLR control room team.
“We want to leave no stone unturned,” Fantinati explains. The communications unit on board Rosetta will remain active and continue to listen for a signal from Philae beyond mid-January.
ESA’s Rosetta orbiter that dispatched Philae will remain active until September 2016.
Rosetta is an ESA mission with contributions from its member states and NASA. Rosetta’s Philae lander is provided by a consortium headed by DLR, the Max Planck Institute for Solar System Research (MPS), the French Space Agency (CNES) and the Italian Space Agency (ASI).

Curiosity’s Navcam Left B took this image on Sol 1216 January 7, 2016.
Credit: NASA/JPL-Caltech
Just entering Sol 2017, the NASA Curiosity Mars rover took another spin of the wheels, traveling over 140 feet (43 meters) toward the Namib Dune sampling location.
“That meant that today we had to decide on our final sampling spot, and there were many different factors to consider,” advised Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
It has been busy trying to figure out our top science priorities, Edgar adds.

Curiosity’s Navcam Right B camera image taken on Sol 1215 January 6, 2016.
Credit: NASA/JPL-Caltech
“We eventually settled on a location that met all of our science objectives,” Edgar notes, “a sharp-crested ripple that would provide access to sample both coarse and fine-grained material, that was relatively dust free, implying more activity, and would allow a favorable rover orientation. Now we just have to hope that the drive and wheel scuff go smoothly!”
Curiosity is slated to drive toward the sampling location, and will turn the right front wheel to create a scuff in the sand.
“After the drive we’ll take more imaging to prepare for targeting in the weekend plan,” Edgar said. “In the afternoon, we’ll also use Mastcam for a change-detection observation of a nearby ripple…so I’m excited to see how the plan works out!”

Curiosity Rover’s Location for Sol 1215.
This map shows the route driven by NASA’s Mars rover Curiosity through the 1215 Martian day, or sol, of the rover’s mission on Mars as of January, 06, 2016.
Numbering of the dots along the line indicate the sol number of each drive. North is up. From Sol 1204 to Sol 1215, Curiosity had driven a straight line distance of about 172.01 feet (52.43 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Image Credit: NASA/JPL-Caltech/Univ. of Arizona
Planned rover activities are just that, subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

NASA has created a special office to deal with coordinating response to threatening near-Earth objects (NEOs).
Credit: Texas A&M
A major step has been taken to coordinate U.S. agencies and intergovernmental efforts to respond to future near-Earth objects that threaten Earth.
NASA announced today the creation of a Planetary Defense Coordination Office (PDCO).
Lindley Johnson, NASA’s current near-Earth object (NEO) program executive will lead the newly established office.

NASA’s Lindley Johnson will head the space agency’s new Planetary Defense Coordination Office.
Credit: Leonard David
The PDCO will reside within NASA’s Planetary Science Division, in the agency’s Science Mission Directorate in Washington, D.C.
“The formal establishment of the Planetary Defense Coordination Office makes it evident that the agency is committed to perform a leadership role in national and international efforts for detection of these natural impact hazards, and to be engaged in planning if there is a need for planetary defense,” said Johnson in a NASA statement.
Planetary defense duties
What will the office do?
- Supervision of all NASA-funded projects to find and characterize asteroids and comets that pass near Earth’s orbit around the Sun;
- Lead the coordination of interagency and intergovernmental efforts to plan response to any potential impact threats.
- Improve and expand on past efforts with other U.S. federal agencies and departments, such as the Federal Emergency Management Agency (FEMA).
- Continue to assist with the coordination across the U.S. government, including planning for response to an actual impact threat and working in conjunction with FEMA, the Department of Defense, other U.S. agencies, and international counterparts.
- Issue notices of close passes and warnings of any detected potential NEO impacts, based on credible science data.
Collaborative relationship
“FEMA is dedicated to protecting against all hazards, and the launch of the coordination office will ensure early detection and warning capability, and will further enhance FEMA’s collaborative relationship with NASA,” said FEMA Administrator Craig Fugate in a space agency press statement.
“Even if intervention is not possible, NASA would provide expert input to FEMA about impact timing, location, and effects to inform emergency response operations. In turn, FEMA would handle the preparations and response planning related to the consequences of atmospheric entry or impact to U.S. communities,” NASA explains in its announcement of the new PDCO.

Chelyabinsk sky rendering is a reconstruction of the asteroid that exploded over Chelyabinsk, Russia on Feb. 15, 2013. Scientific study of the airburst has provided information about the origin, trajectory and power of the explosion. This simulation of the Chelyabinsk meteor explosion by Mark Boslough was rendered by Brad Carvey using the CTH code on Sandia National Laboratories’ Red Sky supercomputer. Andrea Carvey composited the wireframe tail. Photo by Olga Kruglova.
Credit: Sandia National Laboratories.
According to a statement from the National Science Foundation (NSF):
“NSF welcomes the increased visibility afforded to this critical activity,” said Nigel Sharp, program director in the agency’s Division of Astronomical Sciences. “We look forward to continuing the fruitful collaboration across the agencies to bring all of our resources – both ground-based and space-based – to the study of this important problem,” he added.
Wake-up call
More than 13,500 near-Earth objects of all sizes have been discovered to date—more than 95 percent of them since NASA-funded surveys began in 1998. About 1,500 NEOs are now detected each year.
Considered a 21st century wake-up call, the Chelyabinsk super-fireball explosion over Russia in 2013 spotlighted dangers from the heavens – an event that helped prod international resolve to deal with NEOs in an organized manner.
For its part, NASA’s long-term planetary defense goals include developing technology and techniques for deflecting or redirecting objects that are determined to be on an impact course with Earth.
Reduce the risk
The recently passed federal budget for fiscal year 2016 includes $50 million for NEO observations and planetary defense, representing a more than ten-fold increase since the beginning of the President Obama administration.
Indeed, within the White House National Space Policy released on June 28, 2010, it notes under “Civil Space Guidelines” that the Administrator of NASA shall:
“Pursue capabilities, in cooperation with other departments, agencies, and commercial partners, to detect, track, catalog, and characterize near-Earth objects to reduce the risk of harm to humans from an unexpected impact on our planet and to identify potentially resource-rich planetary objects.”
For more information on NASA’s Planetary Defense Coordination Office, this website is to be updated with additional details:
https://www.nasa.gov/planetarydefense
NOTE: The idea of such an office has been years in the making. For example, go to my Space.com article from 2010:
Planetary Defense Coordination Office Proposed to Fight Asteroids
http://www.space.com/9356-planetary-defense-coordination-office-proposed-fight-asteroids.html

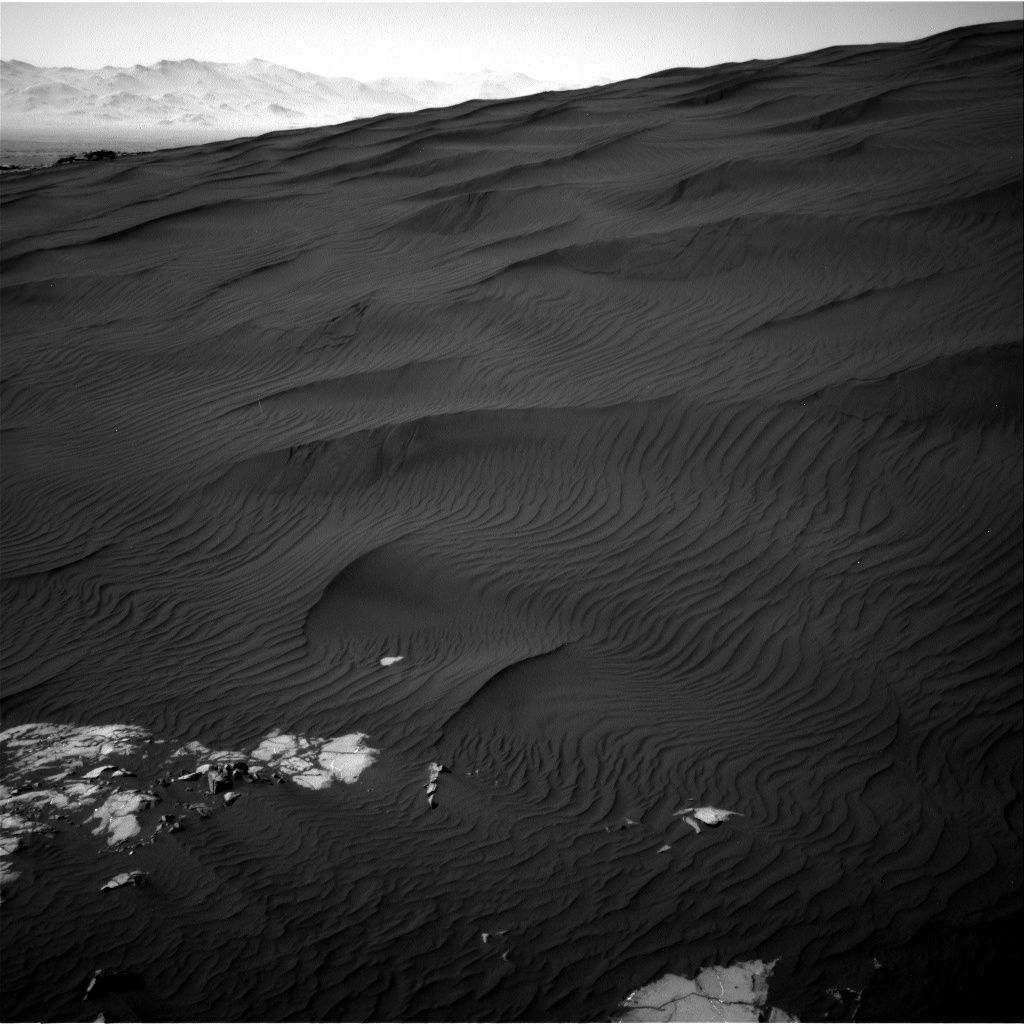
This view of the downwind face of “Namib Dune” on Mars covers 360 degrees, including a portion of Mount Sharp on the horizon. The site is part of the dark-sand “Bagnold Dunes” field along the northwestern flank of Mount Sharp. Images taken from orbit indicate that dunes in the Bagnold field move as much as about 3 feet (1 meter) per Earth year.
Credit: NASA/JPL-Caltech/MSSS
Working hard in Sol 1215 mode, NASA’s Curiosity Mars rover is partway through the first up-close study ever conducted of extraterrestrial sand dunes.
The rover is providing dramatic views of a dune’s steep face, where cascading sand has sculpted very different textures than the wavy ripples visible on the dune’s windward slope.
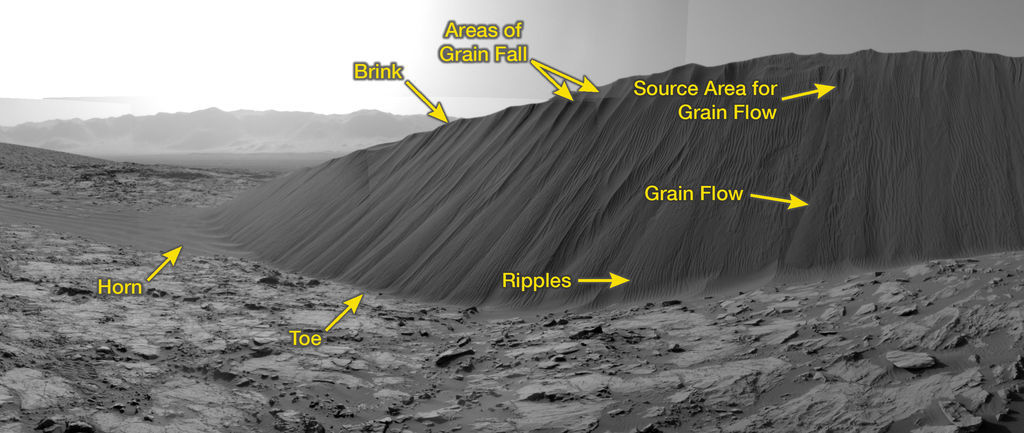
This view from NASA’s Curiosity Mars Rover shows the downwind side of “Namib Dune,” which stands about 13 feet (4 meters) high. The site is part of Bagnold Dunes, a band of dark sand dunes along the northwestern flank of Mars’ Mount Sharp.
Credit: NASA/JPL-Caltech
The downwind side of an active sand dune has a steep slope called a slip face.
New location
“After wrapping up our holiday investigation on the lee side of Namib Dune, it’s time to move to a new location along the dune to sample the chemistry and mineralogy of the sand,” reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Recent rover tasks included checking out the wheels, followed by a long drive.

Taking a January 5 look at wheel damage using the Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
The new site will allow easier access for sampling part of the active dune, Edgar adds.
The plan calls for the robot to perform a number of atmospheric monitoring activities, including several Navcam movies, and a passive sky observation.
According to the Jet Propulsion Laboratory (JPL), Curiosity’s dune-investigation campaign is “designed to increase understanding about how wind moves and sorts grains of sand, in an environment with less gravity and much less atmosphere than well-studied dune fields on Earth.”
Active dunes
The Bagnold Dunes that the Mars machinery is monitoring are active.
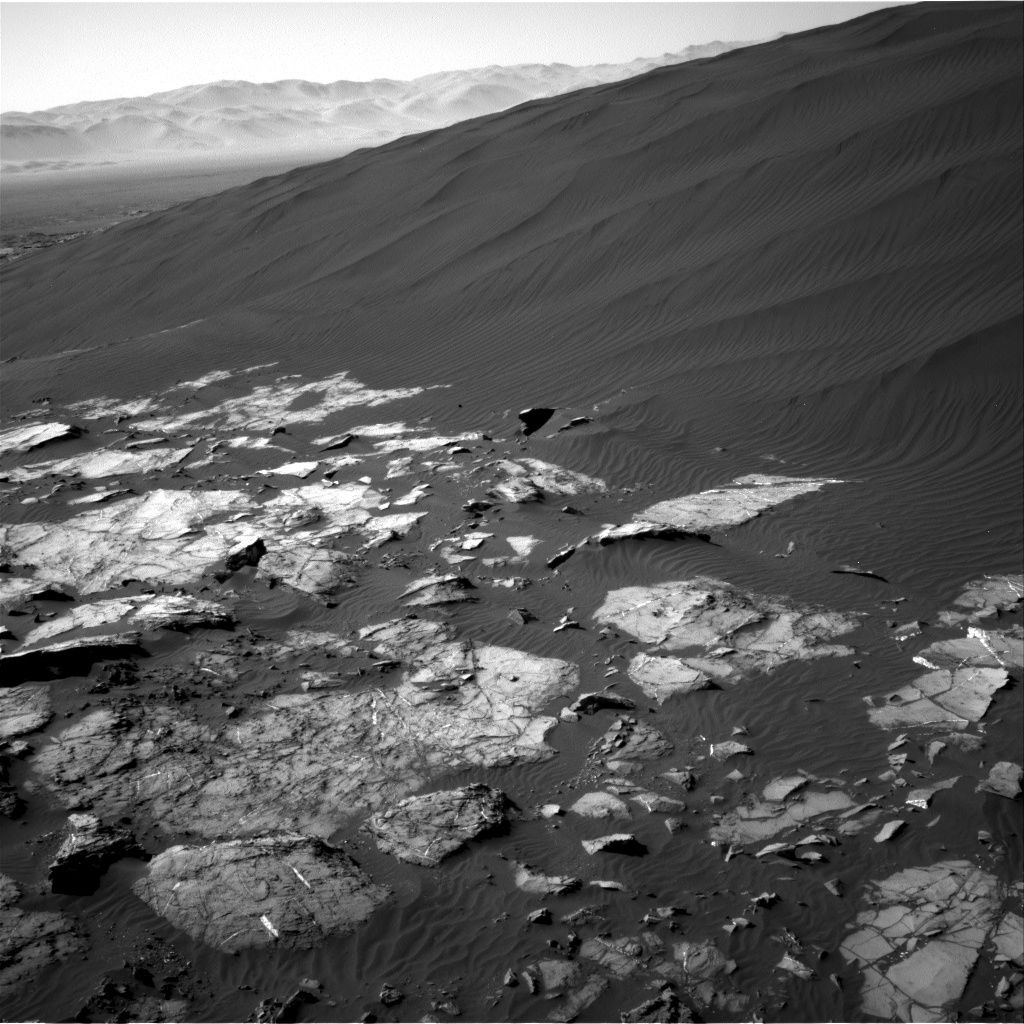
Curiosity Navcam Right B image taken on Sol 1215, January 6, 2016.
Credit: NASA/JPL-Caltech
“Sequential images taken from orbit over the course of multiple years show that some of these dunes are migrating by as much as a yard, or meter, per Earth year,” according to JPL.
No sand slide has yet been caught by Curiosity, “but the rover’s images of the Namib Dune slip face show where such slides have occurred recently.”
The dunes being surveyed are likely most active in Mars’ southern summer, rather than in the current late-fall season.

