Archive for 2015

Architectural work is on-going to develop a Self-deployable Habitat for Extreme Environments.
Credit: SHEE Project
On the Moon or Mars, cozy and self-deployable autonomous habitats might rule the day and night given the extreme climes at those extraterrestrial addresses.
Enter the “SHEE project” – the Self-deployable Habitat for Extreme Environments.
The concept is the product of an architecture research idea initiated by architect Ondrej Doule, detailed here August 31 at a session on space habitats at the American Institute of Aeronautics and Astronautics’ (AIAA) Space 2015 meeting.
This space habitat work may serve dual purposes — not only for creating off planet, home-away-from-home domiciles – but also useful here on Earth.

Work on extraterrestrial habitats for the Moon and Mars may find down-to-Earth application to help those afflicted by natural or human-made disasters.
Credit: SHEE Project
Videos and other photos
Time-lapse movie sped up 25 times shows a habitat equipped with internal furnishing and subsystems. The folding process was monitored earlier this year during a Self-deployable Habitat for Extreme Environments (SHEE) workshop held in Marseille, France.
For more details, go to my new Space.com story:
Future Mars Explorers Could Live in Habitats That Build Themselves
by Leonard David, Space.com’s Space Insider Columnist
September 16, 2015 07:20am ET
http://www.space.com/30553-self-deploying-mars-habitats-shee.html
Credit: Richard Clar
Very special radio signals are slated to bounce off the surface of the Moon on September 26 – one of them a sound produced from the Electrocardiogram (EKG) during Neil Armstrong’s historic “One small step” onto the lunar surface.
The Giant Step and Lune sur la Lune projects pay tribute to Apollo astronaut Neil Armstrong’s giant leap on the Moon back in 1969 and also salute the far side of the Moon itself.

Credit: NASA
Sonification tone
Richard Clar, a new media interdisciplinary artist from Northern California, researched the Apollo Archives coming across an EKG of Neil Armstrong as he took the first step on the Moon on July 20, 1969.

Artist Richard Clar.
Credit: Art Technologies
Data scientist, Ryan Compton, created a “sonification tone” from Armstrong’s actual EKG graph. Then prominent Los Angeles-based double-bass jazz performer and composer Roberto Miranda used the tone to create compelling sounds that have been called “edgy and hauntingly beautiful.”
Clar’s interest in the effort was piqued after hearing about an Earth-Moon-Earth bounce (EME) from Italian artist and colleague, Daniela de Paulis, who together with radio specialist Jan van Muijlwijk developed the process of using EME to send images to the moon and back in 2009.
Far side image
For Lune sur la Lune, an image of the far side of the Moon will be transmitted in a poetic gesture onto the Earth-facing side of the Moon.

Dingeloo Radio Observatory in the Netherlands.
Credit: ASTRON, the Netherlands Institute for Radio Astronomy
Depending on weather conditions these radio transmissions to the Moon and back will emanate from a radio dish in Italy. The bounce back from the Moon will be received at Dingeloo Radio Observatory in the Netherlands.
In addition, an image of the first footprint on the Moon will be transmitted and bounced back to Dwingeloo.
Rock the moon
“I wanted the art to say something about the first humans to set foot on the moon,” explains Clar. “Think how many living beings have observed the Moon for eons…and now we have made a number of trips to the Moon and back. I want people to have new experiences through my artwork,” he says in a press statement.
Many of Clar’s themes originate in space environment issues, such as orbital debris, war and peace, the Search for Extraterrestrial Intelligence (SETI), and water management on Earth.
Shortly after the sound and image from Giant Step and Lune sur la Lune are received at the Dwingeloo radio receiving site they will be accessible to the world at:
For more information on Clar’s artwork over the years, go to:

Space entrepreneur, Jeff Bezos.
Credit: Blue Origin
Entrepreneur Jeff Bezos of Amazon.com fame announced his plans today during Florida Space Coast festivities.
Here are his prepared remarks released by his rocket company, Blue Origin:
Today we announced that we’ll be flying our orbital launch vehicle from Florida. Cape Canaveral has long been a gateway to humankind’s greatest adventures. As a kid, I was inspired by the giant Saturn V missions that roared to life from these shores. Now we are thrilled to be coming to the Sunshine State for a new era of exploration.

First Developmental Test Flight of New Shepard on April 29, 2015 from his Texas spaceport.
Credit: Blue Origin
Our new home on the Space Coast is anchored by the launch site at Complex 36. During its 43 years of service, 145 launches thundered into space from this site. The Mariner missions – the first U.S. spacecraft to visit other planets – lifted off from Complex 36. So did Pioneer 10, the first spacecraft to travel through the asteroid belt; Surveyor 1, the first U.S. spacecraft to land softly on the Moon; and multiple weather, communications and national defense payloads hopped their rides to space from LC-36. The site saw its last launch in 2005 and the pad has stood silent for more than 10 years – too long. We can’t wait to fix that.
One of the unique things about our Florida operations is that we aren’t just launching here, we’re building here. At Exploration Park, we’ll have a 21st century production facility where we’ll focus on manufacturing our reusable fleet of orbital launchers and readying them for flight again and again. Locating vehicle assembly near our launch site eases the challenge of processing and transporting really big rockets.

Jeff Bezos unveils future plans for Florida Space Coast.
Credit: NASA TV via GeekWire
We’ll be launching from here later this decade. You will hear us before you see us. Our American-made BE-4 engine – the power behind our orbital launch vehicle – will be acceptance tested here. Our BE-4 engine will also help make history as it powers the first flight of United Launch Alliance’s Vulcan rocket.
Residents of the Space Coast have enjoyed front-row seats to the future for nearly 60 years. Our team’s passion for pioneering is the perfect fit for a community dedicated to forging new frontiers. Keep watching.
Gradatim Ferociter!
Jeff Bezos

Credit: Virgin Galactic
The performance of Virgin Galactic’s air-launched system, LauncherOne, is to be “significantly” increased – nearly doubling the amount of payload customers can deliver to orbit for the same price.
For a price below $10 million, LauncherOne will now be able to launch 440 pounds (200 kilograms) into the standard Sun-Synchronous Orbit most commonly desired by small satellite missions.
That’s the word today at the yearly World Business Satellite Week in Paris, France.
Add to air launch fleet
Customers will also be able to purchase further increases in performance to the same orbit, as well as launches that reach other altitudes or inclinations. To lower Earth orbits the system will be capable of launching over 800 pounds (400 kilograms) of payload.
According to a press statement, Virgin Galactic is in the final stages of acquiring a commercial aircraft to add to its air launch fleet, which includes WhiteKnightTwo. Doing so enables both the increased payload capacity and significantly higher flight rate.

Eye on the small satellite market.
Credit: Virgin Galactic
The company expects to finalize this aircraft acquisition in the coming months.
SmallSat market
With full, private funding already committed to the program, the company said today that LauncherOne “remains on target” to be the most flexible and responsive launch vehicle to offer affordable, dedicated launches to smaller satellites.
“LauncherOne will be ready to meet the rapidly expanding needs of satellite startups, space agencies, and research institutions thanks to the investments we’ve already made in our engines, tanks, avionics, and our production infrastructure,” said George T. Whitesides, Virgin Galactic’s CEO.
LauncherOne’s customer base includes firms such as global communications company OneWeb. Virgin Galactic recently signed up with OneWeb to one of the largest commercial launch orders in history for flights of its internet service satellites on LauncherOne.

Credit: RAND
A new RAND Corporation report suggests that although China continues to lag behind the United States in terms of aggregate military hardware and operational skills, it has improved its capabilities relative to those of the United States in many critical areas.
Regarding space capabilities, the report includes these chapters:
— U.S. Counterspace Capabilities Versus Chinese Space Systems
— Chinese Counterspace Capabilities Versus U.S. Space Systems
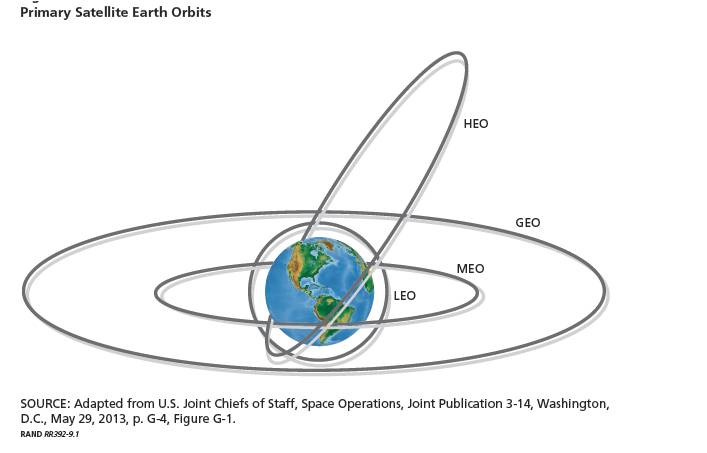
From RAND report: The U.S.-China Military Scorecard: Forces, Geography, and the Evolving Balance of Power 1996–2017.
The report observes:
1)
While dedicated U.S. counterspace capabilities are limited, the United States could considerably augment its existing capabilities with dual-use systems. Whether U.S. leaders would choose to do so in a war with China is questionable, given China’s ability to respond with attacks on U.S. space capabilities and the greater degree to which the U.S. military depends on those systems for force enhancement. However, should the PLA attack U.S. space systems first, U.S. leaders might have little to lose in striking back.
2)
Chinese counterspace capabilities are increasing across the board, though not necessarily at a uniform pace. In a number of areas, the U.S. military is taking steps to mitigate the threat. Whether these efforts succeed in making U.S. systems safe or, at least, unattractive targets should a U.S.-China conflict occur will depend on what investments the United States makes in space defense in the coming years and whether it can find ways to reduce its systems’ vulnerabilities.

From the RAND report: The U.S.-China Military Scorecard: Forces, Geography, and the Evolving Balance of Power 1996–2017
The entire RAND report, “The U.S.-China Military Scorecard: Forces, Geography, and the Evolving Balance of Power 1996–2017,” can be found at:
http://www.rand.org/content/dam/rand/pubs/research_reports/RR300/RR392/RAND_RR392.pdf

Credit: NASA/National Additive Manufacturing Innovation Institute
NASA’s Centennial Challenges includes an innovative 3-D Printed Habitat Challenge – a competition that was initiated last May.
NASA and the National Additive Manufacturing Innovation Institute — known as America Makes — are holding a new $2.25 million competition to design and build a 3-D printed habitat for deep space exploration, including the agency’s journey to Mars.
Last week, the top 30 finalists for the Challenge were announced
Construction technology
The multi-phase 3-D Printed Habitat Challenge is designed to advance the additive construction technology needed to create sustainable housing solutions for Earth and beyond.
The top 30 submissions will be judged and a prize purse of $50,000 will be awarded at the 2015 World Maker Faire in New York.
The first phase of the competition runs through Sept. 27, 2015. This phase, a design competition, calls on participants to develop state-of-the-art architectural concepts that take advantage of the unique capabilities 3-D printing offers.
Two levels
The second phase of the competition is divided into two levels.
Level 1: The Structural Member Competition focuses on the fabrication technologies needed to manufacture structural components from a combination of indigenous materials and recyclables, or indigenous materials alone.
Level 2: The On-Site Habitat Competition challenges competitors to fabricate full-scale habitats using indigenous materials or indigenous materials combined with recyclables.
Both levels open for registration Sept. 26, and each carries a $1.1 million prize.
Going native on Mars
Among the winning entries, checkout:
Team LavaHive, a design of LIQUIFER Systems Group of Vienna, Austria. It’s a modular, additive-manufactured Martian habitat design using a proposed novel “lava-casting” construction technique as well as utilizing recycled spacecraft materials and structures.

LavaHive
Nested 3D-Printed Settlement Technology (N3ST) is from Team N.E.S.T. of Chile. Their design is a safe-to-fail design based on the principles of redundancy, simplicity and incrementalism.

Nested 3D-Printed Settlement Technology
Mollusca L5 is the design of LeeLabs of Brooklyn, New York. Their concept proposes a design and methodology for a Mars shell/membrane system to create a protected space for inflated habitation modules and outdoor areas while utilizing 100 percent indigenous materials as the 3D printing substrate.

Mollusca L5
NEO Native is the output from MOA Architecture of Denver, Colorado. In their submission, they say that the 3D printer of the future will be capable of scanning surrounding geology to create an adaptation of local environmental conditions based on thermal and solar requirements, soil characteristics, wind patterns, radiation hazards, and structural foundation requirements.

The NEO NATIVE
Go to an inspiring gallery of all the design finalists at:

Credit: Tyler Skrabek
The artistic talent of Tyler Skrabek has produced the new and informative poster: Spacecraft of the World.
“Spacecraft of the World represents one of my most passionate interests, space exploration, more specifically, the vehicles that aid us in our exploration endeavors,” Skrabek explains.
“With this poster I wanted to explore the actual vehicles that astronauts use to reach out into space,” Skrabek adds. “In addition, this poster explains, through visual means, the differences sections of the spacecraft and shows us the, sometimes, limited spatial volumes space astronauts endure.”

Artist Tyler Skrabek.
Credit: estoica
Skrabek of Calgary, Alberta, Canada is a graduate from the University of Lethbridge with a Bachelors of Fine Arts in New Media.
The artist explains that in 2005 he obtained the first copy of Adobe Photoshop 7 and for some 9 years he has learned the ins and outs of industry tools – specializing in Photoshop, Illustrator, InDesign, Lightroom, and various other graphical softwares. Along with these tools he became proficient in HTML, CSS and WordPress.
Take a look at his space works — including Rockets of the World and Rockets of Human Spaceflight — all available for purchase at:
https://www.etsy.com/ca/listing/243764252/spacecraft-of-the-world?ref=shop_home_active_1

Sequence of Curiosity Mastcam Left images taken on September 10, 2015 Sol 1100.
Credits: Panorama by Leonard David from NASA/JPL-Caltech/MSSS images.
NASA’s Curiosity Mars rover continues to capture striking images of its surroundings.
Curiosity has been working on Mars since early August 2012. It reached the base of Mount Sharp last year after investigating outcrops closer to its landing site and then trekking toward the mountain.

Curiosity Mastcam Left, Sol 1100, taken on September 10, 2015.
Credit: NASA/JPL-Caltech/MSSS
Today is Sol 1102 on Mars for Curiosity.
Over the weekend, mission operators were to make use of the Mars Hand Lens Imager (MAHLI) to take up-close images of the rover’s wheels, and then acquire a full suite of images of a rock dubbed “Badlands.”
Also on tap is to use the Mastcam and Chemistry & Camera (ChemCam) to observe targets named “Madison” and “Jefferson,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
On Sol 1104, the Remote Micro-Imager (RMI) and Mastcam are slated to take images of a bright ridge on the flank of Mt. Sharp.

Curiosity Mastcam Right image taken on Sol 1100, September 9, 2015.
Credit: NASA/JPL-Caltech/MSSS
Arm error
Last last week, the robot encountered an “arm error” while being stowed, Herkenhoff explains. “Apparently the shoulder azimuth motor was too cold, so the rover software halted the stow,” he adds, which precluded a rover drive that was to follow.
“The operations team had to scramble to recover from the arm error and plan science observations, but was able to put together an excellent weekend plan,” Herkenhoff reports.
Curiosity/Mars Odyssey team up
Now on tap, early on Sol 1105, Herkenhoff explains, the rover’s Mastcam and Navcam will observe the Sun and sky soon after NASA’s Mars Odyssey orbiter flies over, “so that orbiter observations can be compared with nearly simultaneous observations from the surface.”
Dates of planned rover activities are also subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Large-scale crossbedding in the sandstone of this ridge on a lower slope of Mars’ Mount Sharp is typical of windblown sand dunes that have petrified. NASA’s Curiosity Mars rover used its Mastcam to capture this vista on Aug. 27, 2015.
Credit: NASA/JPL-Caltech/MSSS
Sand dune deposits
The Jet Propulsion Laboratory has detailed some earlier rover imagery of dark sandstone. The Mars rover photos show texture and inclined bedding structures characteristic of deposits that formed as sand dunes…then were cemented into rock.
“This sandstone outcrop — part of a geological layer that Curiosity’s science team calls the Stimson unit — has a structure called crossbedding on a large scale that the team has interpreted as deposits of sand dunes formed by wind,” JPL explains.

Sets of bedding laminations lie at angles to each other. Such crossbedding is common in wind-deposited sandstone of the U.S. Southwest. An example from Utah is pictured here.
Credit: U.S. Department of the Interior/U.S. Geological Survey
As a comparison, there are look alike petrified sand dunes that are common in the U.S. Southwest.
“Geometry and orientation of the crossbedding give information about the directions of the winds that produced the dunes,” JPL’s Curiosity website adds.

This map shows the route driven by NASA’s Mars rover Curiosity through the 1100 Martian day, or Sol, of the rover’s mission on Mars (September, 10, 2015).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (roughly 0.62 mile).
From Sol 1099 to Sol 1100, Curiosity had driven a straight line distance of about 108.47 feet (33.06 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter (MRO).
Credit: NASA/JPL-Caltech/Univ. of Arizona

Driving robots from space. Landing humans on a distant object is one thing, but they will also need the fuel and equipment to work and return to Earth when done. Sending robots to scout landing sites and prepare habitats for humans is more efficient and safer, especially if the robots are controlled by astronauts who can react and adapt to situations better than computer minds.
Credit: ESA
The International Space Station (ISS) is serving as a test bed platform for controlling robots on Earth.
European Space Agency astronaut Andreas Mogensen took part in ESA’s Meteron project. The effort showcases the ability to operate lunar robots from a spacecraft orbiting the Moon.
A similar technique and technology is expected to prove useful for establishing base camps on Mars prior to human arrival.
Networks, interfaces and hardware
Meteron is developing the communication networks, interfaces and hardware to operate robots from a distance in space.
Mogensen directly controlled the Eurobot rover in a simulated troubleshooting Moon scenario. A second rover was controlled by ESA’s center in Germany, allowing the space traveler to focus on Eurobot and intervene if necessary.

ESA astronaut Andreas Mogensen commanded the Eurobot rover from the International Space Station. As part of ESA’s Meteron project, the space flyer drove the car-sized rover to repair a mockup lunar base in the Netherlands.
Credit: ESA
The demonstration showed that robots can perform valuable tasks and two can collaborate efficiently, even if they are controlled from miles apart.
European leadership
“With two very successful rover operations on Earth controlled from space on two consecutive days, we are looking forward to continuing Europe’s leadership in human-robot cooperation with many more projects,” adds Meteron project coordinator, Philippe Schoonejans.
Go to this informative video on the test at:
http://www.esa.int/spaceinvideos/Videos/2015/09/Andreas_Mogensen_controls_ground_rover_from_space

Curiosity Navcam Right B image taken on Sol 1099 September 9, 2015.
Image Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover has made some impressive images of “Bridger Basin” and has been busy acquiring a large stereo mosaic of the far wall of that Basin.
The rover’s movement on Mars was halted on Sol 1098 after reaching some 43 feet (13 meters) of a planned trek of over 80 feet (25 meters), reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
The start-stop drive occurred because Curiosity could not confirm that the path ahead was safe.
Recent glitch
One recent glitch involves the Mars Reconnaissance Orbiter (MRO).
The last 5 relays of data through MRO have returned “significantly less data” than expected. If this problem continues, Herkenhoff notes, skimpy amounts of data will be available to plan another rover drive on Sol 1100.

Curiosity Mars rover is imaging Bridger Basin.
Credit: NASA/JPL-Caltech
“Fortunately, the MRO team understands the problem and knows how to correct it,” Herkenhoff points out, so there was a good chance that all the data needed would become available for rover planning purposes today.

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on September 7, 2015, Sol 1097.
Credit: NASA/JPL-Caltech/MSSS
Dates of future planned rover activities are always subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

