Archive for September, 2015

Credit: RAND
A new RAND Corporation report suggests that although China continues to lag behind the United States in terms of aggregate military hardware and operational skills, it has improved its capabilities relative to those of the United States in many critical areas.
Regarding space capabilities, the report includes these chapters:
— U.S. Counterspace Capabilities Versus Chinese Space Systems
— Chinese Counterspace Capabilities Versus U.S. Space Systems
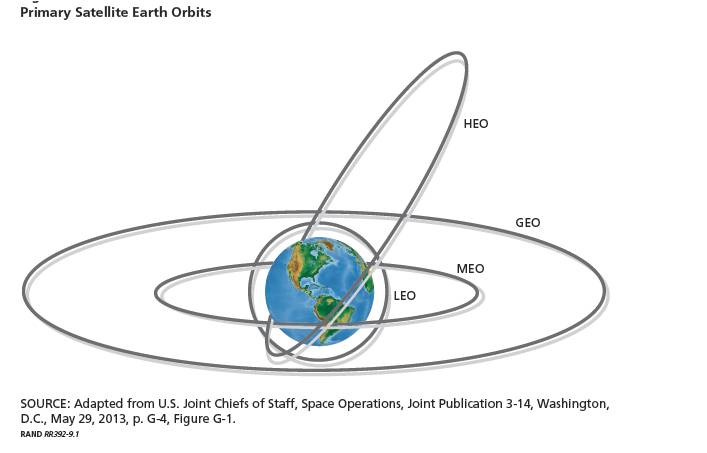
From RAND report: The U.S.-China Military Scorecard: Forces, Geography, and the Evolving Balance of Power 1996–2017.
The report observes:
1)
While dedicated U.S. counterspace capabilities are limited, the United States could considerably augment its existing capabilities with dual-use systems. Whether U.S. leaders would choose to do so in a war with China is questionable, given China’s ability to respond with attacks on U.S. space capabilities and the greater degree to which the U.S. military depends on those systems for force enhancement. However, should the PLA attack U.S. space systems first, U.S. leaders might have little to lose in striking back.
2)
Chinese counterspace capabilities are increasing across the board, though not necessarily at a uniform pace. In a number of areas, the U.S. military is taking steps to mitigate the threat. Whether these efforts succeed in making U.S. systems safe or, at least, unattractive targets should a U.S.-China conflict occur will depend on what investments the United States makes in space defense in the coming years and whether it can find ways to reduce its systems’ vulnerabilities.

From the RAND report: The U.S.-China Military Scorecard: Forces, Geography, and the Evolving Balance of Power 1996–2017
The entire RAND report, “The U.S.-China Military Scorecard: Forces, Geography, and the Evolving Balance of Power 1996–2017,” can be found at:
http://www.rand.org/content/dam/rand/pubs/research_reports/RR300/RR392/RAND_RR392.pdf

Credit: NASA/National Additive Manufacturing Innovation Institute
NASA’s Centennial Challenges includes an innovative 3-D Printed Habitat Challenge – a competition that was initiated last May.
NASA and the National Additive Manufacturing Innovation Institute — known as America Makes — are holding a new $2.25 million competition to design and build a 3-D printed habitat for deep space exploration, including the agency’s journey to Mars.
Last week, the top 30 finalists for the Challenge were announced
Construction technology
The multi-phase 3-D Printed Habitat Challenge is designed to advance the additive construction technology needed to create sustainable housing solutions for Earth and beyond.
The top 30 submissions will be judged and a prize purse of $50,000 will be awarded at the 2015 World Maker Faire in New York.
The first phase of the competition runs through Sept. 27, 2015. This phase, a design competition, calls on participants to develop state-of-the-art architectural concepts that take advantage of the unique capabilities 3-D printing offers.
Two levels
The second phase of the competition is divided into two levels.
Level 1: The Structural Member Competition focuses on the fabrication technologies needed to manufacture structural components from a combination of indigenous materials and recyclables, or indigenous materials alone.
Level 2: The On-Site Habitat Competition challenges competitors to fabricate full-scale habitats using indigenous materials or indigenous materials combined with recyclables.
Both levels open for registration Sept. 26, and each carries a $1.1 million prize.
Going native on Mars
Among the winning entries, checkout:
Team LavaHive, a design of LIQUIFER Systems Group of Vienna, Austria. It’s a modular, additive-manufactured Martian habitat design using a proposed novel “lava-casting” construction technique as well as utilizing recycled spacecraft materials and structures.

LavaHive
Nested 3D-Printed Settlement Technology (N3ST) is from Team N.E.S.T. of Chile. Their design is a safe-to-fail design based on the principles of redundancy, simplicity and incrementalism.

Nested 3D-Printed Settlement Technology
Mollusca L5 is the design of LeeLabs of Brooklyn, New York. Their concept proposes a design and methodology for a Mars shell/membrane system to create a protected space for inflated habitation modules and outdoor areas while utilizing 100 percent indigenous materials as the 3D printing substrate.

Mollusca L5
NEO Native is the output from MOA Architecture of Denver, Colorado. In their submission, they say that the 3D printer of the future will be capable of scanning surrounding geology to create an adaptation of local environmental conditions based on thermal and solar requirements, soil characteristics, wind patterns, radiation hazards, and structural foundation requirements.

The NEO NATIVE
Go to an inspiring gallery of all the design finalists at:

Credit: Tyler Skrabek
The artistic talent of Tyler Skrabek has produced the new and informative poster: Spacecraft of the World.
“Spacecraft of the World represents one of my most passionate interests, space exploration, more specifically, the vehicles that aid us in our exploration endeavors,” Skrabek explains.
“With this poster I wanted to explore the actual vehicles that astronauts use to reach out into space,” Skrabek adds. “In addition, this poster explains, through visual means, the differences sections of the spacecraft and shows us the, sometimes, limited spatial volumes space astronauts endure.”

Artist Tyler Skrabek.
Credit: estoica
Skrabek of Calgary, Alberta, Canada is a graduate from the University of Lethbridge with a Bachelors of Fine Arts in New Media.
The artist explains that in 2005 he obtained the first copy of Adobe Photoshop 7 and for some 9 years he has learned the ins and outs of industry tools – specializing in Photoshop, Illustrator, InDesign, Lightroom, and various other graphical softwares. Along with these tools he became proficient in HTML, CSS and WordPress.
Take a look at his space works — including Rockets of the World and Rockets of Human Spaceflight — all available for purchase at:
https://www.etsy.com/ca/listing/243764252/spacecraft-of-the-world?ref=shop_home_active_1

Sequence of Curiosity Mastcam Left images taken on September 10, 2015 Sol 1100.
Credits: Panorama by Leonard David from NASA/JPL-Caltech/MSSS images.
NASA’s Curiosity Mars rover continues to capture striking images of its surroundings.
Curiosity has been working on Mars since early August 2012. It reached the base of Mount Sharp last year after investigating outcrops closer to its landing site and then trekking toward the mountain.

Curiosity Mastcam Left, Sol 1100, taken on September 10, 2015.
Credit: NASA/JPL-Caltech/MSSS
Today is Sol 1102 on Mars for Curiosity.
Over the weekend, mission operators were to make use of the Mars Hand Lens Imager (MAHLI) to take up-close images of the rover’s wheels, and then acquire a full suite of images of a rock dubbed “Badlands.”
Also on tap is to use the Mastcam and Chemistry & Camera (ChemCam) to observe targets named “Madison” and “Jefferson,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
On Sol 1104, the Remote Micro-Imager (RMI) and Mastcam are slated to take images of a bright ridge on the flank of Mt. Sharp.

Curiosity Mastcam Right image taken on Sol 1100, September 9, 2015.
Credit: NASA/JPL-Caltech/MSSS
Arm error
Last last week, the robot encountered an “arm error” while being stowed, Herkenhoff explains. “Apparently the shoulder azimuth motor was too cold, so the rover software halted the stow,” he adds, which precluded a rover drive that was to follow.
“The operations team had to scramble to recover from the arm error and plan science observations, but was able to put together an excellent weekend plan,” Herkenhoff reports.
Curiosity/Mars Odyssey team up
Now on tap, early on Sol 1105, Herkenhoff explains, the rover’s Mastcam and Navcam will observe the Sun and sky soon after NASA’s Mars Odyssey orbiter flies over, “so that orbiter observations can be compared with nearly simultaneous observations from the surface.”
Dates of planned rover activities are also subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Large-scale crossbedding in the sandstone of this ridge on a lower slope of Mars’ Mount Sharp is typical of windblown sand dunes that have petrified. NASA’s Curiosity Mars rover used its Mastcam to capture this vista on Aug. 27, 2015.
Credit: NASA/JPL-Caltech/MSSS
Sand dune deposits
The Jet Propulsion Laboratory has detailed some earlier rover imagery of dark sandstone. The Mars rover photos show texture and inclined bedding structures characteristic of deposits that formed as sand dunes…then were cemented into rock.
“This sandstone outcrop — part of a geological layer that Curiosity’s science team calls the Stimson unit — has a structure called crossbedding on a large scale that the team has interpreted as deposits of sand dunes formed by wind,” JPL explains.

Sets of bedding laminations lie at angles to each other. Such crossbedding is common in wind-deposited sandstone of the U.S. Southwest. An example from Utah is pictured here.
Credit: U.S. Department of the Interior/U.S. Geological Survey
As a comparison, there are look alike petrified sand dunes that are common in the U.S. Southwest.
“Geometry and orientation of the crossbedding give information about the directions of the winds that produced the dunes,” JPL’s Curiosity website adds.

This map shows the route driven by NASA’s Mars rover Curiosity through the 1100 Martian day, or Sol, of the rover’s mission on Mars (September, 10, 2015).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (roughly 0.62 mile).
From Sol 1099 to Sol 1100, Curiosity had driven a straight line distance of about 108.47 feet (33.06 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter (MRO).
Credit: NASA/JPL-Caltech/Univ. of Arizona

Driving robots from space. Landing humans on a distant object is one thing, but they will also need the fuel and equipment to work and return to Earth when done. Sending robots to scout landing sites and prepare habitats for humans is more efficient and safer, especially if the robots are controlled by astronauts who can react and adapt to situations better than computer minds.
Credit: ESA
The International Space Station (ISS) is serving as a test bed platform for controlling robots on Earth.
European Space Agency astronaut Andreas Mogensen took part in ESA’s Meteron project. The effort showcases the ability to operate lunar robots from a spacecraft orbiting the Moon.
A similar technique and technology is expected to prove useful for establishing base camps on Mars prior to human arrival.
Networks, interfaces and hardware
Meteron is developing the communication networks, interfaces and hardware to operate robots from a distance in space.
Mogensen directly controlled the Eurobot rover in a simulated troubleshooting Moon scenario. A second rover was controlled by ESA’s center in Germany, allowing the space traveler to focus on Eurobot and intervene if necessary.

ESA astronaut Andreas Mogensen commanded the Eurobot rover from the International Space Station. As part of ESA’s Meteron project, the space flyer drove the car-sized rover to repair a mockup lunar base in the Netherlands.
Credit: ESA
The demonstration showed that robots can perform valuable tasks and two can collaborate efficiently, even if they are controlled from miles apart.
European leadership
“With two very successful rover operations on Earth controlled from space on two consecutive days, we are looking forward to continuing Europe’s leadership in human-robot cooperation with many more projects,” adds Meteron project coordinator, Philippe Schoonejans.
Go to this informative video on the test at:
http://www.esa.int/spaceinvideos/Videos/2015/09/Andreas_Mogensen_controls_ground_rover_from_space

Curiosity Navcam Right B image taken on Sol 1099 September 9, 2015.
Image Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover has made some impressive images of “Bridger Basin” and has been busy acquiring a large stereo mosaic of the far wall of that Basin.
The rover’s movement on Mars was halted on Sol 1098 after reaching some 43 feet (13 meters) of a planned trek of over 80 feet (25 meters), reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
The start-stop drive occurred because Curiosity could not confirm that the path ahead was safe.
Recent glitch
One recent glitch involves the Mars Reconnaissance Orbiter (MRO).
The last 5 relays of data through MRO have returned “significantly less data” than expected. If this problem continues, Herkenhoff notes, skimpy amounts of data will be available to plan another rover drive on Sol 1100.

Curiosity Mars rover is imaging Bridger Basin.
Credit: NASA/JPL-Caltech
“Fortunately, the MRO team understands the problem and knows how to correct it,” Herkenhoff points out, so there was a good chance that all the data needed would become available for rover planning purposes today.

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on September 7, 2015, Sol 1097.
Credit: NASA/JPL-Caltech/MSSS
Dates of future planned rover activities are always subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

The subjects must strictly adhere to the bedrest – one shoulder must remain on the mattress at all times.
Credit: DLR (CC-BY 3.0).
A German research facility is home for a bedrest study – an effort to learn how to minimize the negative effects of microgravity on their bodies.
The German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt (DLR) “:envihab” research facility is set to evaluate a dozen men, aged 20 to 45 years old. The study is being carried out by DLR on behalf of the European Space Agency (ESA).
Their beds will be tilted at an angle of six degrees below the horizontal. Doing so results in their bodily fluids shifting towards the upper body. Bones and muscles in their lower part of their bodies lose strength as a result of the lack of movement.
The intention of the study is to investigate, among other things, whether exercise could serve as more suitable countermeasures to microgravity. Subjects will be confined to bedrest for two months with two weeks of experimental investigations and tests.
Active look at inactivity
The test subjects in the group will be training five or six times per week primarily by making small, powerful jumps in a horizontal position – ‘reactive jumps’.
“A short course of training with strong muscular focus…there has never been anything of this kind in space before,” explains Edwin Mulder, leader of the study and a scientist at the DLR Institute of Aerospace Medicine in a press statement.
Roughly 90 experiments will be carried out, in addition to studying the effects of inactivity on bones and muscles during the two months spent in bed.
Also on tap for study are changes to the cardiovascular system, sense of balance, the eyes, thermo-regulation, as well as the autonomic nervous system.

The DLR Institute of Aerospace Medicine.
Credit: DLR
Follow-up exams
The test subjects will undergo regular examinations and tests. All test subjects will be examined and tested for an additional two weeks following their time in bedrest.
After their stay in envihab, the test subjects will participate in five follow-up examinations over the next two years.
The DLR Institute of Aerospace Medicine is a one-of-a-kind, highly sophisticated medical research facility in Cologne. A one-story, 3500-square-meter, state-of-the-art space, :envihab (from the words “Environment” and “Habitat”) is used to explore the effects of extreme environmental conditions on humans and to determine possible countermeasures.

Credit: SASTIND

After releasing a test return capsule to Earth, the solar-powered service module first loitered at Earth-Moon L2 and then moved into orbit around the Moon.
Credit: CCTV/China Space Website
Chinese space officials have released new images of the Moon – apparently focused on the landing site of that country’s future Chang’e 5 lunar lander.
Target date for China’s ambitious robotic Moon probe mission is in 2017.
Chang’e 5 is slated to soft land on the moon, snag surface specimens, fly them into lunar orbit, then rocket those samples back to Earth.
Circumlunar mission
In a statement by the State Administration of Science, Technology and Industry for National Defense (SASTIND), the pictures have a resolution of roughly 3 feet (one meter).
The images were taken by China’s orbiting service module that was sent circling the Moon after a visit to the Earth-Moon Lagrangian L2 position last year.

Pre-launch photo shows China’s experimental craft that completed a circumlunar flight last year. Capsule evaluated technologies for a robotic lunar sample return effort slated for 2017 liftoff.
Credit: CASC/China Space
That service module was boosted on a Long March 3C rocket from China on October 24, 2014. It was part of China’s circumlunar mission that also saw flight of an experimental capsule – often called the Chang’ e 5-T1 test mission – that made a fiery, skip re-entry and parachute landing back to Earth. The capsule was recovered in Siziwangqi in Inner Mongolia of China on November 1, 2014.
Shakeout voyage
The long looping roundtrip between Earth and the Moon, then having the service module park itself in lunar orbit, mimics a variety of shakeout actions to be taken by the Chang’e 5 robotic lunar exploration project.
SASTIND noted that the current service module circuiting the Moon is in good condition and will carry out further scientific experiments to study the lunar gravity field.
For an interesting video that depicts China’s Chang’e 5 mission, go to:
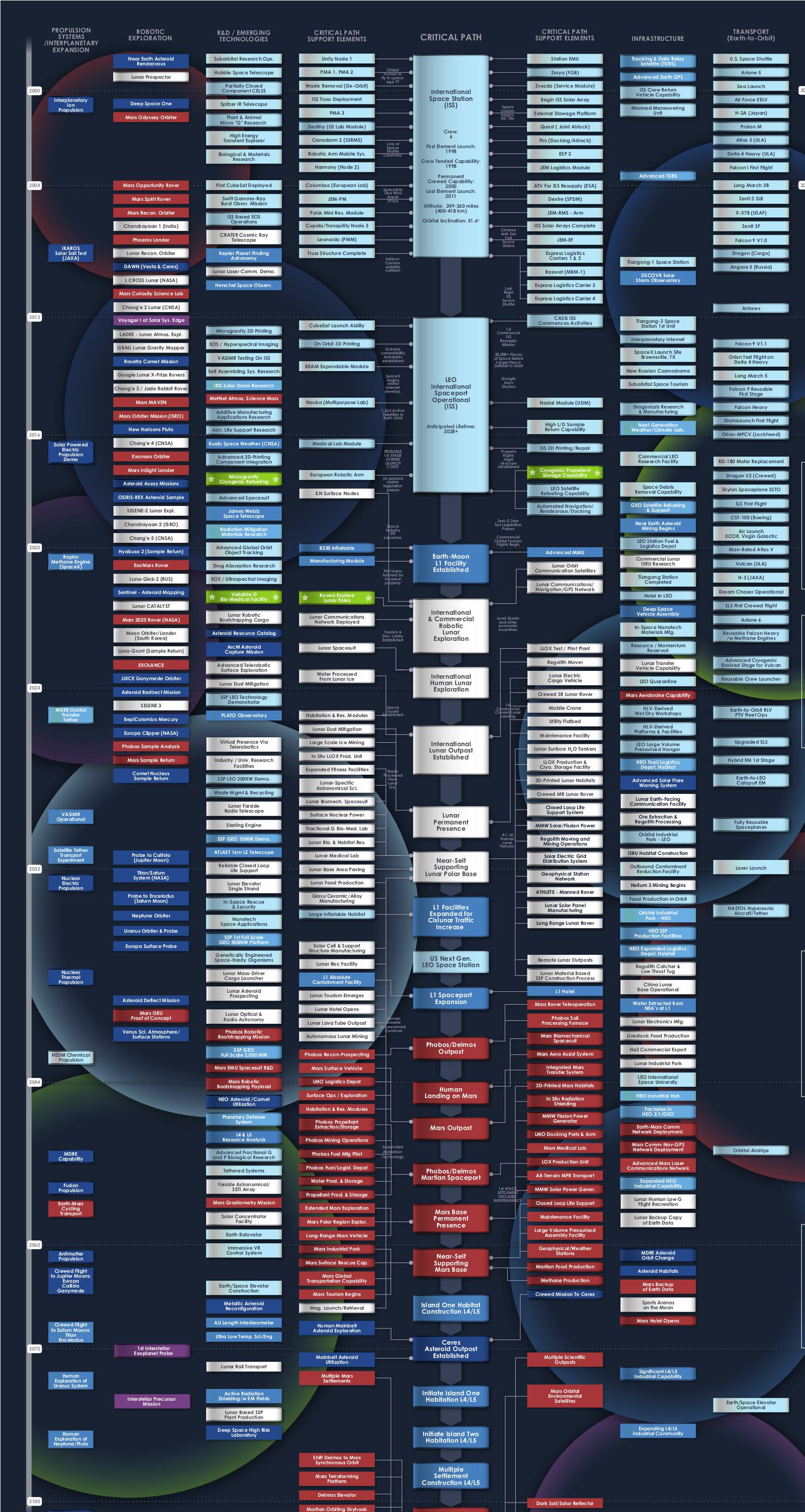
Credit: Integrated Space Analytics
Here’s a way to take part in shaping humankind’s up and going trajectory into space. And to do so, everyone needs a plan and some guideposts on which you can hang your space helmet.
The Integrated Space Plan – an evolutionary matrix of capabilities — is billed as “the most comprehensive vision of the next 100 years of space development ever produced” – compiled into a single graphic.
Space history 101
In the late 1980s, Ron Jones – then working for Rockwell International – created the first Integrated Space Plan (ISP), a visual representation showing how major space infrastructure elements fit together.
Now a founding team member at Integrated Space Analytics, Jones continues to draw upon his architectural aplomb as an aerospace professional with 25 years of experience primarily at NASA, Martin Marietta, Rockwell, and Boeing.
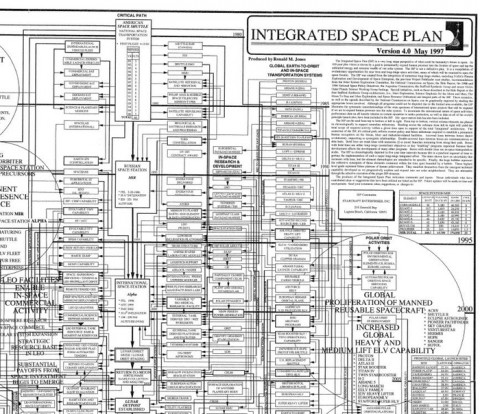
Excerpt of past 4.0 space future, circa 1997.
Credit: Integrated Space Analytics
Integrated Space Analytics was created by the Space Finance Group (SFG) in 2014. Members of SFG believed in the importance of the original Integrated Space Plan as a vehicle for teaching people about space.
A successful Kickstarter project campaign last summer made possible the funding of a new edition of the Plan. At present, work is progressing on developing a website that is an active and growing information resource for space professionals and others.
Guideposts up ahead!
The Integrated Space Plan is better described as a set of guideposts for things that will be needed, rather than a flowchart. The ISP is available in full-color poster format, but is also available for the first time through an interactive website.
Indeed, thanks to the Internet, a specially created website offers the Integrated Space Plan 2015, an edition that includes blocks linked to a page about the topic of the block.
“We encourage ideas and feedback from the global aerospace community as we begin to apply crowdsourcing techniques to human expansion into space,” notes Gary Bickford, Chief Technical Officer of Integrated Space Analytics (ISA).
“Over the next year, ISA will continue the Integrated Space Plan’s development with emphasis on Earth-Moon transportation architecture and lunar base definition needs,” Jones explains, “where the private sector is likely to play an evolving role.”
Adds Steven Jorgenson, Chief Financial Officer and Venture Capital advisor of ISA: “One of our objectives is to offer the private sector insights into areas of future participation in space development.”
For more information on the Integrated Space Plan, go to:

Artist’s concept of the Hedgehog robot, able to function regardless of which side lands up.
Credit: NASA/JPL-Caltech/Stanford
Rolling and tumbling on another world sounds like a bad and busting idea.
But a robot concept called Hedgehog could explore the microgravity environment of comets and asteroids by hopping and rolling around on them.
While a Mars rover can’t operate upside down, its wheels in the air, the Hedgehog robot can function regardless of which side lands up.
The project is being jointly developed by researchers at NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, California; Stanford University in Stanford, California; and the Massachusetts Institute of Technology in Cambridge.
Spikes and flywheels
The JPL Hedgehog prototype has eight spikes and three flywheels. It weighs about 11 pounds (5 kilograms) by itself, but the researchers envision that it could weigh more than 20 pounds (9 kilograms) with instruments such as cameras and spectrometers.
The Stanford prototype is slightly smaller and lighter, and it has shorter spikes.
Both prototypes maneuver by spinning and stopping three internal flywheels using motors and brakes. The braking mechanisms differ between the two prototypes. JPL’s version uses disc brakes, and Stanford’s prototype uses friction belts to stop the flywheels abruptly.
Spreading out for discovery
Researchers are currently working on Hedgehog’s autonomy, trying to increase how much the robots can do by themselves without instructions from Earth.
Their idea is that an orbiting mothership would relay signals to and from the robot, similar to how NASA’s Mars rovers Curiosity and Opportunity communicate via satellites orbiting Mars. The mothership would also help the robots navigate and determine their positions.
A Hedgehog robot is relatively low-cost compared to a traditional rover, and several could be packaged together for flight.
The mothership could release many robots at once or in stages, letting them spread out to make discoveries on a world never traversed before.
Hedgehog is currently in Phase II development through the NASA Innovative Advanced Concepts (NIAC) Program.
Take a look at this new video on Hedgehog and its development by going to:

