Archive for August, 2015

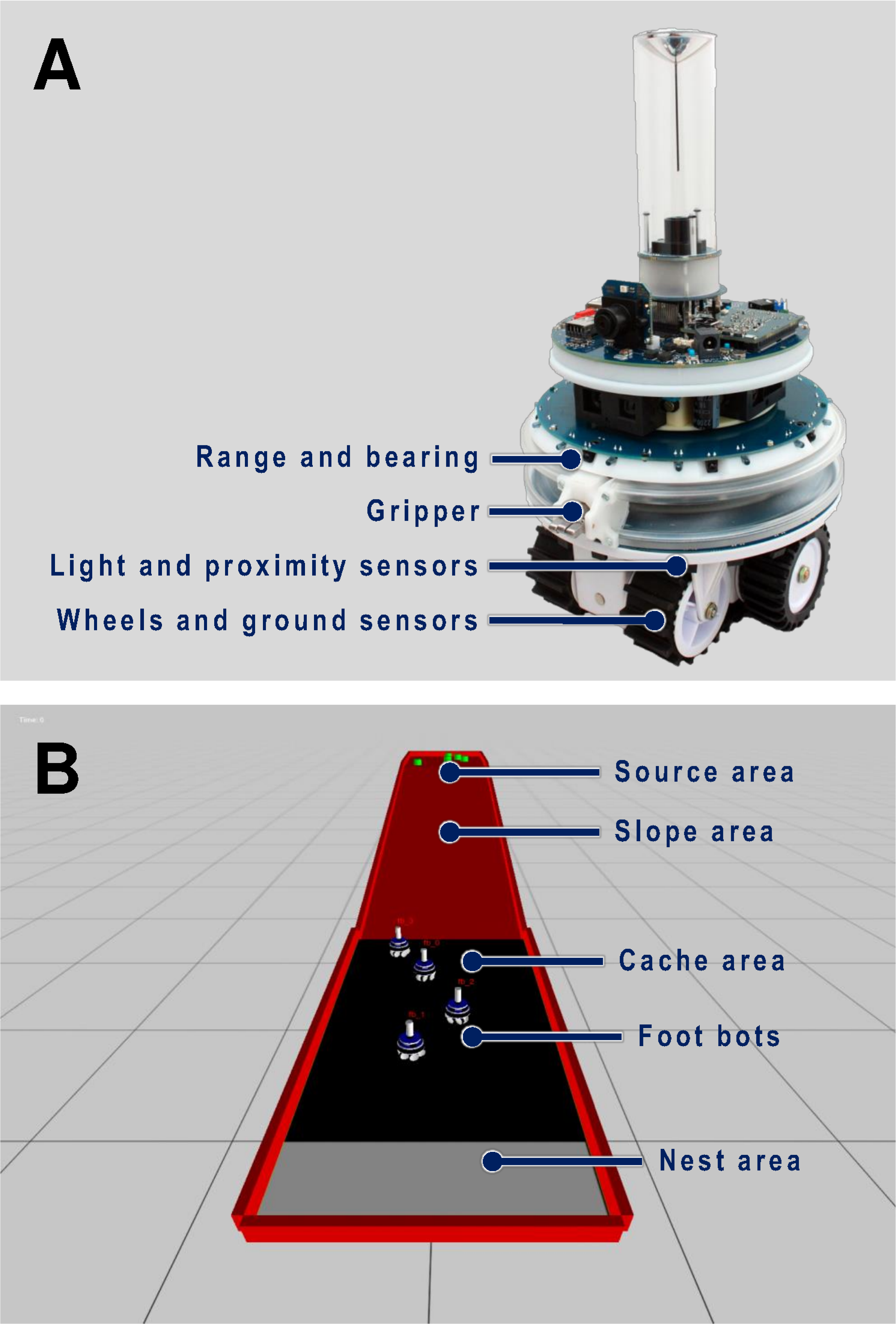
Robot swarm can carry out self-organizing exploration tasks.
Credit: Ferrante et al.
Given the wide variety of scientific zones of interest on the Moon, Mars and other worlds, future use of “robot swarms” may carve up exploration duties.
Work by a research team has been captured in a recently published paper: “Evolution of Self-Organized Task Specialization in Robot Swarms.”
Division of labor is ever-present in biological systems, the researchers point out, as evidenced by various forms of complex task specialization seen in both animal societies and multi-cellular organisms.
Recently, evolutionary swarm robotics has emerged as a test bed to study the evolution of coordinated group-level behavior, the team observes.
The work has been led by Eliseo Ferrante, Edgar Duéñez-Guzmán, Tom Wenseleers at the Laboratory of Socio-Ecology and Social Evolution, Zoological Institute, KU Leuven, Leuven, Belgium. Additional researchers are Ali Emre Turgut of the Mechanical Engineering Department, Middle East Technical University, Ankara, Turkey and Marco Dorigo of IRIDIA–CoDE, Université Libre de Bruxelles, Brussels, Belgium.
Task partitioning
The investigative team reports that, for the first time, they have studied the evolutionary origin of behavioral task specialization among groups of identical robots. The scenario investigated involves an advanced form of division of labor, common in insect societies and known as “task partitioning,” whereby two sets of tasks have to be carried out in sequence by different individuals.
“One of the unsolved mysteries in biology is how a blind process of Darwinian selection could have led to such highly complex forms of sociality,” they explain in the research paper published by PLOS — Public Library of Science — a nonprofit publisher and advocate of open access research.
Credit: Ferrante et al.
Inspired by ants
Their experimental setup was inspired by the type of task partitioning observed in Atta leafcutter ants that collect leaves and other plant material as a substrate for a fungus that is farmed as food.
In a first set of experiments, “dropper,” “collector,” and “generalist” foraging strategies were implemented:
— Dropper strategy: A dropper robot is a robot that climbs the slope area and never descends it again, continuously collecting items from the source area and dropping them to the slope area.
— Collector strategy: A collector robot is a robot that never climbs the slope area. Instead, it continuously collects items from the cache (when present) and brings them back to the nest. If it cannot find any items, the collector robot keeps exploring the cache area by performing random walk, until an item is found.
— Generalist strategy: A generalist robot is a robot that performs a standard foraging task. It climbs the slope and explores the source area, collects items, and brings them all the way back to the nest. The generalist robot does not explore the cache area, but in case it finds an item at the cache while going towards the source, it collects it and brings it back to the nest.
Note: Ferrante tells Inside Outer Space: “In the second set of experiments, it was shown that those strategies (above) do not need to be available a priori in order to evolve task specialization. In fact, this has been the first time that both task allocation and the capability to carry out the individual tasks evolved together.”
Teams of robots
From an engineering perspective, Ferrante and colleagues report, “our nature-inspired evolutionary method of Grammatical Evolution clearly has significant potential as a method for the automated design of adaptively behaving teams of robots.”
For more information on this research, go to:
http://journals.plos.org/ploscompbiol/article?id=10.1371/journal.pcbi.1004273
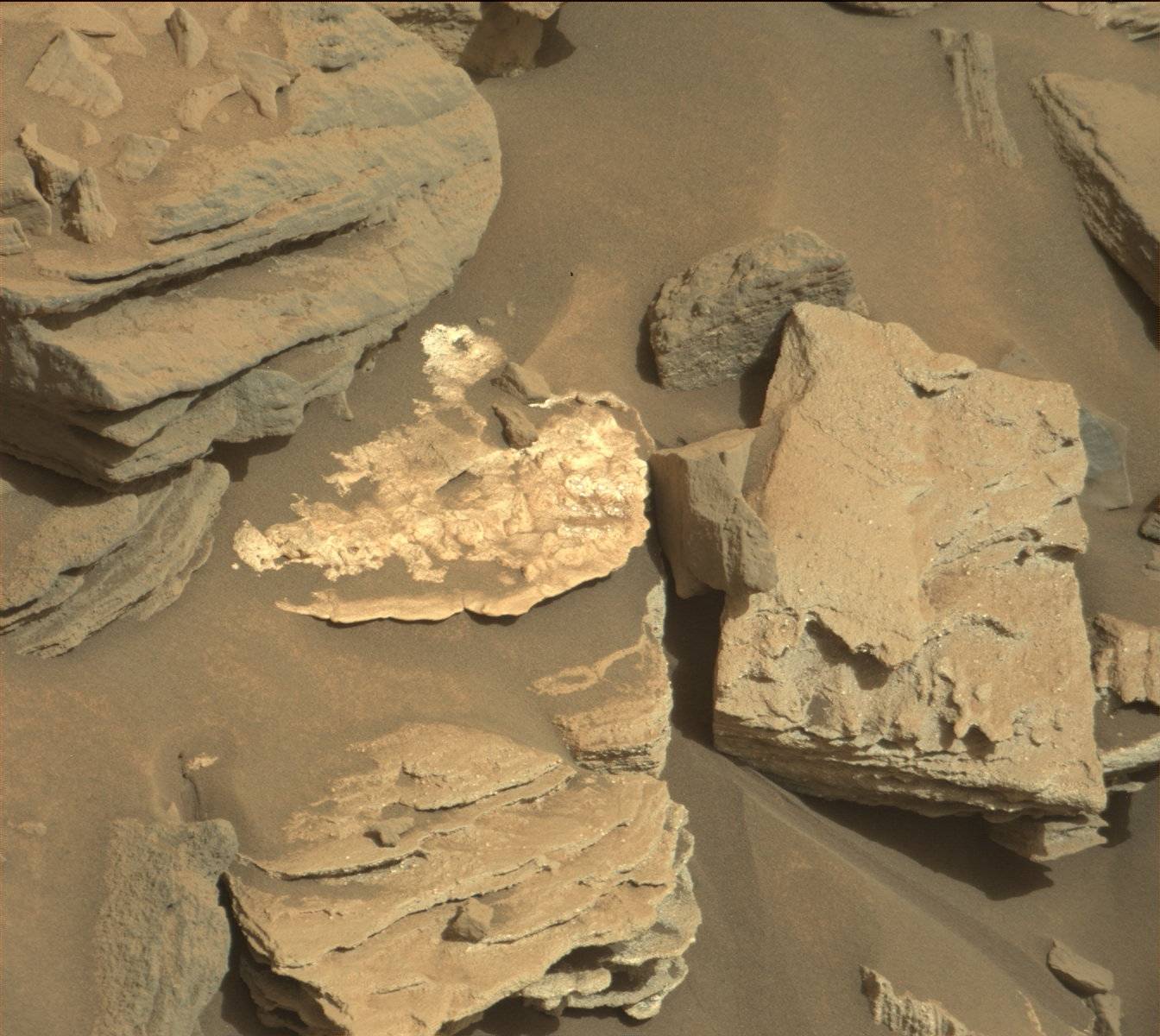
Mastcam Right image on Sol 1064 on August 4, 2015.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover has reached its third anniversary of landing in Gale crater.
“It’s been a great three years, full of a number of important science discoveries,” observes Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona and a member of the Mars Science Lab’s science team.
Edgar said that to celebrate the rover’s start of its 4th year on Mars, Curiosity is driving away from the Lion outcrop, and back toward the Missoula outcrop.
“I feel like Curiosity has really grown up in these past couple of years, and she’s acting like a true field geologist – quickly interpreting key science data, and revisiting sites that will improve our understanding of the geologic history here,” Edgar explained in a website posting.

Mastcam Right image on Sol 1064 on August 4, 2015.
Credit: NASA/JPL-Caltech/MSSS
Dump pile
The plan called for Curiosity to make a couple of final observations at Lion before driving away and acquire ChemCam and Mastcam images of the target “Moiese” to look for chemical variations across the outcrop.
Time has been taken to acquire images of a “pre-sieve” dump pile. Pre-sieve refers to the sample material that didn’t make it through the sieve, in other words, the larger size fraction.
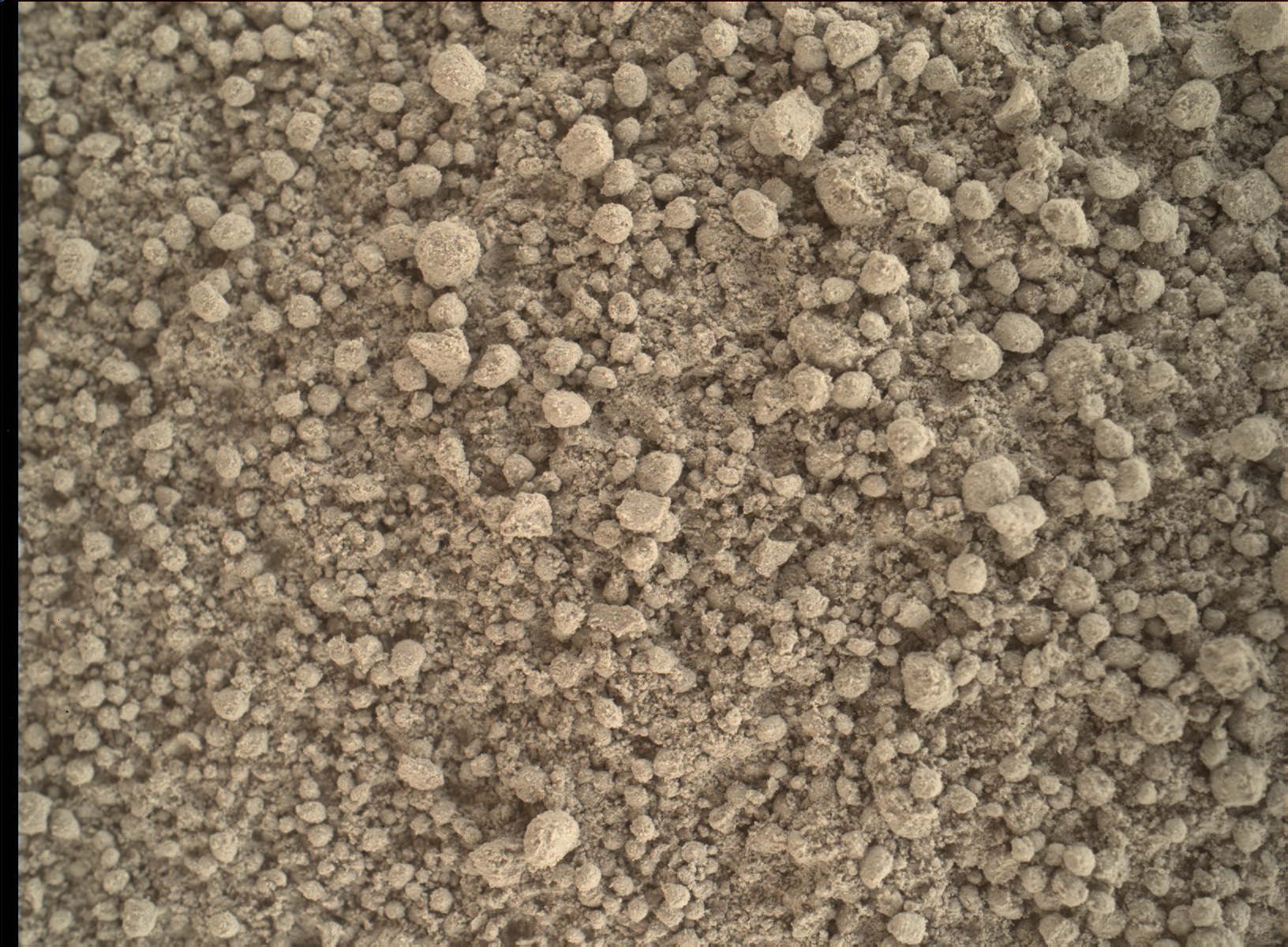
Image from Curiosity’s Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, taken on August 5, 2015, Sol 1065.
Credit: NASA/JPL-Caltech/MSSS
“By dumping it on the ground we can see what the larger size particles look like and whether they have a composition that varies from that of the full mix of particle sizes,” Edgar adds.
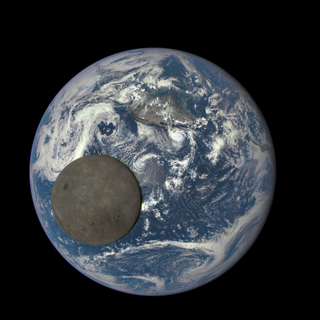
Credits: NASA/NOAA
A NASA camera — the Earth Polychromatic Imaging Camera (EPIC) — aboard the Deep Space Climate Observatory (DSCOVR) satellite has captured a unique view of the Moon as it moved in front of the sunlit side of Earth last month.
The series of test images shows the fully illuminated “dark side” of the moon that is never visible from Earth.
These images were taken between 3:50 p.m. and 8:45 p.m. EDT on July 16, showing the moon moving over the Pacific Ocean near North America.
The Earth’s North Pole is in the upper left corner of the image, reflecting the orbital tilt of Earth from the vantage point of the spacecraft.
The same side of the moon always faces an earthbound observer because the moon is tidally locked to Earth. That means its orbital period is the same as its rotation around its axis.
An animation features actual satellite images of the far side of the moon, illuminated by the sun, as it crosses between the DSCOVR spacecraft’s Earth Polychromatic Imaging Camera (EPIC) and telescope, and the Earth – one million miles away.
Check out this YouTube video:
https://www.youtube.com/watch?v=DMdhQsHbWTs
Also, for more detail on this celestial photo-shoot, go to:

Credit: Indie Galactic Space Jam
Indie Galactic Space Jam is going to be held on August 13th-16th in Florida.
Thursday’s opening is being held at the Orlando Science Center, and Friday through Sunday is at the Melrose Center.
“Our goal is to bring together people from various creative and technical fields to develop fun games that generate excitement among the public about space travel and exploration,” explains the Indie Galactic Space Jam website.
The games that are produced are geared to help promote interest in Science, Technology, Education and Math (STEM) education to the generations that will carry these concepts into the future.
Everyone is welcome to pitch their game ideas to the group. The best ideas will be used to make space games.
“Developing games in 48 hours is hard, exhausting, and laborious work that is also collaborative, thought provoking, exciting, rewarding, and fun,” note organizers of the Indie Galactic Space Jam.
Programmers, game designers, artists, musicians…all are welcome to take part.
“We’re looking for artists, programmers, game designers, UI & UX designers, sound designers, writers, poets, interpretive dancers, people excited about games, people excited about space, people who like to eat pizza, and people like you.”
For more information, go to:
http://indiegalacticspacejam.com/
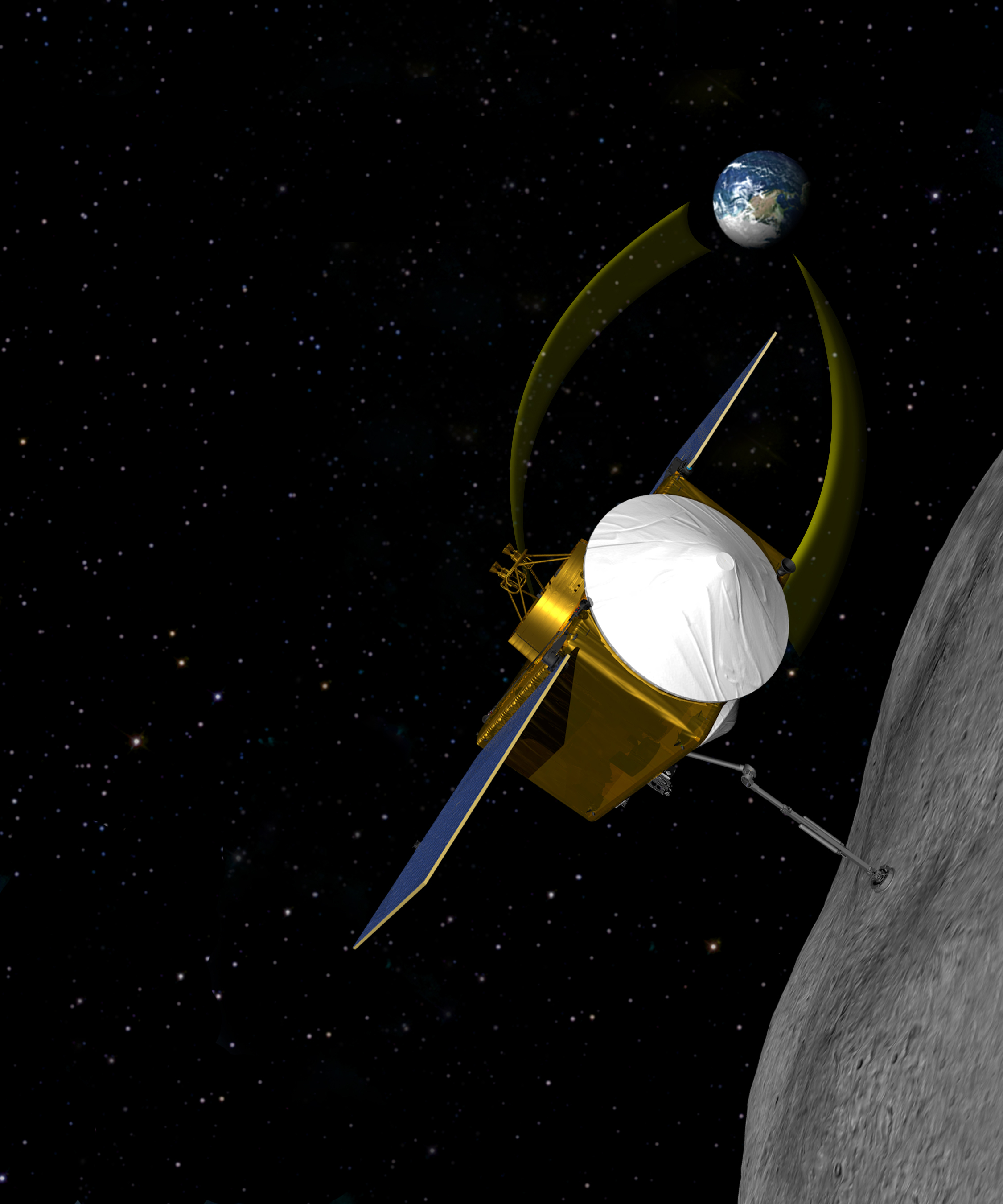
NASA Asteroid-Sampling Mission Readied for 2016 Launch.
Credit: NASA
An asteroid mission is undergoing final checkout for next year’s liftoff that kick-starts a 7-year roundtrip trek to become the first U.S. mission to haul back to Earth samples of a space rock.

Jim Harris, Lockheed Martin Space Systems mechanical engineer holding the OSIRIS-REx Touch and Go Sample Acquisition Mechanism (TAGSAM).
Credit: Lockheed Martin
NASA’s Origins-Spectral Interpretation-Resource Identification-Security-Regolith Explorer, or OSIRIS-REx, is progressing through Assembly, Test, and Launch Operations (ATLO) at Lockheed Martin’s Space Systems Company.
To read my new Space.com story: NASA Asteroid-Sampling Mission Being Readied for 2016 Launch
Go to:
http://www.space.com/30144-nasa-asteroid-sampling-mission-osiris-rex.html

Image taken by Curiosity’s Navcam: Left B Sol 1061, August 1, 2015.
Image Credit: NASA/JPL-Caltech
Operators of the NASA Curiosity rover on Mars are pleased to report that drilling into “Buckskin” was successful.
Over the weekend, the plan called for more robotic arm activities, including transferring the sample to the scoop for inspection.
But first, the ChemCam remote micro-imager (RMI) has taken pictures of the new drill hole and Mastcam will image a potential location for eventually dumping the sample, reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.

This image was taken by Mastcam: Right onboard NASA’s Mars rover Curiosity on Sol 1060, July 31, 2015.
Image Credit: NASA/JPL-Caltech/MSSS
Mineralogical analysis
Herkenhoff adds that the newly acquired sample will be sieved and a portion of the fine-grained material dropped into CheMin for mineralogical analysis overnight on Sols 1061-1062.
The Chemistry and Mineralogy instrument — or CheMin for short – can identify and measure the abundances of various minerals on Mars.

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the Curiosity rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
In parallel, the Alpha Particle X-Ray Spectrometer (APXS) is to analyze and measure the potential sample dump location for comparison with future measurements of the dump pile.
Lastly, during the afternoon of Sol 1062, the rover’s robotic arm was to be moved out of the way so that Mastcam and ChemCam can observe the drill hole and tailings, as well as new targets “Diamond Point” and “Summer Hill,” Herkenhoff explains.
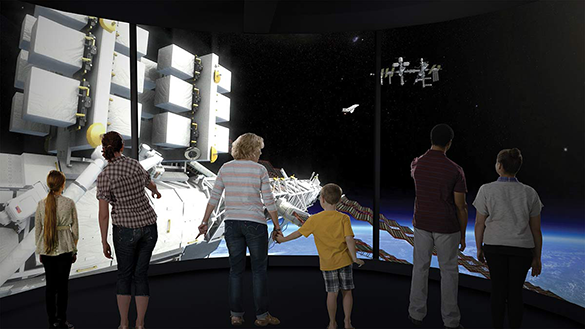
Credit: Evergreen Exhibitions
The space elevator, travel to Mars, futuristic spacecraft propulsion systems.
If you want to travel “above and beyond” you’ll be interested in a new interactive flight exhibition – one that just launched on a multi-city tour to major science centers and air-and-space museums worldwide.
Explored through five key themes that define flight and space travel – Up, Faster, Higher, Farther, and Smarter – Above and Beyond is the name of an education-based exhibition.
The unique exhibit made its worldwide debut in Washington, D.C. at Smithsonian’s National Air and Space Museum on August 1.
Space themes
Among the themes included in the unique exhibit:
— International Space Elevator
Ascend to Earth orbit aboard a simulated space elevator of the future. During your ascent, breathtaking scenery, digital displays and a virtual tour guide describe the aircraft, spacecraft and aerospace phenomena.
— Marathon to Mars
Are you ready to go to Mars? This Augmented Reality experience invites you to take on the physical and psychological challenges of the marathon journey, and lets you “try on” some potential solutions. You can even earn your own personal “Passport to Mars.”
— Future Spacecraft
Touch screen media and images of futuristic spacecraft propulsion systems give you a sneak peek at some exciting innovations designed to open up the space frontier to everyone and propel human astronauts farther than ever before.
— The Light Stuff
In an interactive hammer strength test and a weight comparison of fuselage sections, test and observe how lightweight composite materials—10 times stronger than steel—are helping aircraft and spacecraft fly farther with less fuel.
— Space Junk
Step up to a “Junker” station for a cosmic crusade against debris in space. In this virtual timed challenge, try to eliminate orbital debris surrounding Earth, using your choice of cutting-edge solutions.
Multi-city tour
Above and Beyond is designed to be the most interactive exhibition on aerospace ever to tour, with approximately 5,000 square feet of exhibition space, including a 180-degree immersive theater presentation, a high-tech media-rich historical timeline, a simulated space elevator ride, a challenge to design and test a supersonic fighter jet in a virtual high-speed flying competition, and an avatar-based motion-capture group experience that demonstrates flight like a bird.
The exhibit’s international multi-city tour will run through 2020
Following its premier at Smithsonian’s National Air and Space Museum, the 2015-2016 Above and Beyond tour schedule will include Dubai, St. Louis, Charleston, South Carolina, Riyadh, Seattle, London, Tokyo and Chicago.
Above and Beyond is produced by Evergreen Exhibitions in association with Boeing and in collaboration with NASA and the Smithsonian’s National Air and Space Museum.
For more information, go to:

