Archive for August, 2015

Credit: ESA
Europe is ratcheting up the strategic significance of the Moon in a global space exploration endeavor.
For example, in the European Space Agency’s (ESA) Space Exploration Strategy it spells out the mission theme of “sustainable exploration of the Moon is integrated in the strategic exploration approach for Europe.”
A guiding principle in Europe is to implement exploration missions with humans and robots in a coordinated manner.
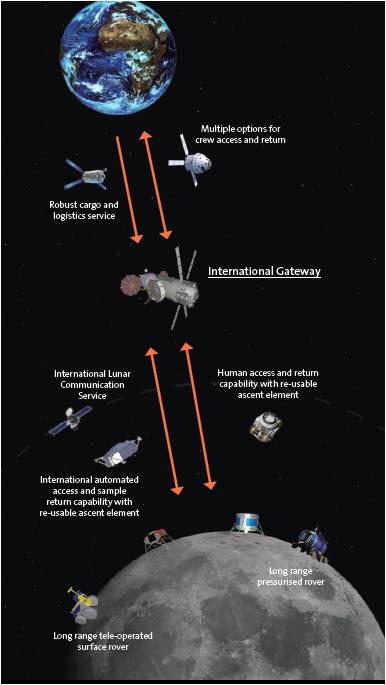
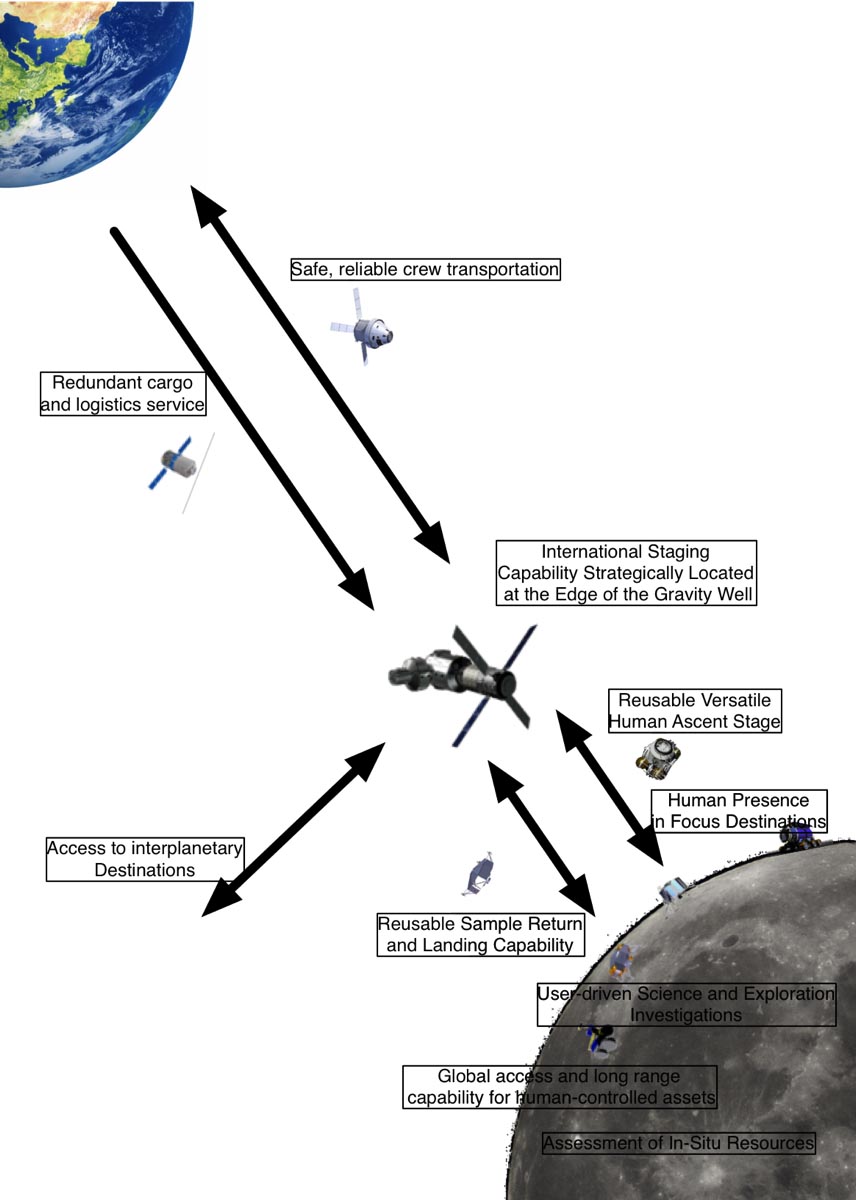
Key to realizing the Lunar Exploration Vision 2030 is the step-wise deployment of international exploration architecture. This vision envisages access for robots and humans to previously unexplored regions.
International vision
The ESA exploration strategy considers the Moon as the next destination for humans venturing beyond low Earth orbit and an integral element of the roadmap towards humans missions to Mars.
Credit: ESA
“The international vision for lunar exploration calls for a new era of coordinated human and robotic missions enabled by broad international cooperation,” explains former astronaut, Thomas Reiter, ESA Director of Human Spaceflight and Operations.
Reiter notes that the ISS program has demonstrated the importance of a robust international partnership for the station’s development, assembly, operations and effective utilization.
“Now is the time to build on this partnership and open it to new partners to continue the journey beyond low Earth orbit,” Reiter says.
Investments
There are investments by governments and private stakeholders in space exploration, such as:
— In Europe the program of Life and Physical Science in Space (ELIPS) helps understanding how humans can live and work in space.
— A Russian-lead Luna program that takes the next steps in automated exploration of the lunar surface.
— ESA already contributes to the critical path of human transpiration beyond low Earth orbit by providing the service module to the US-lead Orion vehicle.
Credit: ESA
Sustainable and affordable framework
“This is the time to formulate a concrete vision of how to explore the Moon in the next decade in a sustainable and affordable framework,” explains an ESA brochure for an upcoming ESA-led symposium titled: International Symposium on MOON 2020-2030 – A New Era of Coordinated Human and Robotic Exploration.
The symposium will feature technical sessions addressing the strategies and challenges of human robotic cooperation on the Moon.
The meeting is to be held December 15-16 at ESA/ESTEC in Noordwijk, The Netherlands.
For more information, go to:

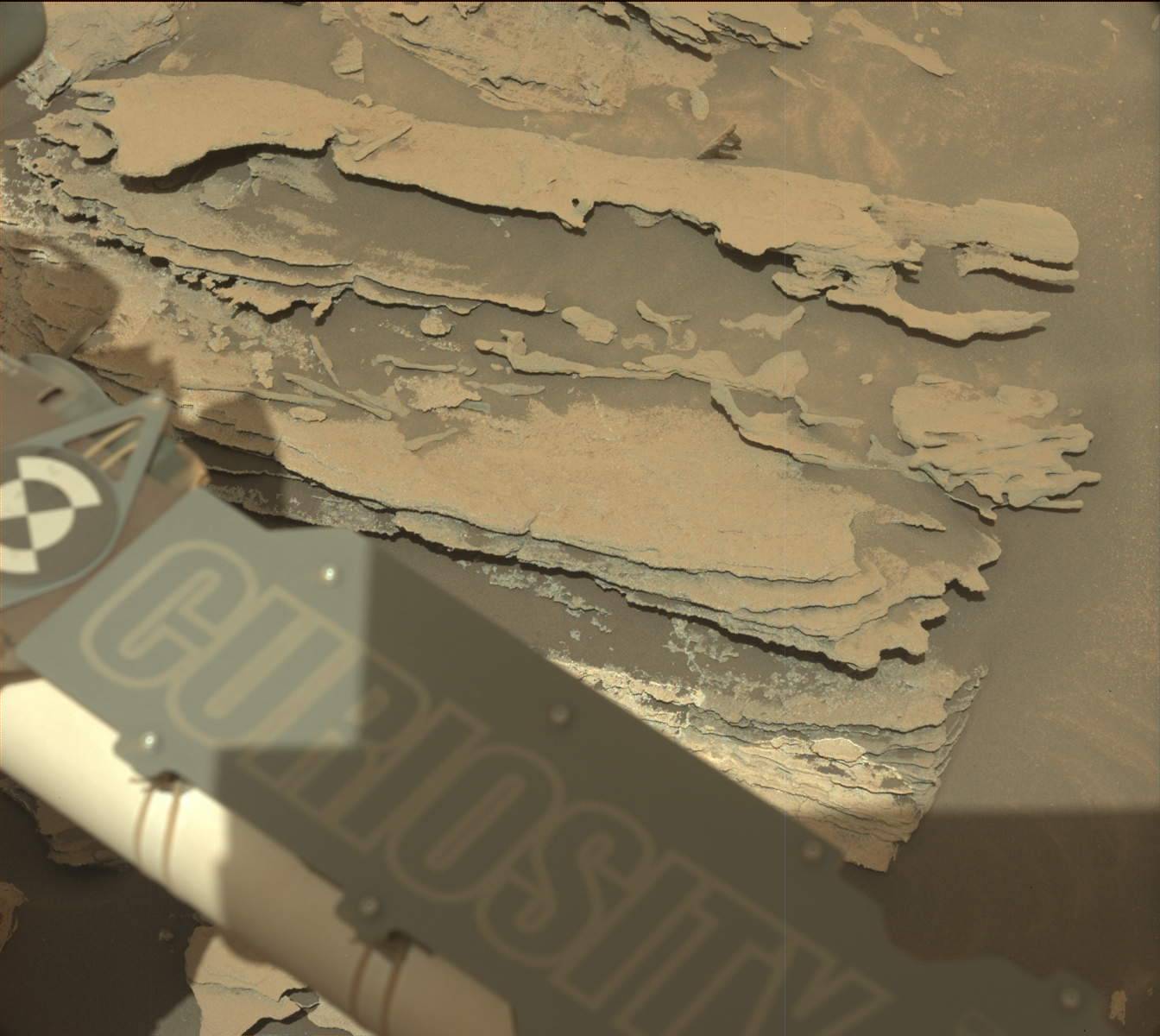
Curiosity Mastcam Left image taken on August 25, 2015, Sol 1085.
Credit: NASA/JPL-Caltech/MSSS
“Curiosity is currently making her way through some beautiful exposures of the Stimson unit,” reports Lauren Edgar of the USGS Astrogeology Science Center in Flagstaff, Arizona.
The rover completed a roughly 20-foot (6-meter) drive on Sol 1087 and Curiosity is in a good position for possible contact science early next week, Edgar adds.
Weekend work for the robot is that on Sol 1089 Curiosity is to drop off part of the Buckskin drill sample to the Sample Analysis at Mars (SAM) Instrument Suite.
The plan calls for dumping the Buckskin post-sieve sample, and analyze it with the Alpha Particle X-Ray Spectrometer (APXS).
Bedrock features
The schedule also includes Mastcam and Mars Hand Lens Imager (MAHLI) imaging to document the dump pile, Edgar adds. “Sol 1090 consists of several ChemCam observations of the targets “Fox Hills,” “OBriens Creek,” and “Bearpaw” to investigate the bedrock and local alteration features.”
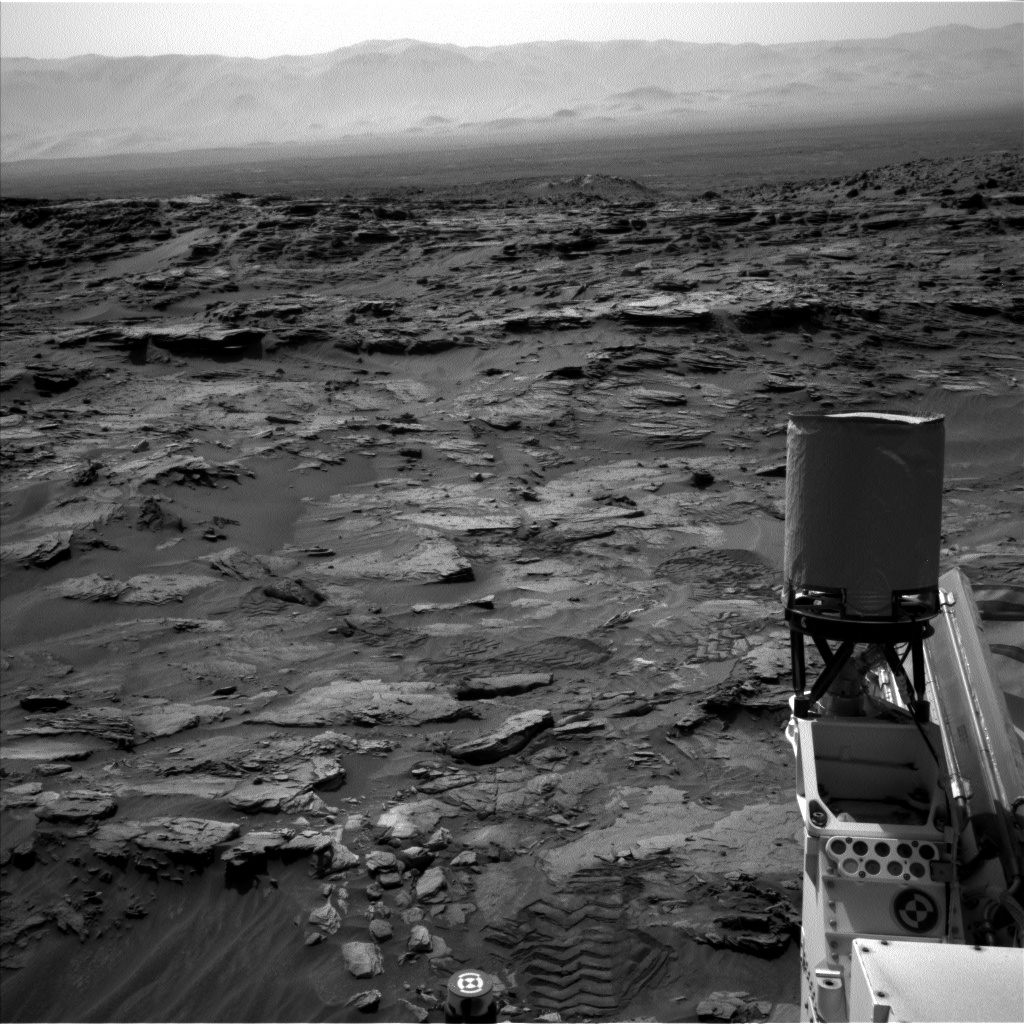
Curiosity Mastcam Left image taken on Sol 1087, August 28, 2015.
Credit: NASA/JPL-Caltech/MSSS
Also on tap is to acquire a large Mastcam mosaic to document the stratigraphy, and a Navcam deck pan for dust monitoring.
“This region has some particularly stunning views,” Edgar notes, “so I’m looking forward to seeing the new mosaics!”
Note: Dates of planned rover activities are always subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Credit: Planetary Resources, Inc.
Planetary Resources, the asteroid mining company, has developed an informative list of several interesting and valuable near-Earth asteroid prospecting and mining targets in the Solar System.
According to the group, many of these targets are valued in the trillions of dollars.
How they go about selecting the targets – and the technology they are developing to expand that list is contained in their latest blog post.
Space drones
For one, at the group’s spacecraft factory in Redmond, Washington, Arkyd rendezvous prospectors are being built. These “space drones” are highly capable, low cost spacecraft that will be equipped with hyperspectral and infrared sensors.
These drones would swarm prospective targets and collect information on the composition of the asteroid, analyze that information on the spot, and send back that data to a team of experts at Planetary Resources.
Already in Earth orbit, the firm’s Arkyd 3R — deployed from the International Space Station (ISS) last July — that satellite is testing several underlying technologies headed for the Arkyd spacecraft.
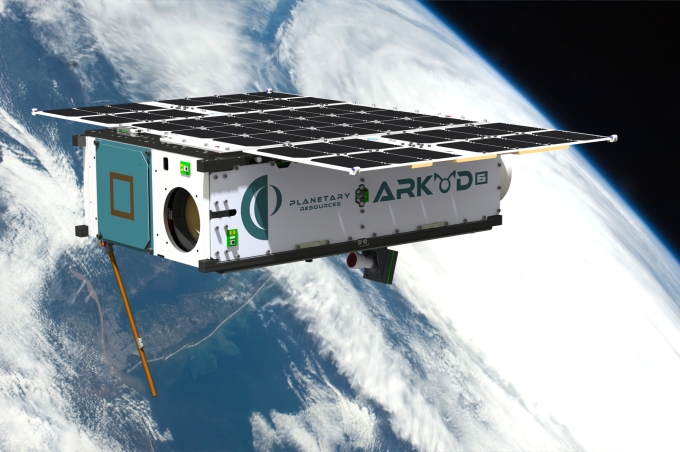
Arkyd 6, launching later this year.
Credit: Planetary Resources, Inc.
Slated for launch later this year, the Arkyd 6 (A6) is a slightly larger spacecraft that will carry the organization’s first infrared imaging sensor that can be utilized to identify water resources on asteroids.
Target list
“In the process of gathering additional data through our prospecting mission, we can begin to define the mission profile for extraction, and determine the final scope, cost, difficulty, and feasibility of the mission,” explains Caitlin O’Keefe, Director of Marketing at Planetary Resources, Inc.
“As we continue to gain more intelligence on the near-Earth asteroids and develop our prospecting technologies,” O’Keefe adds, “we will undoubtedly add even more exciting targets to our already growing list.”
To review a table and other information that explains the specific differences when considering a “good” target and a “non-ideal” target near-Earth asteroid, go to these edifying locations:
http://www.planetaryresources.com/2015/08/how-we-choose-our-asteroid-targets/
http://www.planetaryresources.com/asteroids/#asteroids-targets

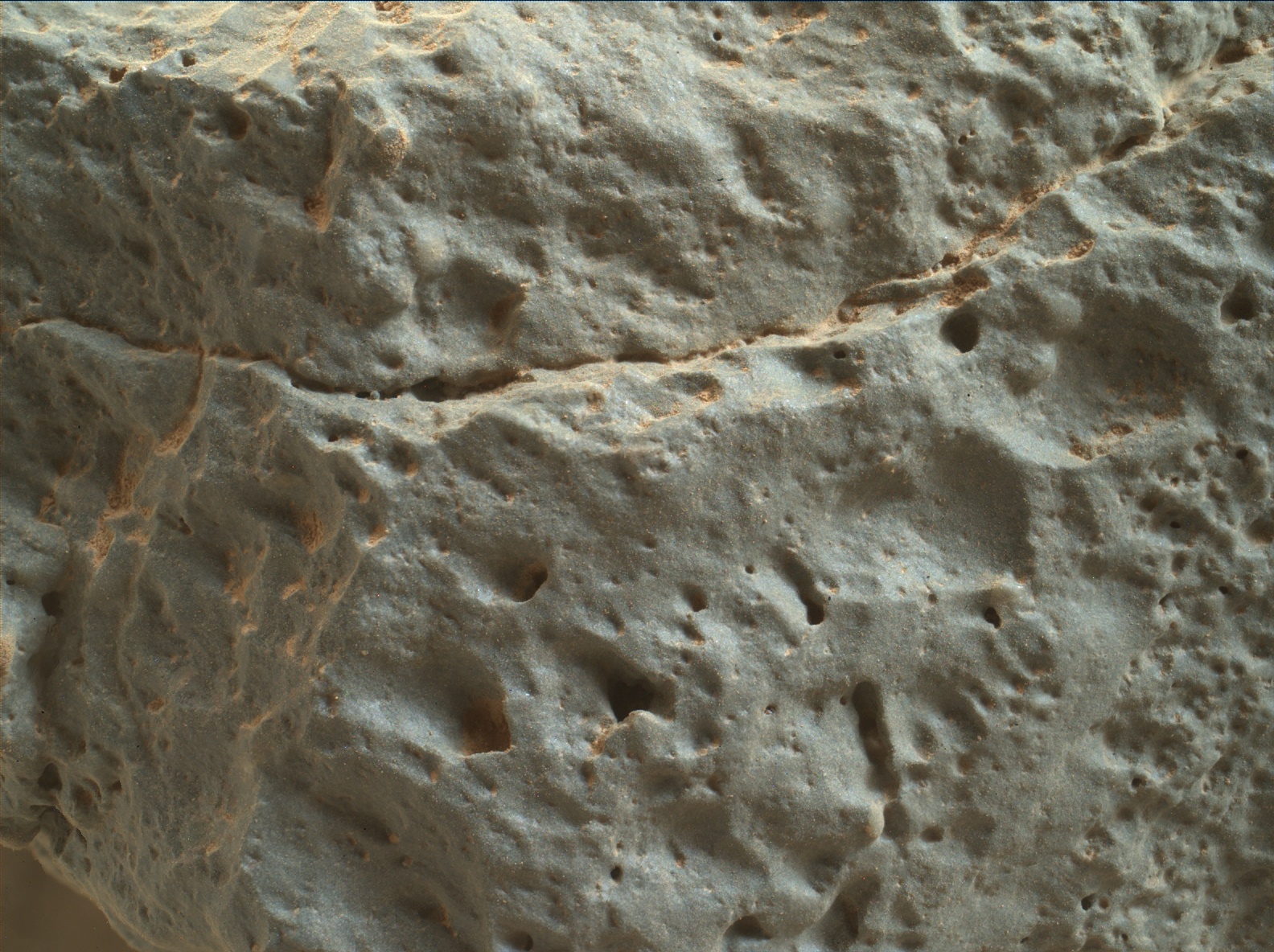
NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on August 28, 2015, Sol 1087 of the Mars Science Laboratory Mission.
Credit: NASA/JPL-Caltech/MSSS
Wheel watching 2015 continues with this new striking image of the Curiosity rover’s continuing issue in dealing with wear and tear due to the Red Planet’s rocky terrain.
Navcam Left B image taken from NASA’s Mars rover Curiosity on August 28, 2015, Sol 1087.
Credit: NASA/JPL-Caltech

Where to land the NASA Mars 2020 rover? Scientists and engineers gathered at an August workshop to assess where best to land the Red Planet robot.
Credit: NASA/JPL
Work is underway to develop NASA’s next nuclear-powered Mars rover. The Mars 2020 mission is largely based on the successful Mars Science Laboratory project that plopped down the Curiosity rover on the Red Planet in August 2012.
However, there are a variety of distinctions.
The Mars 2020 robot would explore a select site that’s geologically diverse, likely to have been habitable and seek out signs of past life.
But also on tap is for the rover to collect and stash Mars samples in tubes, then drop off the tubes at a depot. Those samples, years later, would be scooped up by a future “ship and shoot” robotic mission that flings the specimens back to Earth.

Comparative view of Curiosity rover and future Mars 2020 rover in terms of performance on the Red Planet.
Credit: Trosper/NASA/JPL-Caltech
Primary goal
A mix of rover specialists and landing site scientists met in early August at the second landing site workshop for the 2020 Mars rover mission.
The primary goal of the recent gathering was to pare down a large number of candidate landing sites that emerged from the first workshop. Future landing site meetings will eventually pick the winning exploration zone.

Mars rover specialists and landing site scientists met in early August at the second landing site workshop for the 2020 Mars rover mission.
Credit: Leonard David
For more information on this meeting and what took place, go to my new story up on SPACE.com at:
NASA’s Next Nuclear-Powered Mars Rover: Building the Beast
by Leonard David, Space.com’s Space Insider Columnist
August 27, 2015 05:05pm ET

Curiosity Mars rover took this Mars Hand Lens Imager (MAHLI) image on August 26, 2015, Sol 1085.
Credit: NASA/JPL-Caltech/MSSS
Handlers of the Curiosity rover report a further march of the Mars machinery – a nearly 128-feet (39-meter) drive on Sol 1085.
That drive has left the rover in another “target-rich area,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Chemistry & Camera (ChemCam) observations were made on the brighter parts of an outcrop just south of the rover. The targets for ChemCam and Mastcam observations were named “Fitzpatrick,” “Keith,” and “Fred and George Creek.”
Mastcam was also to acquire 2 mosaics before the rover drives away today on Sol 1087.
Daily variations
Herkenhoff notes that planned for Sol 1088 are early-morning Mastcam and Navcam images of the Sun and sky.
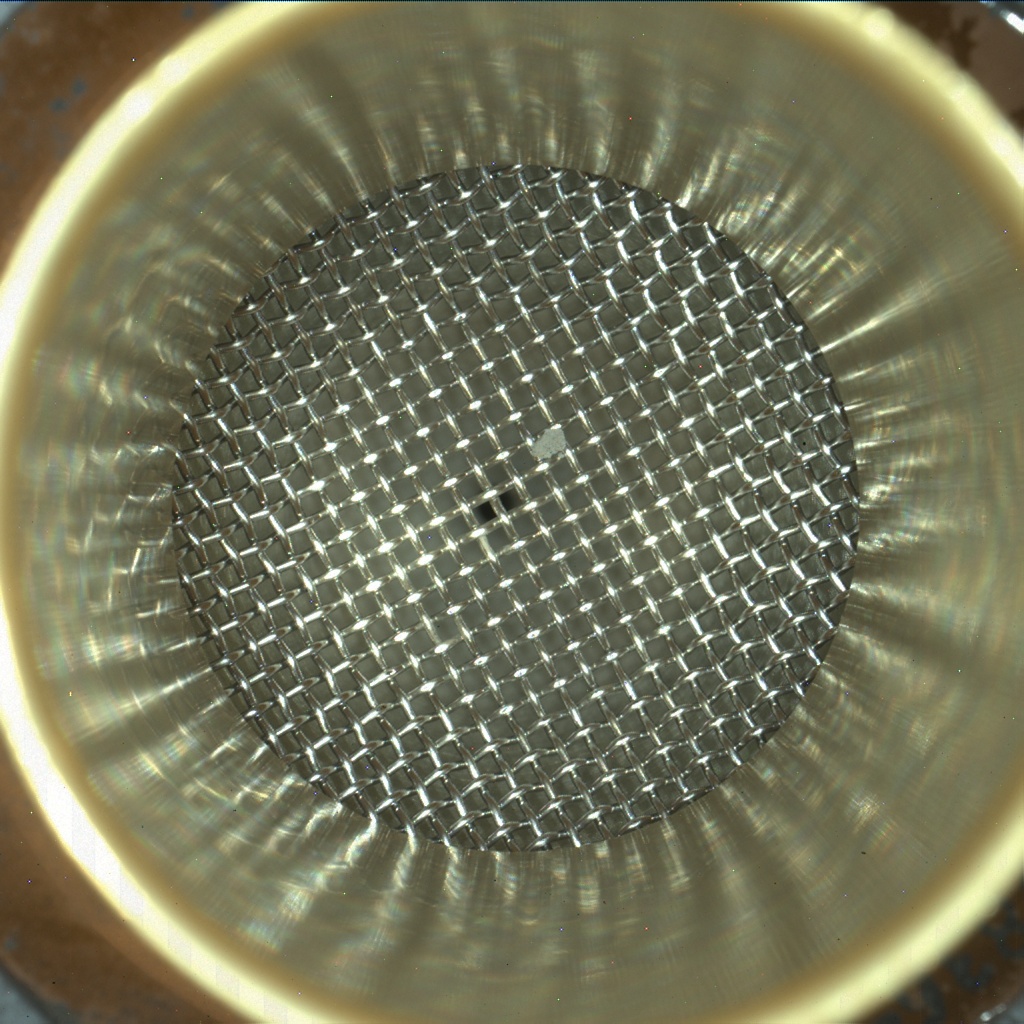
MAHLI image taken August 4, 2015, Sol 1064 of inlet funnel of the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin).
Credit: NASA/JPL-Caltech/MSSS
“Similar observations are planned around noon that sol, to measure daily variations in atmospheric dust and clouds,” Herkenhoff adds.
Lastly, the inlet funnel of the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) is slated to be vibrated in an attempt to remove a particle from the screen over the funnel, Herkenhoff points out.
As always, the dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Virgin Galactic’s new space pilot, Nicola Pecile.
Credit: Virgin Galactic
Sir Richard Branson’s Virgin Galactic has announced the selection of space pilot Nicola Pecile joining the spaceliner’s commercial flight team led by Chief Pilot Dave Mackay.
Pecile has logged more than 5,400 flight hours in 132 types of aircraft including gliders, general aviation aircraft, multi-engine non centerline thrust aircraft, military jet trainers, tactical high performance fighters, and helicopters.
Pecile joins Virgin Galactic after four years at the National Test Pilot School (NTPS) in Mojave, where he served as Director of Operations and Experimental Test Pilot Instructor on fixed wing and rotary wing aircraft.
NTPS is the only civilian test pilot school out of the seven world-wide schools recognized by the Society of Experimental Test Pilots.
Prior to joining the Mojave community, Pecile served for 20 years in the Italian Air Force, initially as a fighter pilot flying the Tornado FMk.3 ADV and later as an experimental test pilot.
“Virgin Galactic continues to grow and attract top talent like Nicola, and we couldn’t be more proud of our distinguished pilot corps,” said Mike Moses, Virgin Galactic’s Senior Vice President of Operations.
Spaceship manufacturing
Virgin Galactic suffered a tragedy last year by loss of one of two test pilots as a SpaceShipTwo disintegrated mid-air during a test flight. Work on the second SpaceShipTwo is now underway.

After test mishap last year, the second SpaceShipTwo is under construction.
Credit: Virgin Galactic
Virgin Galactic was founded by Sir Richard Branson and owned by the Virgin Group and Aabar Investments PJS.
To date, 700 men and women from over 50 countries have reserved places to fly on Virgin Galactic’s reusable suborbital spaceship launch system, consisting of a carrier aircraft, the WhiteKnightTwo, and the spacecraft, SpaceShipTwo.
SpaceShipTwo and WhiteKnightTwo are manufactured and tested in Mojave, California, by its manufacturing wing, The Spaceship Company.
Once the space launch system undergoes extensive testing, commercial spaceflight operations will be based at Spaceport America in New Mexico, a purpose-built commercial spaceport.
Credit: AAS
Very exciting day for me!
Just notified that I have been selected to receive the American Astronautical Society’s “Ordway Award for Sustained Excellence in Spaceflight History” in the category of journalism.
Myself and three others — Quest – The History of Spaceflight (publishing); David Hardy (artist) and Mark Wade (web) — are the first recipients of this award, established last year after the death of Fred Ordway.
Space historian and futurist, Fred Ordway.
Credit: CG Publishing/National Space Society
Space scientist and well-known author of visionary books on spaceflight, Ordway was in charge of space systems information at the Marshall Space Flight Center from 1960 to 1963 and before that performed a similar function for the Army Ballistic Missile Agency.
For many years, Ordway was a professor at the University of Alabama’s School of Graduate Studies and Research.
However, his greatest contribution has been to the popularization of space travel through dozens of books that he authored or coauthored.
Ordway was also technical consultant to the film 2001: A Space Odyssey and owned a large collection of original paintings depicting astronautical themes.
The Ordway Award is very special to me on a personal basis.
During my near 30-year stint in Washington, D.C., Fred Ordway was a close friend and mentor over the decades. He was a top-notch historian and a futurist rolled into one.

While the International Space Station (ISS) flies over Europe, cosmonaut Oleg Kononenko controls the German Aerospace Center’s ROKVISS robot in a laboratory in Oberpfaffenhofen with the Kontur-2 joystick.
Credit: ROSKOSMOS /O. Kononenko.
This autumn the first “tele-handshake” will be performed between the International Space Station (ISS) and Earth.
The Institute of Robotics and Mechatronics at Deutsches Zentrum für Luft- und Raumfahrt (DLR) is leading the experiment. A preliminary test of the human-machine interaction took place on August 18, 2015.
From the ISS, cosmonaut Oleg Kononenko controlled the Robotic Components Verification on the ISS (ROKVISS) robot on the ground.
According to the DLR, the connection between space and Earth is not one-directional – the ROKVISS (Robotic Components Verification on the ISS) sends data back to the joystick when contact forces occur on the ground.
Force feedback
The upcoming experiment will have a cosmonaut on board the ISS use the Kontur 2 joystick to operate a DLR robot – “Space Justin” — who will remotely shake a person’s hand, making use of force feedback.
This telepresence technology testing is geared for use in future space exploration scenario. For example, a space traveler could operate a robotic assistant from a space station while it performs tasks requiring fine motor skills, say on the surface of Mars or on the Moon to build habitats.
The astronauts would make use of force feedback to enable them to feel as though they are working locally.
Smooth rehearsal
In the August 18 trial run, Kononenko moved the metal fingers of ROKVISS in all directions and gently touched a contoured surface.

While cosmonaut Oleg Kononenko in the International Space Station uses the Kontur-2 joystick to control the ROKVISS robot on the ground, researchers at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) monitor and supervise the contact and give instructions.
Credit: DLR
Jordi Artigas from the DLR Institute of Robotics and Mechatronics provided the cosmonaut appropriate instructions from the ground. Special sensors measured the contact forces when the robot came into contact with an obstacle; this collision data is sent to actuators in the joystick, which then provides feedback to the operator.
“The rehearsal went smoothly, the technology works,” said DLR researcher Cornelia Riecke in a press statement. In total, just four minutes were available to test the remote control between the ISS and DLR.
The transmission of data incurs an average time delay of 30 milliseconds.
“Human reaction time is about 100 milliseconds and causes no problems for the cosmonauts, but for robotic control 30 milliseconds is already a huge challenge, since the closed loop between Earth and the ISS may become unstable,” explains Artigas.
Time domain
The loss of data packets during transmission complicates smooth cooperation between human and a robot.

Practice for the first ‘tele-handshake’ from space. Russian cosmonauts Gennady Padalka (at the joystick) and Oleg Kononenko (on the screen) train at the German Aerospace Center (DLR) for the first ‘tele-handshake’ in the autumn of 2015. At that time, a cosmonaut on the International Space Station will use the Kontur 2 joystick to operate the DLR’s “Space Justin” robot who will remotely shake someone’s hand.
Credit: DLR
However, a method developed by DLR for telepresence systems – “Time Domain Passivity Control” — allows for stable and high-performance operation under all possible communications conditions, including delays of up to approximately one second.
The DLR Institute of Robotics and Mechatronics has been researching the field of telerobotics since the 1990s. Over the years, DLR researchers controlled the ROTEX robot inside the space shuttle from the ground. Also, a flight model of the ROKVISS robot was utilized on the outside of the ISS.
Now, for the first time, explains the DLR, a robot with multiple degrees of freedom was controlled from the ISS with force feedback.

A panorama combining images from both cameras of the Mastcam on NASA’s Curiosity Mars Rover shows diverse geological textures on Mount Sharp. Three years after landing on Mars, the mission is investigating this layered mountain for evidence about changes in Martian environmental conditions.
Credit: NASA/JPL-Caltech/MSSS
Over last weekend, NASA’s Curiosity rover on Mars was productive, relaying back to Earth loads of data – including up-close inspection of “Ravalli” making use of its Mars Hand Lens Imager (MAHLI).
NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on August 23, 2015, Sol 1082.
Credit: NASA/JPL-Caltech/MSSS
Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona reports the robot made a nearly 70-foot (22-meter) drive on Sol 1083. The rover was rolled into place to observe rock outcrops.
Plans call for Chemistry & Camera (ChemCam) observations of two targets: “Tinder Box” and “Gordon.”
Curiosity’s Mast Camera (Mastcam) will acquire mosaics of these targets as well as “Centennial Range” and “Willow Ridge,” Herkenhoff reports.
Path ahead
“There isn’t time/power for much more science, as another drive is planned for Sol 1085,” Herkenhoff adds, with overnight use of the Sample Analysis at Mars (SAM) Instrument Suite.
ChemCam, Mastcam and Navcam will make more atmospheric observations late in the morning of Sol 1086. Also on the books is use of the Rover Environmental Monitoring Station (REMS).
The Little Rover: The circular version of Curiosity’s recent selfie inspired this work by MAHLI’s Megan Kennedy Wu.
Credit: Megan Kennedy Wu
Taking a look at its surroundings, rover images show that “the path ahead is rough,” Herkenhoff observes, “but looks very interesting!”
Curiosity was launched from Earth in November 2011, landing on the Red Planet in August 2012.

