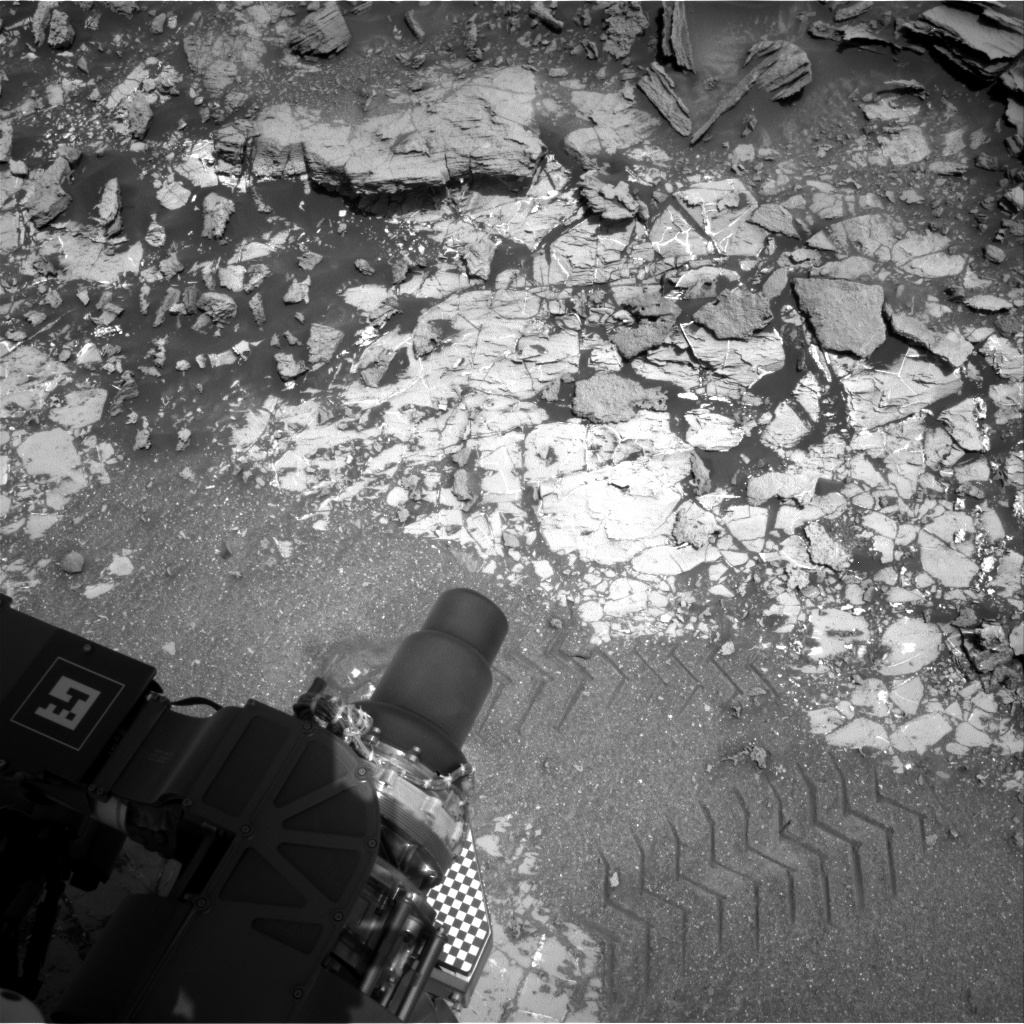
NASA’s Curiosity Mars rover is eyeing “Missoula” – a target that’s a ledge in the upper left portion of this Navcam image.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is busy imaging a number of targets – one of which is called “Missoula.”
“We refer to it as a dog’s eye mosaic, meaning that we use the MAHLI camera to take a series of images along a vertical face – essentially sticking our nose in there to get a good view,” Edgar explains.
The Mars Hand Lens Imager (MAHLI) is located on the turret at the end of the rover’s robotic arm.
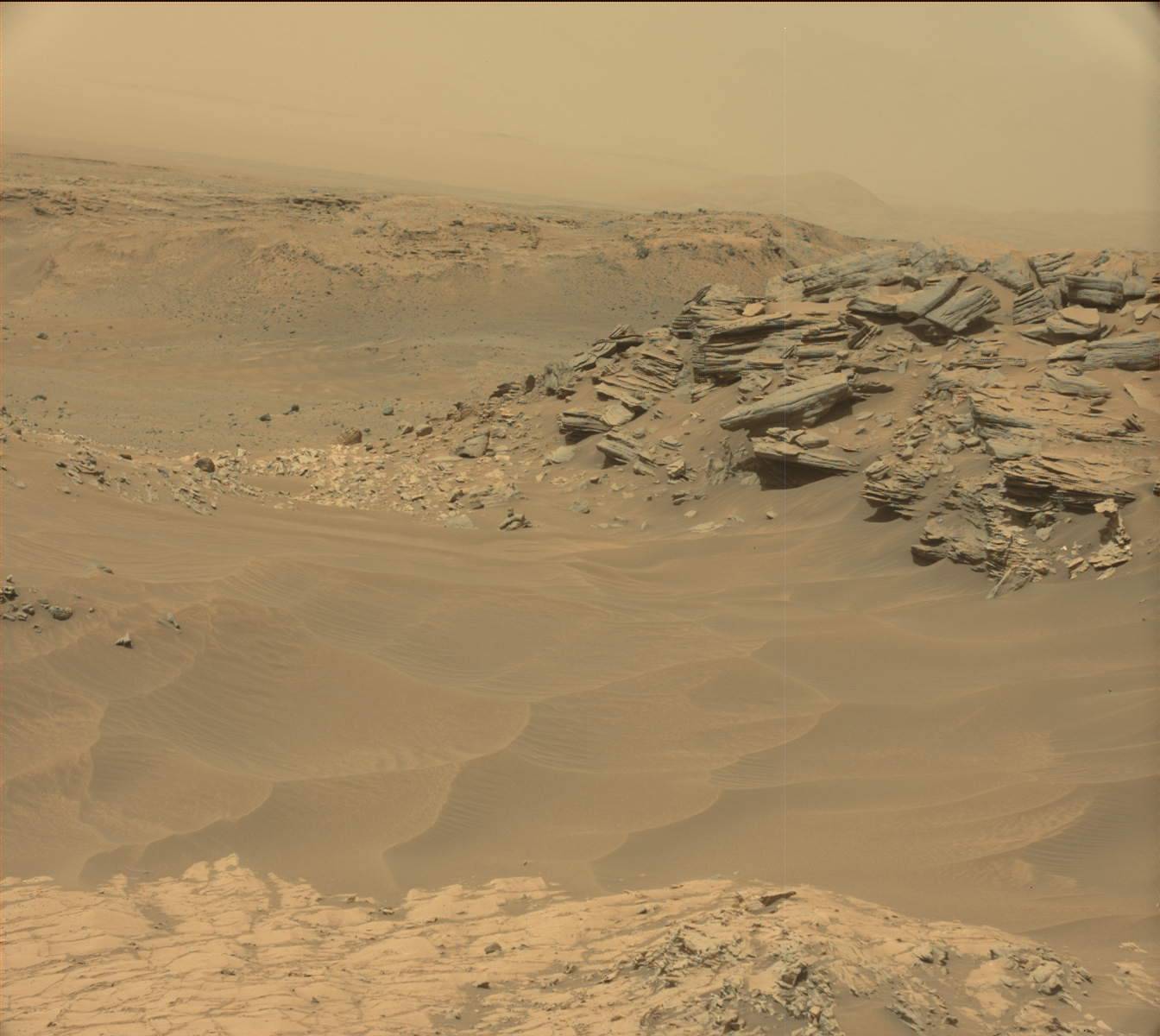
Mars as seen from
Curiosity rover on May 30.
Credit: NASA/JPL-Caltech/MSSS
Edgar says that the current plan for rover duties also includes several ChemCam observations along such targets as “Selow” and “Clark.”
Doing so would characterize any changes in chemistry from two geological units: the Pahrump unit into the Stimson unit, Edgar adds.
Another ChemCam assessment is focused on the target “Seeley” – a broken rock that exposes a fresh surface.
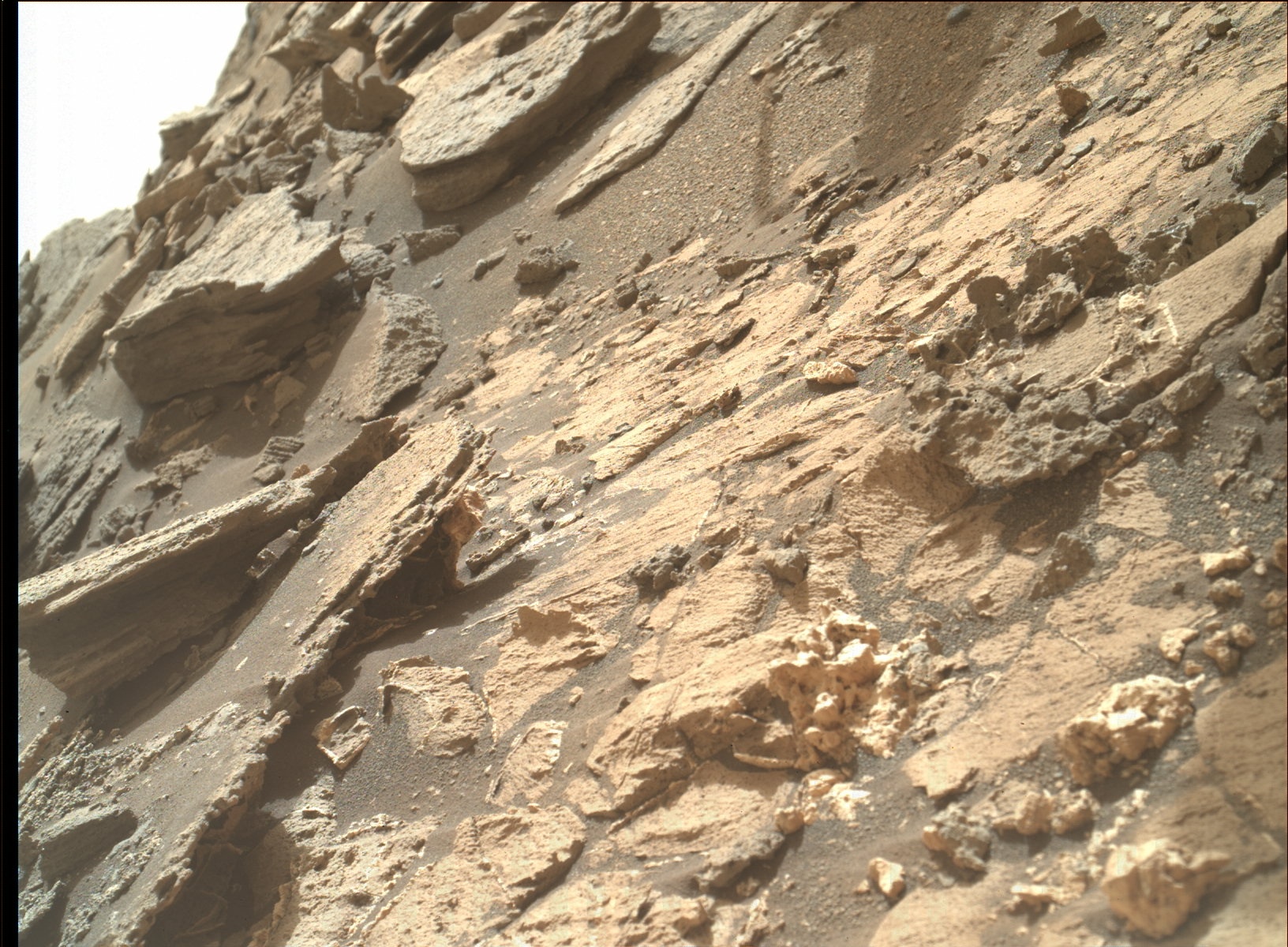
Mars Hand Lens Imager (MAHLI) image taken on June 28, Sol 1028. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
Lastly, a Mastcam mosaic is to capture some of the surrounding mineral veins that Curiosity is exploring.
Planning is underway for working the rover during its Sol 1032.

