Author Archive
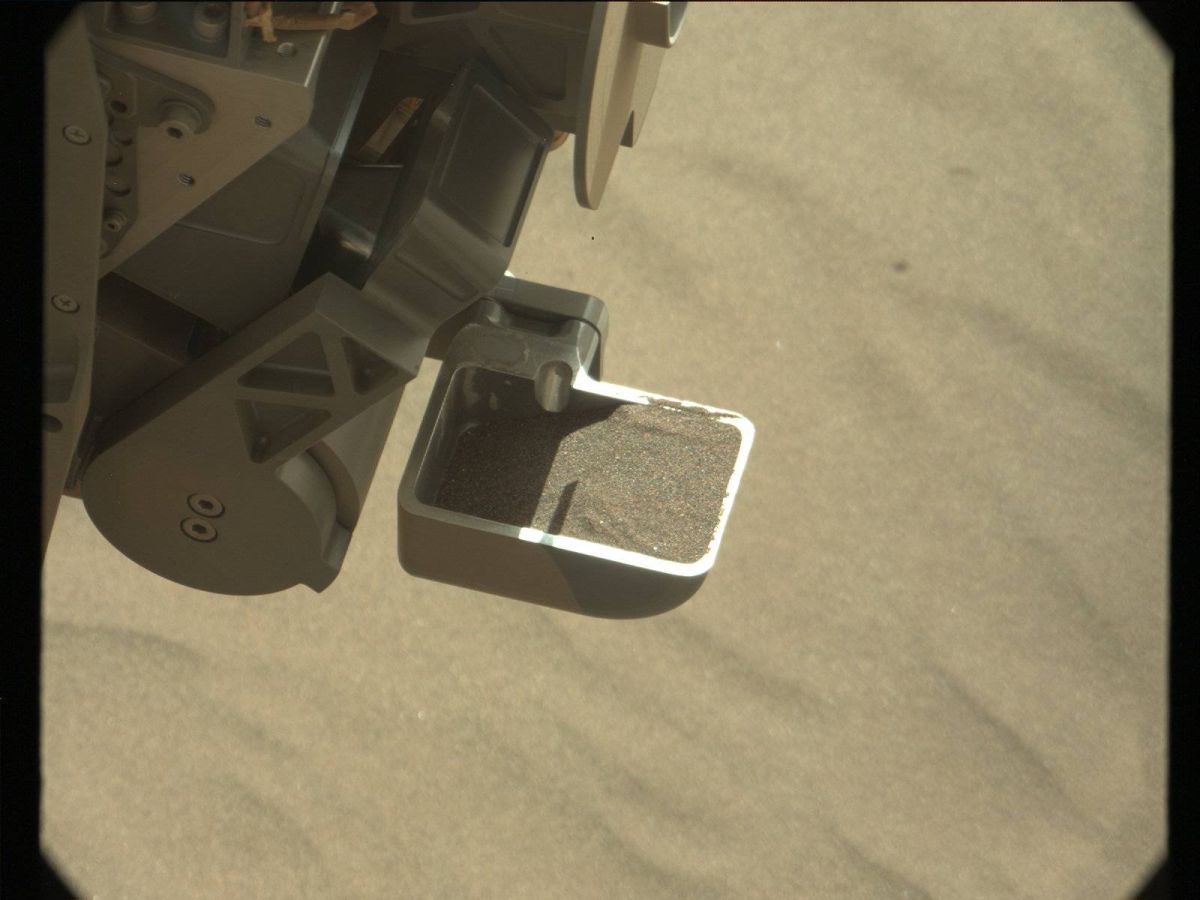
Curiosity Mastcam Right image taken on Sol 1228 January 19, 2016.
Credit: NASA/JPL-Caltech/MSSS
Today, the Curiosity rover on Mars is at work on Sol 1231.
Mars researchers are continuing their campaign to analyze “Namib Dune” – geared to dropping off a specimen of collected sand in the rover’s Sample Analysis at Mars (SAM) Instrument Suite.
Earlier, the sol 1230 plan called for a science block with some Chemistry & Camera (ChemCam), Mastcam, and Navcam observations.
“But unfortunately that had to be cut to save power, so those observations will have to happen over the weekend,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center and a member of the ChemCam team on the Mars Science Laboratory (MSL).

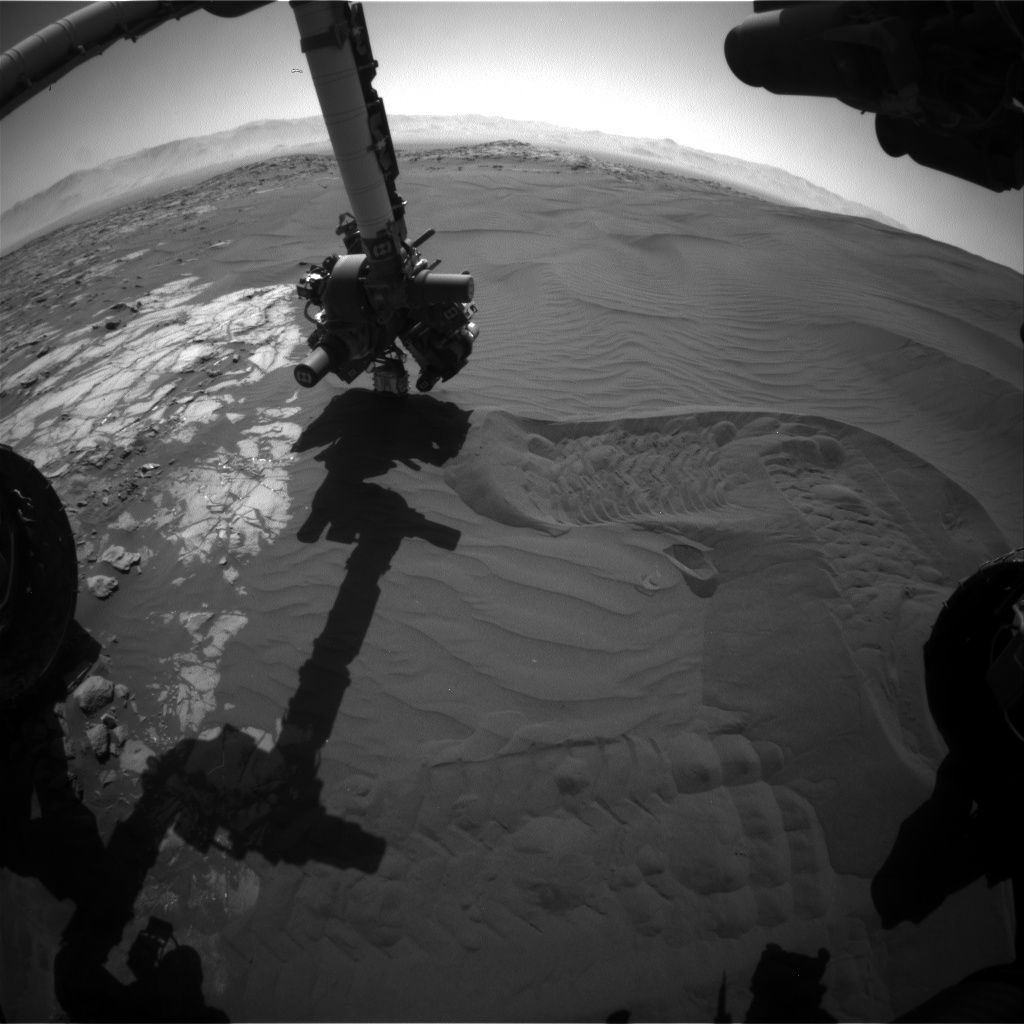
New image from Curiosity’s Front Hazcam Right B camera, taken on Sol 1230, January 22, 2016.
Credit: NASA/JPL-Caltech
Inlet outlook
With the science block removed, Anderson adds, the first activity on Sol 1230 was a Mastcam observation of the SAM inlet.
After this, the rover was slated to drop off a sample of sand for SAM to analyze.
Then while the arm is active, the Mars Hand Lens Imager (MAHLI) was to observe the dump piles, including some night-time observations using the built-in LEDs to illuminate the piles.
Curiosity’s Alpha Particle X-Ray Spectrometer (APXS) was also on tap to carry out a couple of overnight measurements on two of the dump piles, Anderson notes.
Sample handling system
On Sol 1231, the schedule was to start off with some Navcam and Hazcam images to document where the APXS was making its measurements, plus Mastcam observations of the SAM inlet again.
This is to be followed by some arm activities to clean out the components of the sample handling system.
“Then we’ll dive back in and collect another scoop of material from the dune, sieve it, and deliver it to SAM too. Finally, APXS will be placed on another of our dump piles for an overnight measurement. And of course [Rover Environmental Monitoring Station] REMS and [Dynamic Albedo of Neutrons] DAN will be collecting data each sol of the plan as usual,” Anderson concludes.
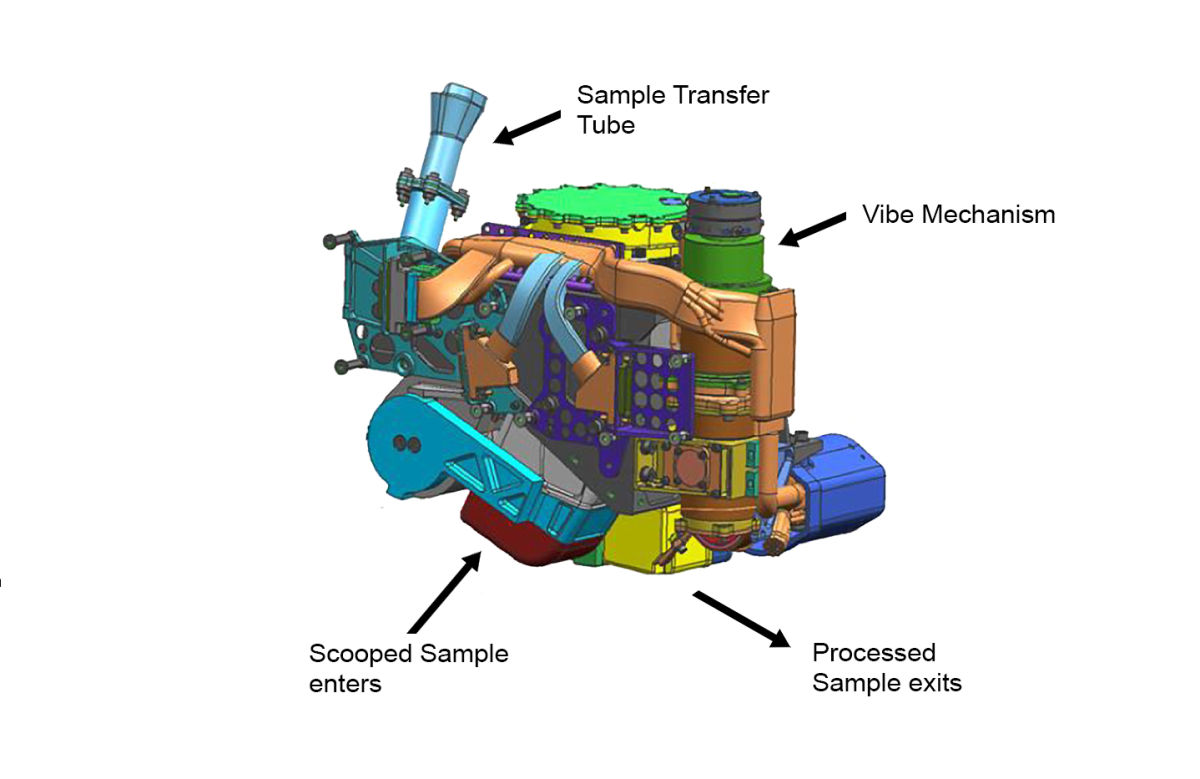
This false-color engineering drawing shows the Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA) device. It scoops, sieves and delivers samples. CHIMRA is attached to the turret at the end of the robotic arm on NASA’s Curiosity Mars rover.
Credit: NASA/JPL-Caltech
Moves not previously used
According to the Jet Propulsion Laboratory Curiosity website, Curiosity’s current work is the first close-up study of active sand dunes anywhere other than Earth.
Furthermore, at its current location for inspecting an active sand dune, NASA’s Curiosity Mars rover is adding some sample-processing moves not previously used on Mars.
“Sand from the second and third samples the rover is scooping from ‘Namib Dune’ will be sorted by grain size with two sieves,” the JPL site adds. “The coarser sieve is making its debut, and using it also changes the way the treated sample is dropped into an inlet port for laboratory analysis inside the rover.”
Curiosity’s study of dunes is providing information about how wind moves and sorts sand particles in conditions with much less atmosphere and less gravity than on Earth, the JPL website explains.

Search for ET – an ongoing enterprise. Allen Telescope Array is one of many attempts to answer: Are we alone?
Credit: Seth Shostak/SETI Institute
Forget that overused, hackneyed query: Are we alone?
Arguably, the real question at hand may be how to cope with crowds of extraterrestrial civilizations.
With increasing regularity we learn of exo-planet detection. But with those observations, is the prospect of locating other starfolk a sure bet?
For more details, please read my new Space.com story:
When Will We Make Contact with Intelligent Aliens?
by Leonard David, Space.com’s Space Insider Columnist
January 21, 2016 02:00pm ET
http://www.space.com/31662-alien-civilizations-when-make-contact.html

Credit: NASA, ESA, and the Hubble Heritage Team (STScI/AURA)
It’s no wonder we haven’t heard from extraterrestrials. That’s because they are long-gone, extinct.
Astrobiologists from Australian National University (ANU) call it the “Gaian bottleneck” – life on other planets would likely be brief and become extinct very quickly.
“Early life is fragile, so we believe it rarely evolves quickly enough to survive,” contends Aditya Chopra from the ANU Research School of Earth Sciences and lead author on a new paper published in the journal, Astrobiology.
Early microbial life on Venus and Mars, if there was any, failed to stabilize the rapidly changing environment, adds co-author Associate Professor Charley Lineweaver from the ANU Planetary Science Institute.

Different bottleneck scenarios and their fossil predictions. (A) Emergence Bottleneck. Life rarely emerges even on
wet rocky planets. Few planets will have life or even fossils of extinct life. On the few planets where life does emerge, it
persists for billions of years. (B) No Emergence Bottleneck. Life emerges with high probability and usually persists for billions
of years. Thus, life will be abundant on planets throughout the Universe. There will be many planets where life persisted for
billions of years and then went extinct. On the oldest uninhabited planets, fossils of complex life will be abundant. (C) Gaian
Bottleneck. Life emerges with some probability (possibly quite high), but it goes extinct within a billion years (green).
Alternatively, some small fraction of inhabited planets successfully pass through the Gaian bottleneck (light green). The Gaian
bottleneck model predicts that the vast majority of the fossils in the Universe will be from extinct microbial life.
Graphic: Astrobiology
Sliding into oblivion
They propose a potentially universal sequence of events on initially wet rocky planets, a kind of sliding scale into oblivion:
- Hot, high bombardment, uninhabitable.
- Cooler, reduced bombardment, continuous volatile loss.
- Emergence of life in an environment with a tendency to evolve away from habitability.
- Inability to maintain habitability, followed by extinction.
The scientists suggest new life would commonly die out due to runaway heating or cooling on their fledgling planets.
“One intriguing prediction of the Gaian Bottleneck model is that the vast majority of fossils in the universe will be from extinct microbial life, not from multicellular species such as dinosaurs or humanoids that take billions of years to evolve,” suggests Lineweaver.
Riding a wild bull
Chopra and Lineweaver conclude in their paper:
“Between the early heat pulses, freezing, volatile content variation, and runaway positive feedbacks, maintaining life on an initially wet rocky planet in the habitable zone may be like trying to ride a wild bull. Most life falls off. Life may be rare in the Universe, not because it is difficult to get started, but because habitable environments are difficult to maintain during the first billion years.”
To read this intriguing Astrobiology paper, go to:

This artistic rendering shows the distant view from Planet Nine back towards the sun. The planet is thought to be gaseous, similar to Uranus and Neptune. Hypothetical lightning lights up the night side.
Credit: Caltech/R. Hurt (IPAC)
Researchers at Caltech have found evidence of a giant planet tracing a bizarre, highly elongated orbit in the outer solar system.
Caltech’s Konstantin Batygin and Mike Brown discovered the planet’s existence through mathematical modeling and computer simulations. However, the object has yet to be observed directly.
The new research is reported in the February 2016 issue of The Astronomical Journal.
Should-be-there world
This should-be-there world has been nicknamed Planet Nine by the researchers, and has a mass about 10 times that of Earth and orbits about 20 times farther from the Sun on average than does Neptune (which orbits the Sun at an average distance of 2.8 billion miles).
In fact, it would take this new planet between 10,000 and 20,000 years to make just one full orbit around the Sun, according to a Caltech press statement.
Start searching
Brown notes that the putative ninth planet—at 5,000 times the mass of Pluto—is sufficiently large that there should be no debate about whether it is a true planet.

Credit: Caltech/R. Hurt (IPAC)
Diagram was created using WorldWide Telescope.
“I would love to find it,” says Brown. “But I’d also be perfectly happy if someone else found it. That is why we’re publishing this paper. We hope that other people are going to get inspired and start searching.”
If Brown’s name sounds familiar, he played a significant role in the demotion of Pluto from a planet to a dwarf planet.
“All those people who are mad that Pluto is no longer a planet can be thrilled to know that there is a real planet out there still to be found,” Brown says. “Now we can go and find this planet and make the solar system have nine planets once again.”
The paper in The Astronomical Journal is titled “Evidence for a Distant Giant Planet in the Solar System.”
These findings by Batygin and Brown are available at:
http://iopscience.iop.org/article/10.3847/0004-6256/151/2/22/pdf
Check out this informative video by the researchers at:
https://www.youtube.com/watch?time_continue=8&v=6poHQ2h00ZA
A Planet Nine animation can be viewed at:

If you’re a woman looking for inspiration to pursue a career in the space and technology industries, take a look at the Rocket Women website.
The site provides a platform through which women interested in the space and technology industries can gain information about a career and have questions answered.
“My mission is to inspire women around the world and provide advice on working in the space and technology industries,” explains Vinita Marwaha Madill.
Madill has founded Rocket Women. Its aim is to inspire women to study Science, Technology, Engineering and Math (STEM) and use those skills to consider a career in the space industry.
Inspirational women
Madill has been involved in spacesuit design for the European Space Agency (ESA) along with working as an Operations Engineer for the International Space Station at the German Aerospace Centre (DLR).
The informative Rocket Women website highlights inspirational women, STEM organizations, and details why Rocket Women was formed.

Courtesy: Rocket Women
While there, you’ll find a new article from Glamour magazine:
“Would You Go to Mars? Meet the Four Women Astronauts Who Can’t Wait to Go” by Ginny Graves, published on January 6, 2016.
The article features the newest four female members of NASA’s astronaut corps, describing how they felt the moment they realized they were chosen in 2013 and how they were inspired to apply for space travel.
For further details, go to Vinita Marwaha Madill’s Rocket Women site at:
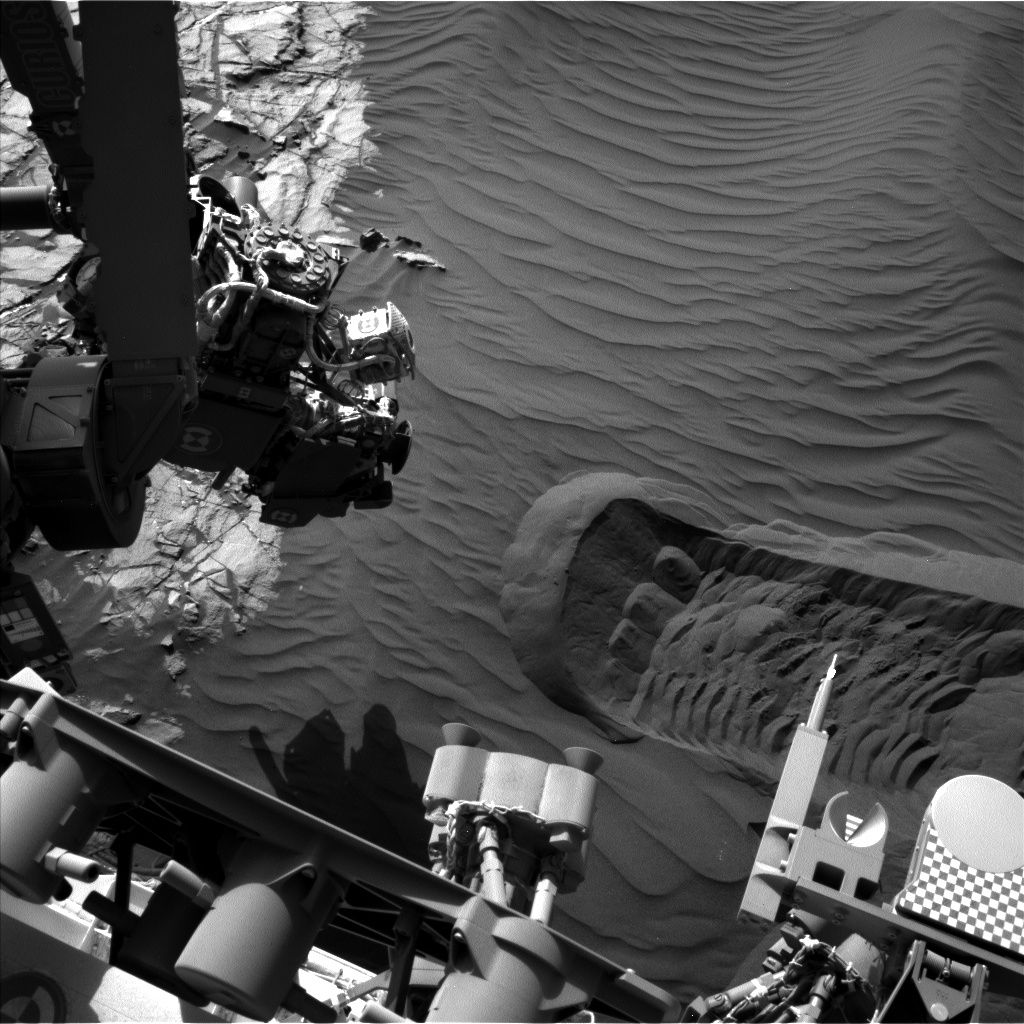
Curiosity Front Hazcam Right B image taken on Sol 1227, January 18, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now in Sol 1228 and Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona, reports the campaign to analyze the Bagnold dunes continues!
This dune field is along the northwestern flank of Mount Sharp.
Sand dune selfie
The plan for Sol 1228 involves extensive rover arm activity, starting with Curiosity taking a “selfie” in front of the sand dune, Anderson explains. That duty will be followed by scooping up and sieving a sample of sand.
The robot’s Mastcam and the Mars Hand Lens Imager (MAHLI) will both thoroughly document the scooping process. Mastcam also has a change detection observation of the target “Hebron,” Anderson adds.
Dump piles
Looking toward Sol 1229, Curiosity’s Mastcam will repeat that the previous change detection observation two more times.

Curiosity’s Mars Hand Lens Imager (MAHLI) — located on the turret at the end of the rover’s robotic arm — snagged this image on January 19, 2016, Sol 1228.
Credit: NASA/JPL-Caltech/MSSS
Mastcam also has observations of the dump piles from the scoop target “Gobabeb”, Anderson notes, plus a Mastcam and Navcam photometry experiment.
Curiosity’s Chemistry & Camera (ChemCam) is slated to take passive spectra of the Gobabeb dump piles, followed by active analysis of dump pile A. That will be followed by atmospheric observations by Mastcam and Navcam.
In the afternoon on Sol 1229, Anderson says, ChemCam will analyze dump pile B, and Mastcam will take another change detection image of Hebron. The Mastcam and Navcam photometry experiment will also collect a few more images on sol 1229.
These planned rover activities, as always are all subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

China’s Long March 5 engine test.
Credit: CMSE/CCTV
China is pushing the throttle forward in its 2016 space exploits, an agenda that includes a piloted space mission and the maiden flights of two new boosters.
According to state-run news agencies, the China Aerospace Science and Technology Corporation has spotlighted plans to launch this year the Tiangong 2 space laboratory and the Shenzhou 11 crewed spacecraft and to test-fly the Long March 5 and Long March 7 rockets.
In a statement on the company’s website: “This year will see more than 20 space launches, the most missions in a single year.”
Booster basics
Long March 5 has a payload capacity of 25 tons to low Earth orbit, or 14 tons to geostationary transfer orbit. This booster is on tap to carry the Chang’e-5 lunar probe around 2017. If successful, this robotic sample return mission would check off China’s last chapter in a three-step lunar program of orbiting, landing and returning.

Work has been underway on China’s new Long March boosters.
Credit: China Aerospace Science and Technology Corporation
Long March 7 is a medium-sized booster able to carry up to 13.5 tones to low Earth orbit or 5.5 tons to sun-synchronous orbit at a height of 700 kilometers. This launcher is also assigned the task of carrying cargo to the planned space station.
Both boosters have been developed by the China Academy of Launch Vehicle Technology under the China Aerospace Science and Industry Corporation (CASC).
Space lab testing
The Tiangong 2 space laboratory is to be orbited in the first half of the year to test life support and space rendezvous technologies for the country’s future space station. The Shenzhou 11 piloted spacecraft is to follow, launched by a Long March 2F booster with the crew to rendezvous and latch up with the space laboratory.
China’s space planning calls for the country to loft the core module of its space station in 2018 to test related technologies and to research engineering issues. That larger space complex is to become fully operational about 2022, according to government sources.
Robot arm development
Meanwhile, new details regarding the Chinese Space Station Manipulator system (CSSM) are emerging.
Li Daming, a senior engineer at the Beijing Key Laboratory of Intelligent Space Robotic Systems Technology and Applications, reports the CSSM is designed for the missions of relocking spacecraft sections, docking assistance, installing equipment, and maintaining the space station.
Work on the CSSM system has been underway since 2007 and consists of two robotic arms.

Prototype Chinese Space Station Manipulator system (CSSM) undergoing testing.
Credit: Li Daming/Beijing Key Laboratory of Intelligent Space Robotic Systems Technology and Applications
“Compared with Russia and USA as well as some other developed countries, China has a big technology gap in materials, electronics, manufacturing, testing, etc. The CSSM provides the Chinese researchers and engineers a great opportunity for developing and advancing their space robotics technologies and experience,” Li and his colleagues noted last year in a paper delivered at Space 2015, a meeting of the American Institute of Aeronautics and Astronautics (AIAA).
Two arms
In a technical paper provided to Inside Outer Space, the CSSM system consists of two separate robotic arms: a Core Space Station Cabin’s Manipulator (CSSCM) and an Experimental Space Station Cabin’s Manipulator (ESSCM).
The CSSCM is nearly 35 feet long (10.5 meters). Max payload of the 7-jointed CSSCM is 55,116 pounds (25,000 kilograms).
The ESSCM is 18 feet (5.5 meters) in length. The two robot arms can work separately or combined as one robotic system.

China presses forward on its space station work.
Credit: CMSE
Major tasks
In terms of the overall Chinese space station program, the major tasks of the manipulators are:
— Cabin translocation and docking: The basic configuration of the space station consists of three individual cabins assembled through translocation and docking operations. First, the Experimental Space Station Cabin is docked to the axial port of the Core Space Station Cabin; and then, the side docking is achieved by separating, translocating and docking operation by the manipulator.
— Free-floating vehicle capture and docking: The manipulator can capture a free-floating vehicle and transfer it to berthing port of the Space Station for docking.
— Support an astronaut for extra-vehicular activities (EVA): With the support of the manipulator, an astronaut can be fixed to the tip of the manipulator using a foot stopper, to perform a large-scale movement task.
— Payload handling: Payloads can be transferred to different destinations by the manipulator.
— EVA status check: Regular inspection of China’s space station can be achieved by the manipulator’s moving and visual ability, and surface images can be transmitted back to the station for astronauts to determine the health status of the exteriors of the orbiting complex.
— Equipment installation, replacement or repair: The manipulator can be controlled by astronauts within the facility to install, replace or repair different equipment, such as a platform or payload.
According to Li and his associates, research results obtained so far indicate that the design of the Chinese Space Station Manipulator system “has been qualified to be manufactured and tested, which lays the foundation to support the construction of the space station of China.”
Curiosity rover image taken on Sol 1224 using Navcam Left B on January 15, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover has entered Sol 1225.
The robot carried out a series of arm activities on Sols 1223-1224, “scuffing” up dune sand.
They all went well, explains Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona and a member of the Mars Science Laboratory (MSL) science team, “and we’re ready for even more contact science in the 3-sol weekend plan.”
Sharp-crested ripple
On the to do list and to kick things off, the rover’s Chemistry & Camera (ChemCam) will analyze the composition of the wall of the scuff and will also document a sharp-crested ripple with the ChemCam Remote Microscopic Imager (RMI).

Curiosity Navcam Left B image taken on January 14, 2016, Sol 1223.
Credit: NASA/JPL-Caltech
As follow-on, Curiosity’s Mastcam is slated to document the ChemCam target and look for sand movement, Edgar adds.
Overnight, the rover’s Alpha Particle X-Ray Spectrometer (APXS) will be used to measure the composition of the background undisturbed sand.
Fine and coarse-grained sand
Edgar explains that the weekend plan includes delivery of a fine-grained portion of sand to the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) for analysis.
On tap is dumping both the fine and coarse-grained portions of sand and analyze the fine-grained dump pile with Mars Hand Lens Imager (MAHLI) and APXS.

Mars Hand Lens Imager (MAHLI) photo taken on January 14, 2016, Sol 1223.
Credit: NASA/JPL-Caltech/MSSS
This activity is to be followed by a Mastcam change-detection activity, followed by Navcam to monitor the deck of the rover to search for the movement of fines.
Overnight, CheMin will analyze the sample that was delivered the previous sol.
Given all that weekend work, Edgar concludes: “Phew! Sounds like a busy weekend for Curiosity!”
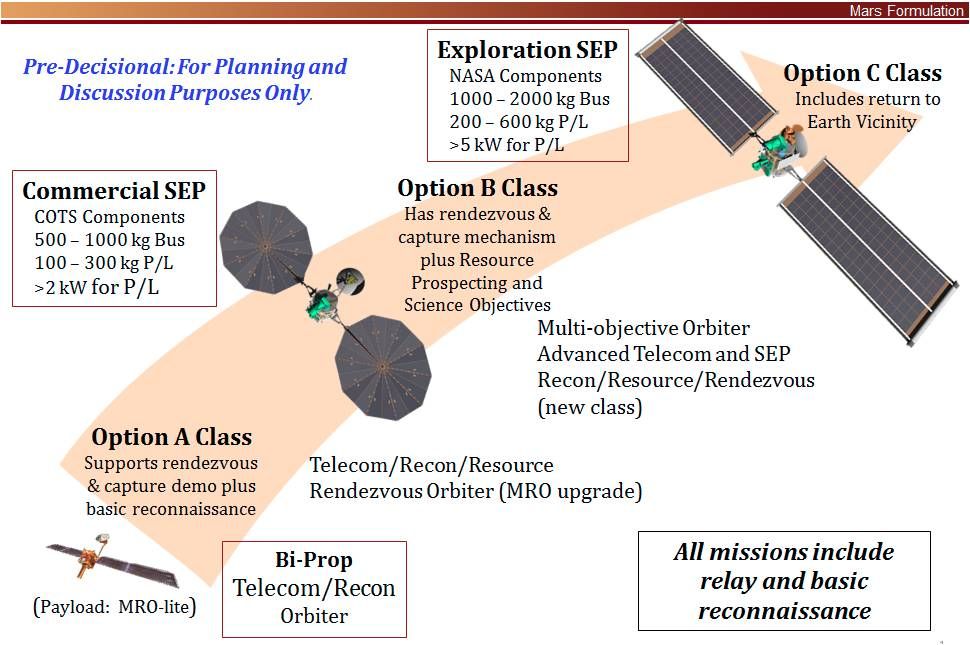
Credit: NEX-SAG
NASA is reviewing the idea of a multi-function next-generation Mars Orbiter.
If approved, this orbiter could be launched as early as 2022. One of the orbiter’s functions could be focused on the preparation for exploration by humans at Mars.
A Science Analysis Group (SAG) of the Mars Exploration Program Analysis Group dubbed NEX-SAG reports that a Mars Orbiter — utilizing Solar Electric Propulsion — and toting advanced telecommunications gear, could perform a 5-year mission in low Mars orbit.
New science
NEX-SAG suggests that the advanced Mars orbiter “could provide exciting new science and resource identification in addition to other programmatic functions,” such as:
- Replenish and advance the telecommunications and reconnaissance capability. Launched in 2022, this orbiter could back-up aging relay capabilities for a 2020 Mars rover in extended mission and for future spacecraft missions, whether for Mars sample return or in preparation for exploration by humans at Mars.
- Demonstrate progress in Mars orbit towards potential sample return, via release, rendezvous, and capture of a simulated orbiting container, or — if possible — the actual return of an orbiting sample cache from the surface of Mars to Earth vicinity.
- Conduct new science investigations motivated by discoveries about Mars over the last several years.
- Find resources on Mars for future missions, especially in support of human surface exploration, and address Strategic Knowledge Gaps (SKGs).
Scouting for martian resources
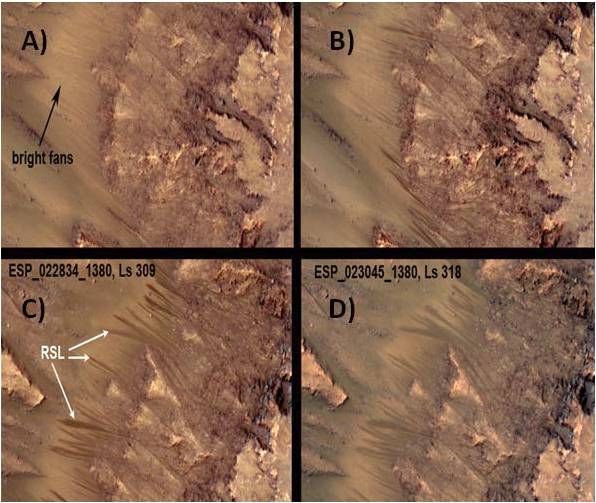
Recurring slope lineae (RSL) move down Martian slopes suggestive that water is flowing on Mars today. Images of RSL in Palikir Crater in Newton Basin showing: (A) faded RSL on bright fans from the previous Mars year and a hint of new RSL in bedrock regions; (B) new RSL appear; (C) the RSL lengthen downslope in early southern summer; and (D) the RSL are fading by mid-summer.
The ability of radar to probe below the surface could be key to tracing the source of subsurface water flow related to these features.
Credit: MRO HiRISE /U. Arizona/JPL/NASA
NEX-SAG participants point to the advanced Mars orbiter locating such resources as finding and quantifying the extent of shallow ground ice within a few meters of the surface and characterize its ice-free overburden; identify deposits with hydrated minerals as a water resource, and potential contaminants within these deposits; and spot site-specific mineral resources and geotechnical properties.
Furthermore, the next-generation Mars orbiter would extend the atmospheric climatology data base about the Red Planet with diurnal coverage and wind measurements.
Lastly, given Solar Electric Propulsion, the orbiter could address gravity and surface characteristics of the Martian moons – Phobos and Deimos.

Curiosity Front Hazcam Left B image taken on Sol 1222, January 13, 2016
Credit: NASA/JPL-Caltech
On Mars, the Curiosity rover’s Sol 1221 drive went well, notes USGS’s Ken Herkenhoff at the Astrogeology Science Center in Flagstaff, Arizona.
That drive included “a wheel scuff” in the dark sand dune, and the rover is in a good position for contact science,” he adds.
At this moment, the robot is engaged in activities during Sol 1223.
According to Herkenhoff, the Sol 1223-1224 plan calls for the robot to carry out arm activities, limited by the available power.
On tap is use of the Mars Hand Lens Imager (MAHLI) to take pictures of a couple of locations on the dune surface that has not been disturbed by the wheels, and of sand that was disturbed by the wheel scuff.

Image from Curiosity’s Mastcam Left taken on Sol 1221, January 12, 2016.
Credit: NASA/JPL-Caltech/MSSS
Undisturbed sand sampling
From there, the Alpha Particle X-Ray Spectrometer (APXS) is slated to be placed as close as possible to the scuffed sand for an overnight integration.
On Sol 1224, the robot’s scoop will be used to acquire a sample of the undisturbed dune sand, Herkenhoff reports.
This sample will be sieved and the finest material, less than 0.15 mm diameter grains, will be dropped into Curiosity’s Sample Analysis at Mars (SAM) Instrument inlet. “SAM will then analyze the sample overnight, into the wee hours of Sol 1225,” Herkenhoff adds.
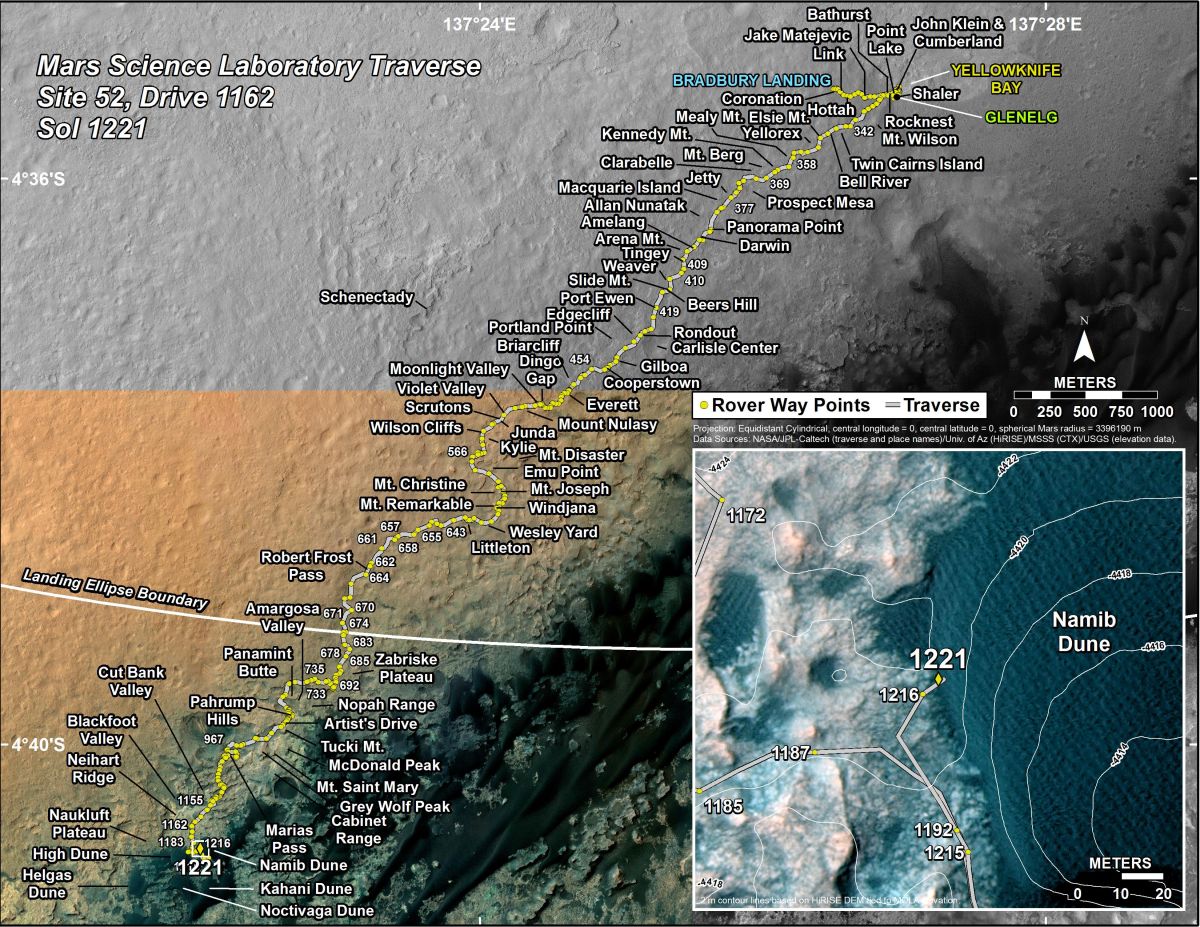
Curiosity’s Traverse Map Through Sol 1221. This map shows the route driven by NASA’s Mars rover Curiosity through the 1221 Martian day, or sol, of the rover’s mission on Mars as of January, 13, 2016.
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile). From Sol 1216 to Sol 1221, Curiosity had driven a straight line distance of about 16.51 feet (5.03 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

