Author Archive

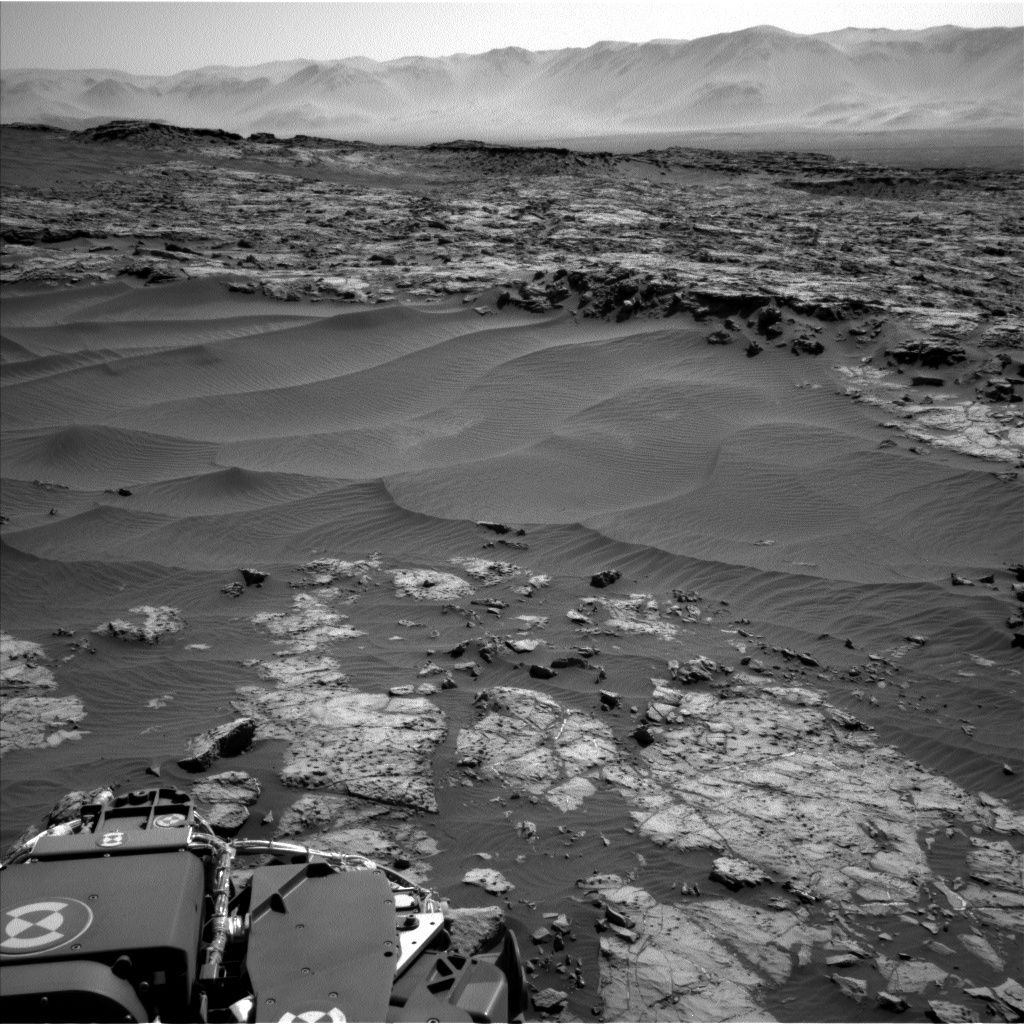
Mastcam Right camera on Curiosity snapped this image on Sol 1255 February 16, 2016.
Credit: NASA/JPL-Caltech/MSSS
It is Sol 1257 for the NASA Curiosity Mars rover.
New imagery has been released showing the surrounding Mars landscape as the rover continues its mission since landing on the Red Planet in August 2012.

Credit: NASA/JPL-Caltech/Univ. of Arizona
A new map has been posted showing the route driven by Curiosity through the 1255 Martian day, or sol, of the robot’s trek on Mars, as of February, 16, 2016).
Numbering of the dots along the line in the photo indicate the sol number of each drive. North is up. From Sol 1250 to Sol 1255, Curiosity had driven a straight line distance of about 48.76 feet (14.86 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Mastcam Left image taken by Curiosity on Sol 1255, February 16, 2016.
Image Credit: NASA/JPL-Caltech/MSSS

Navcam Right B image taken by Curiosity on Sol 1256, February 17, 2016.
Credit: NASA/JPL-Caltech

The asteroid that exploded near Chelyabinsk, Russia on Feb. 15, 2013 has provided scientists new insights into the risks of smaller asteroid impacts. This 3D simulation of the Chelyabinsk meteor explosion by Mark Boslough was rendered by Brad Carvey using the CTH code on Sandia National Laboratories’ Red Sky supercomputer. Andrea Carvey composited the wireframe tail. Photo by Olga Kruglova.
Credit: Sandia National Laboratories
The Chelyabinsk superbolide of February 15, 2013 created a whopper of a mess just south of the city of Chelyabinsk, Russia.
But where in space did the Chelyabinsk space rock come from?
Spanish astrodynamicists, brothers Carlos and Raúl de la Fuente Marcos and Sverre J. Aarseth, a scientist of the University of Cambridge (United Kingdom) have taken a hard look at that question.
Their work has been published by The Astrophysical Journal.
Dynamical relative
The results of their modeling suggest that asteroid 2011 EO40 is a good dynamical relative of the parent body of the Chelyabinsk superbolide…although there is no spectroscopic evidence linking genetically 2011 EO40 to Chelyabinsk, at least not yet.
They report that the common origin of both celestial objects is a possibility that cannot be discarded using the currently available evidence.
The results obtained by the team indicate that the Chelyabinsk impactor likely passed a gravitational keyhole on February 15, 1982 – during a close encounter with Earth at a distance shorter than 0.0015 AU.
As a result of this close encounter, the initial 2011 EO40-like trajectory of the Chelyabinsk meteoroid was changed into the one that drove the meteoroid to strike the Earth over three decades later.
Tangled web
The researchers do admit that it is very difficult to know the exact asteroid that gave origin to the Chelyabinsk superbolide because in the neighborhood of our planet there is a tangled web of overlapping gravitational resonances that confines asteroids of heterogeneous, or diverse, origin to very similar orbits.
“These gravitational resonances create an environment like that of the great cities that attract people from different places and with very diverse backgrounds,” says de la Fuente Marcos, who adds: “Having two very similar orbits today does not imply that these orbits were also similar in the remote past.”
Video catalog!
A number of video records obtained by casual eyewitnesses, dashboard cameras in cars, security, and traffic cameras have been made publicly available on the Internet. These represent a rich repository for future scientific studies of this unique event.
This catalog of video records of the 2013 Chelyabinsk superbolide can be found here:
http://meteor.asu.cas.cz/Chelyabinsk/
The new research by Carlos and Raúl de la Fuente Marcos and Sverre Aarseth is to be published next month by the journal Monthly Notices of the Royal Astronomical Society.
This work is now available at:
http://iopscience.iop.org/article/10.1088/0004-637X/812/1/26

Philae was the first human-made object to make a landing on a comet.
Credit: ESA/ATG Medialab
European scientists are in mourning regarding the passing of Philae, the little lander that could…and did.
On November 12, 2014, Philae made a spectacular comet landing, coming to rest on Comet 67P/Churyumov-Gerasimenko. It was ejected from the European Space Agency’s (ESA) Rosetta orbiter following a 10-year journey through space to reach the target.
Mums the word
“Unfortunately, the probability of Philae re-establishing contact with our team at the DLR Lander Control Center (LCC) is almost zero, and we will no longer be sending any commands…it would be very surprising if we received a signal now,” said Stephan Ulamec Philae Project Manager of the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR).
The last prolonged silence had already indicated that contact with the Philae lander will be increasingly unlikely, and the conditions on Comet 67P/Churyumov-Gerasimenko have become more hostile.

This series of 19 images, acquired by the Rosetta orbiter’s Optical, Spectroscopic, and Infrared Remote Imaging System (OSIRIS) on November 12, 2014, shows the Philae lander during its descent towards Comet 67P/Churyumov-Gerasimenko.
Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Meanwhile, ESA’s Rosetta spacecraft will continue to orbit the comet and carry out measurements with its scientific instruments until September 2016.
Last images
Despite the glum news about Philae, the communication unit onboard Rosetta will not be switched off yet. It will continue to listen for signals from the lander in the coming months until it will be switched off due to power constraints.
Scientists carried out over 60 hours of research with Philae’s instruments, acquiring images, sensing molecules and attempting to hammer the unexpectedly hard surface of the comet.

Two-part image taken by Philae comet lander.
Photo shows Philae on the surface – with one of its landing legs visible.
Credit: ESA/Rosetta/Philae/CIVA
The last images of Philae sitting on the comet will probably be acquired in the summer of 2016, when the Rosetta spacecraft photographs the lander during ultra-close fly-bys.
The Rosetta orbiter itself will be “landed” on the comet in September 2016, closing out its mission.
For an informative video on Philae’s landing, go to:
https://www.youtube.com/watch?v=8YIFlHqGqh4

Dump pile photo from Curiosity Mars Hand Lens Imager, taken on February 12, 2016, Sol 1251.
Credit: NASA/JPL-Caltech/MSSS
The Curiosity rover on Mars is deep into Sol 1252 today.
Ken Herkenhoff at the USGS Astrogeology Science Center reports that the rover’s samples of dune sand were deposited onto the surface, “but it appears that the sample was partly blown by the wind.” There is enough sample left to investigate with various rover instruments, he adds.
Looking ahead, the Curiosity Sol 1253 plan begins with Chemistry & Camera (ChemCam) passive spectra observations, as well as Mastcam multispectral observations of the dump piles and a recently brushed spot on Mars, Herkenhoff reports.
Sieved, unsieved sand
Later that sol, the Mars Hand Lens Imager (MAHLI) is slated to take pictures of the Alpha Particle X-Ray Spectrometer (APXS) calibration target and both dump piles prior to the APXS is placed on the pile of sieved sand for appraisal.

Curiosity Navcam Left B image, taken on Sol 1251, February 12, 2016.
Credit: NASA/JPL-Caltech
The APXS measures the abundance of chemical elements in rocks and soils.
After sunset, Herkenhoff says that the APXS will be moved to a bedrock target named “Bergsig” then to the pile of unsieved sand for a long, overnight stint of data gathering.
Surface frost
The rover is scheduled to wake up before dawn on Sol 1254 for an attempt to detect surface frost using ChemCam.
“This is the best time of year for water frost to form, so we’re hoping that ChemCam will see the hydrogen in the water,” Herkenhoff notes.
Later that sol, ChemCam and Mastcam will observe the unsieved dump pile and the brushed spot, this time using ChemCam’s laser to measure chemical composition.
“Mastcam will also image the frost target, the sun, and the distant crater rim to measure the amount of dust in the atmosphere,” says Herkenhoff. Then MAHLI will image Bersig, the sieved dump pile to look for the imprint of APXS’s contact sensor, and the brushed spot.

Curiosity ChemCam Remote Micro-Imager photo, snapped on Sol 1251, February 12, 2016.
Credit: NASA/JPL-Caltech/LANL
Overnight, the robot’s Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) is scheduled to analyze the dune sand again, to improve the accuracy of the mineralogical measurement.
Drive northward
On Sol 1255, Herkenhoff says that the rover planning calls for the machinery to drive toward the north, to get around the sand dune to the west of the vehicle. In addition to the usual post-drive imaging, the Navcam will take a couple images of Mount Sharp to enable planning of future long-distance imaging.
Overall, it’s another full plan for using Curiosity that has kept the tactical team busy, Herkenhoff concludes.

At the Baikonur cosmodrome, Kazakhstan, a specialist from Airbus Defense and Space (Aquitaine) places an insulation tile on the exterior of Schiaparelli, the ExoMars entry, descent, and landing demonstrator module.
Credit: ESA – B. Bethge
Progress is being made on readying for liftoff next month of the European Space Agency’s 2016 ExoMars mission/
That mission to be launched via a Proton booster includes a Trace Gas Orbiter (TGO) and an Entry, Descent and Landing Demonstrator Module (EDM).
Schiaparelli is the name of that entry, descent and landing demonstrator module.
Finishing touches
ESA reports that the finishing touches are being made to the protective heat shield of Schiaparelli before it is joined to the Trace Gas Orbiter.
Given a successful launch in Mars, Schiaparelli will plunge through the Martian atmosphere in October of this year and experience very high temperatures.

The entry, descent and landing demonstrator module, Schiaparelli, is part of ESA’s ExoMars 2016 mission. Schiaparelli is shown in its surface configuration after descent through the Martian atmosphere.
Credit: ESA/ATG medialab
Tile work
For most of the descent, a front heat shield and a rear cover will protect the module.
The front shield is a carbon sandwich structure covered with 90 insulating tiles. These tiles are made of Norcoat Liège, a thermal ablative material composed of resin and cork.
A team of specialists from Airbus Defense and Space (Aquitaine), who arrived in Baikonur last week, are now busy placing and sealing the last of the tiles on Schiaparelli’s heat shield and rear cover.

The Schiaparelli surface payload, based on the proposed DREAMS (Dust Characterisation, Risk Assessment, and Environment Analyser on the Martian Surface) package, consists of a suite of sensors to measure the wind speed and direction (MetWind), humidity (DREAMS-H), pressure (DREAMS-P), atmospheric temperature close to the surface (MarsTem), the transparency of the atmosphere (Solar Irradiance Sensor, SIS), and atmospheric electrification (Atmospheric Radiation and Electricity Sensor; MicroARES).
Credit: ESA/ATG medialab
The final launch preparation activities for Schiaparelli are drawing to a close.

Credit: NASA/Langley Research Center
Under the space radar screen is “Homesteading in Space – Inspiring the Nation through Science Fiction.”
Today at the California NanoSystems Institute/ UCLA in Los Angeles, California, the White House Office of Science and Technology Policy (OSTP) co-sponsored a look at humanity’s space future.
Sci-fi/fact
Roughly 70 space scientists, engineers, entrepreneurs, along with story-tellers, artists, directors, and producers met to show their interest in science fiction and space exploration with a view toward future “homesteading” in space.
Other co-sponsors were the National Academy of Sciences, Science & Entertainment Exchange, and the Museum of Science Fiction.
The California NanoSystems Institute (CNSI) is an integrated research facility with locations at UCLA and UC Santa Barbara. Its mission is to encourage university collaboration with industry and to enable the rapid commercialization of discoveries in nanoscience and nanotechnology.
Heady gathering
The intent of the heady gathering was to gather stories that will energize the public, inspire children to pursue Science, Technology, Engineering, Math (STEM) careers.
But a key add-on: help make science fiction become science fact.
Interactive discussions were held, each focused on specific areas of future science and technology related to how we can travel to and live on Mars and ultimately beyond.
Also on tap is how to include the future technologies needed to “homestead” in space.

What’s the view into the future?
Credit: NASA
Technology topics
Technical experts were divided between the following five future technology topics:
— Exploring Space: How will we leave the earth and travel to other planets?
— Prospecting: How will we find and collect chemicals and minerals from asteroids and other planets?
— Manufacturing: How will we make the materials and manufacture the things we need to build a community on another planet?
— Bioengineering: How will we use biotechnology, including synthetic biology, to create food, fuel, and useful chemicals using engineered bacteria and plant life?
— World Building: How will we not only survive but thrive in space, creating communities and maintaining our physical and mental health?
White House role
Making use of all media — novels, short stories, design fiction, new media, video, film, TV, VR, gaming, etc. – the gathering was focused on using science fiction to express positive, entertaining views of a future “homesteading” in space.

Credit: OSTP
The White House OSTP role was to ascertain what steps the government and the private sector can take to:
— further inform the creative community about a positive vision of a future in space; and
— encourage people to incorporate this vision into entertaining stories that will excite the public, energize entrepreneurs, and motivate inspire children.

Incoming! Who ya going to call?
A Planetary Impact Emergency Response Working Group (PIERWG) Charter has been developed.
Credit: NASA
A partnership between the U.S. Federal Emergency Management Agency (FEMA) and NASA is in place “to develop guidance to prepare for any potential impact of our planet by a large natural object.”
A Planetary Impact Emergency Response Working Group (PIERWG) Charter was signed in August 2015 and is now available for public viewing here at:
http://www.nasa.gov/sites/default/files/atoms/files/signed_pierwg_charter_10212015.pdf
Unique threat
The Charter notes that “the risks are inherently unique and there are currently no national policy covering this particular threat.”
Spelled out in the Charter is the framework for the structure and processes of an interagency team focused on preparation for a predicted or actual impact of an asteroid or comet that could affect the United States or its territories.
The Charter details the roles, responsibilities, and membership of the PIERWG.
Coordinating agencies
The objective of the PIERWG provides a forum for affected U.S. Departments and Agencies to develop the essential information and recommendations needed by senior leadership to make informed decisions to respond to the “unique challenges” of an impending NEO impact.
![]()
PIERWG coordinating agencies include the White House Office of Science and Technology Policy, the Department of Homeland Security-Science and Technology, as well as Department of Defense, and the Department of State’s Office of Space and Advanced Technology.
Approving the document is Damon Penn, Assistant Administrator of the Response Directorate of FEMA and NASA’s James Green, Director of the Planetary Science Division.
New NASA office
In early January, NASA announced the establishment of a Planetary Defense Coordination Office (PDCO) created to coordinate U.S. agencies and intergovernmental efforts to respond to future near-Earth objects that threaten Earth.
![]()
For details of NASA’s new office, go to:
NASA’s New Planetary Defense Office Gets to Work Protecting Earth
http://www.space.com/31770-nasa-planetary-defense-office-asteroid-threat.html

Curiosity Sol 1248 image taken by the robot’s Mastcam Left camera on February 9, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now in Sol 1249.
Mars researcher, Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff explains that the rover has traversed roughly 8 miles (12 kilometers) since landing in August 2012, and another drive is planned for Sol 1249.
Curiosity Navcam Left B image taken on Sol 1249, February 10, 2016.
Credit: NASA/JPL-Caltech
“The tactical planning team decided to forgo targeted remote science observations before the drive to allow more time for driving,” Herkenhoff adds. “The goal is to get the vehicle to a location that will allow the remaining dune sample to be dumped and examined in detail this weekend, and this will require more drive time than originally planned.”
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Curiosity was designed to assess whether Mars ever had an environment able to support small life forms called microbes. In other words, its mission is to determine the planet’s “habitability.”
Dude of the dune
The nuclear powered robot’s dune-investigation campaign is adding to appreciating how wind moves and sorts grains of sand, in an environment with less gravity and much less atmosphere than well-studied dune fields on Earth.

Nuclear power system is shown in this Curiosity Navcam Right B image, taken on Sol 1249, February 10, 2016
Credit: NASA/JPL-Caltech
Curiosity has not caught a sand slide in action.
However, the rover’s images of the Namib Dune slip face show where such slides have occurred recently. These dunes likely are most active in Mars’ southern summer, rather than in the current late-fall season.
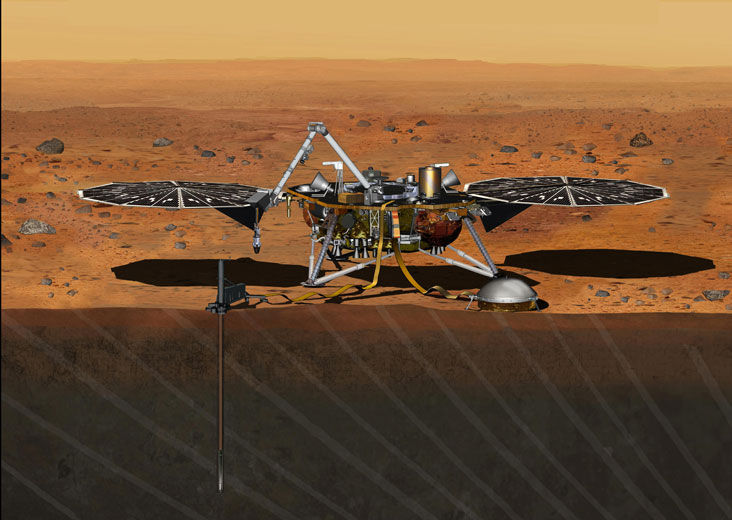
InSight Mars lander.
Credit: NASA/JPL
NASA’s InSight Mars lander is now safely back at its maker – Lockheed Martin Space Systems in Littleton, Colorado.
The spacecraft was successfully shipped back from Vandenberg Air Force Base to Denver on Saturday, Feb. 6. Its “return to sender” flight was onboard a C-17 aircraft from Vandenberg AFB to Buckley AFB.
InSight is currently housed in the Waterton Canyon campus in Littleton, Colorado company spokesman, Gary Napier, told Inside Outer Space.

A crate containing NASA’s Mars-bound InSight spacecraft was loaded into a C-17 cargo aircraft at Buckley Air Force Base, Denver, for shipment to Vandenberg Air Force Base, California. The spacecraft, built by Lockheed Martin Space Systems, was shipped Dec. 16, 2015, for launch in March 2016. The spacecraft is now back at Lockheed Martin due to launch delay.
Credit: NASA/JPL-Caltech/Lockheed Martin
Seismic experiment
NASA decided to suspend the planned March 2016 launch of the Discovery-class Interior Exploration using Seismic Investigations Geodesy and Heat Transport (InSight). The launch scrub was due to unsuccessful attempts to repair a leak in a section of the prime instrument in the lander’s science payload.
The problem-plagued instrument was the sensitive Seismic Experiment for Interior Structure (SEIS).
SEIS is designed to take precise measurements of quakes and other internal activity on Mars to better understand the planet’s history and structure.

Pre-ship photo shows NASA’s InSight Mars lander spacecraft in a Lockheed Martin clean room near Denver. As part of a series of deployment tests, the spacecraft was commanded to deploy its solar arrays in the clean room to test and verify the exact process that it will use on the surface of Mars.
Credit: NASA/JPL-Caltech/Lockheed Martin
Leak problems
The SEIS had previously failed to retain vacuum conditions – a problem that was fixed. But during follow-up tests in extreme cold temperature (-49 degrees Fahrenheit/-45 degrees Celsius) another leak was detected.
Despite the repairs and the significant efforts of InSight teams, a cold pressure build-up, probably caused by a new leak, was detected on the sphere-shaped SEIS.
NASA officials determined there was insufficient time to resolve another leak, and complete the work and thorough testing required to ensure InSight’s mission.
Core sensors
“The thing that was leaking was the vacuum enclosure of the VBBs (Very Broad Band seismometers), which are the core sensors of the SEIS,” explains W. Bruce Banerdt Principal Investigator for InSight at the Jet Propulsion Laboratory (JPL) in Pasadena, California.
Credit: NASA/JPL
“We call it the ‘sphere’… although it is only quasi-spherical,” Banerdt told Inside Outer Space. “JPL and the French have been working shoulder to shoulder — both literally and figuratively — since the first leak was detected at the end of August,” he adds.
Along the same lines, teams are jointly putting together a plan forward, Banerdt notes, for producing a robust vacuum enclosure for the presumed launch of InSight in 2018.
Resources:
For more information on the SES, go to this video in French at:
https://www.youtube.com/watch?v=k3IOKszmnyo
For an English video on InSight, go to:

Credit: NASA/JPL-Caltech/MSSS
The folks at the Jet Propulsion Laboratory are offering your own controllable view of a full-circle panorama beside “Namib Dune” on Mars. The Curiosity mission’s examination of dunes in the Bagnold field, along the rover’s route up the lower slope of Mount Sharp, is the first close look at active sand dunes anywhere other than Earth.
The Curiosity rover-provided view shows the downwind face of Namib Dune on Mars that covers 360 degrees, including a portion of Mount Sharp on the horizon.
The site is part of the dark-sand “Bagnold Dunes” field along the northwestern flank of Mount Sharp.
The component images of the scene were taken on Dec. 18, 2015 by the Mast Camera (Mastcam) on the robot.
The bottom of the dune nearest the rover is about 23 feet (7 meters) from the camera. This downwind face of the dune rises at an inclination of about 28 degrees to a height of about 16 feet (5 meters) above the base. The center of the scene is toward the east; both ends are toward the west.
A color adjustment has been made approximating a white balance, so that rocks and sand appear approximately as they would appear under Earth’s sunlit sky.
The mission’s examination of dunes in the Bagnold field, along the rover’s route up the lower slope of Mount Sharp, is the first close look at active sand dunes anywhere other than Earth.
Malin Space Science Systems, San Diego, built and operates the rover’s Mastcam.
Go to:

