Archive for January, 2017

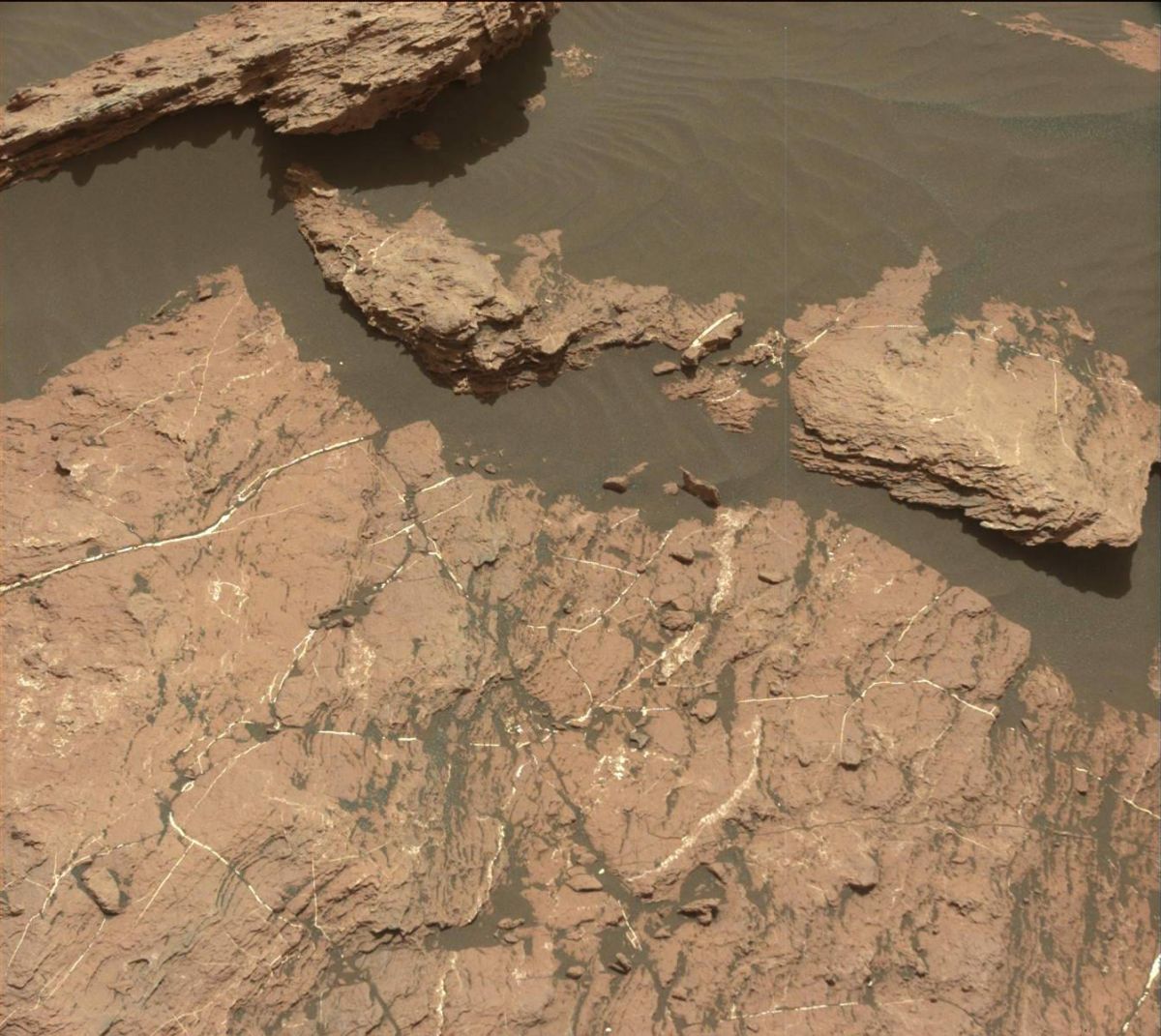
Curiosity Mastcam Left image taken on January 18, 2017.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now at work on its Sol 1587 agenda.
The robot drove 43 feet (13 meters) back on Sol 1585, placing the Mars machinery in a good position for contact science.
“But the telemetry also showed that ChemCam [Chemistry & Camera] had been marked ‘sick,’ so we will not be able to use ChemCam this weekend while the problem is diagnosed,” notes Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Full weekend plan
Sol 1586’s plan called for the rover’s Right Mastcam to acquire small mosaics of nearby rocks named “Bell Brook,” “Blind Brook,” and “Beck Pond,” then Left Mastcam is slated to take another image of the rover deck to look for changes in the dust and sand on the deck.

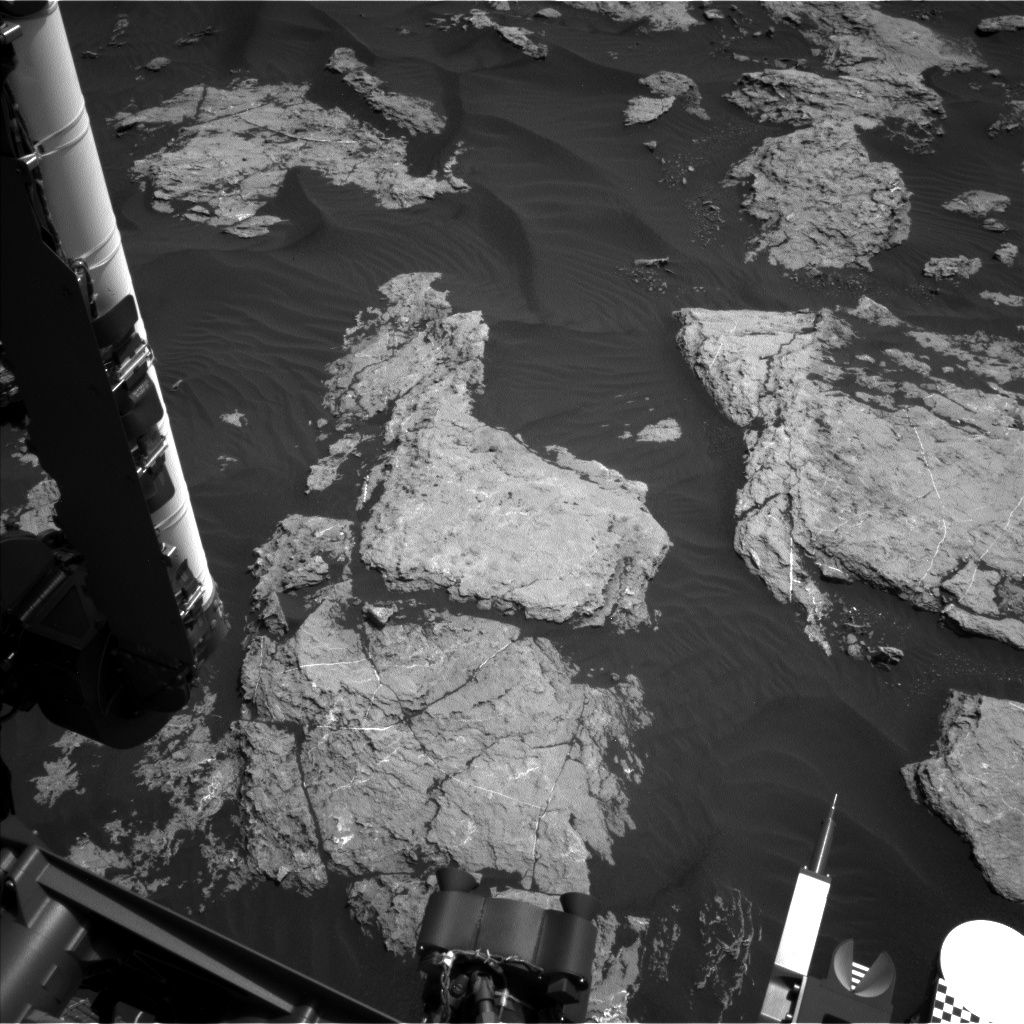
Curiosity Navcam Left B image taken on Sol 1586, January 21, 2017.
Credit: NASA/JPL-Caltech
The rover was scheduled to rest until late that afternoon, when the illumination will be good for Mars Hand Lens Imager (MAHLI) photo taking.
MAHLI is to take a single image before the Dust Removal Tool (DRT) is used to brush off a bedrock target dubbed “Belle Lake,” then take a full suite of images (plus extra stereo images) of the brushed spot.
MAHLI is to also acquire a full suite of images of another bedrock target called “Bluffer Pond” before the Alpha Particle X-Ray Spectrometer (APXS) to be placed on the same target for a short integration.
Just before midnight, the APXS is to be placed on Belle Lake for a longer integration.
Multispectral set of images
Herkenhoff adds that on Sol 1587, the arm will be retracted and stowed to allow Mastcam to acquire a full multispectral set of images of Belle Lake.
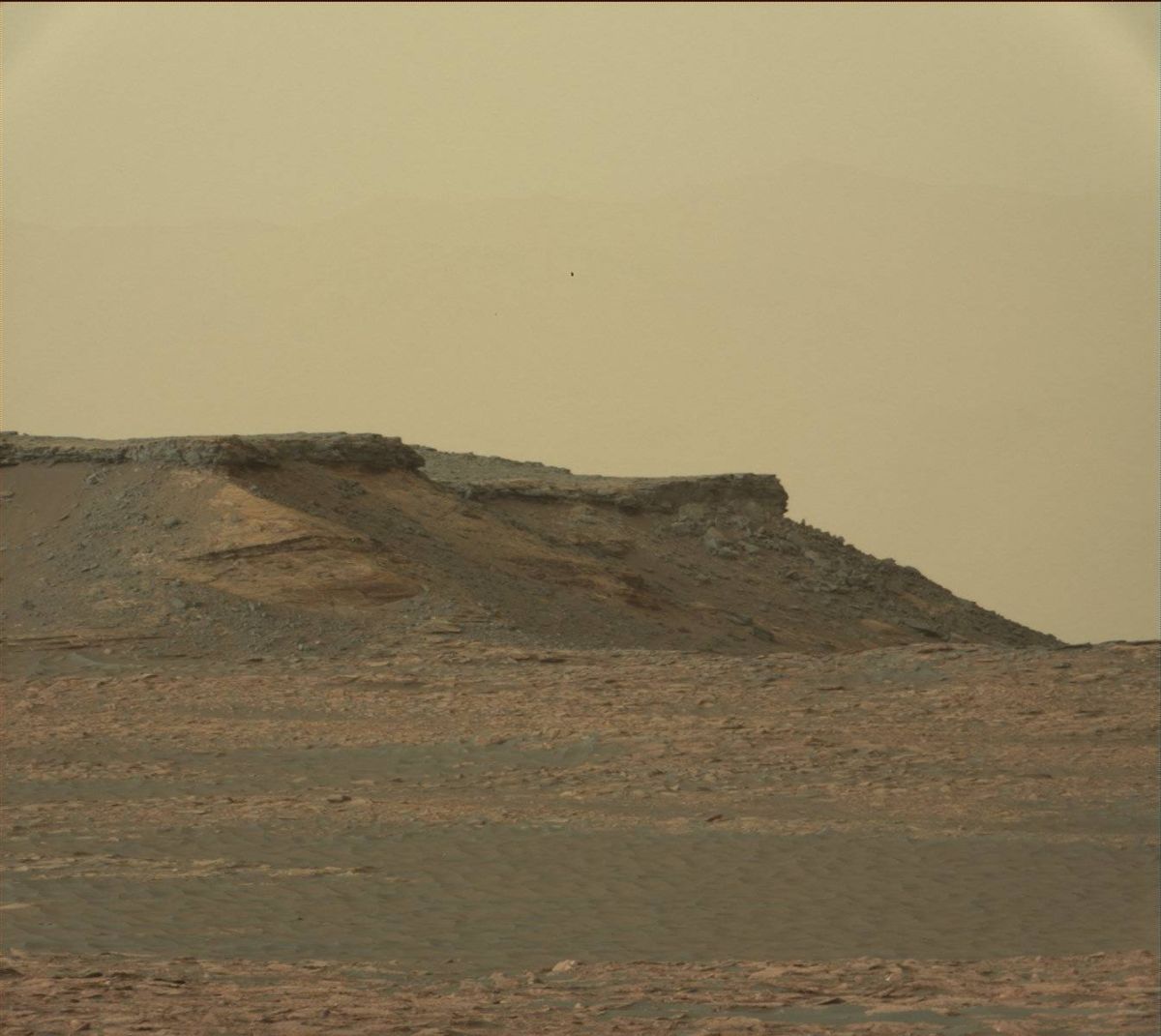
Curiosity Mastcam Left image taken on Sol 1585, January 20, 2017.
Credit: NASA/JPL-Caltech/MSSS
Navcam is to search for dust devils before the next drive. In addition to the standard post-drive activities, the arm will be unstowed to allow Navcam to take stereo images of the new arm workspace.
Curiosity’s Mars Descent Imager (MARDI) is slated to take images during twilight on Sols 1587 and 1588 to look for any changes due to winds.
Navcam is scheduled to again search for dust devils on Sol 1588, and the robot’s Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) is on tap to perform some maintenance activities overnight.
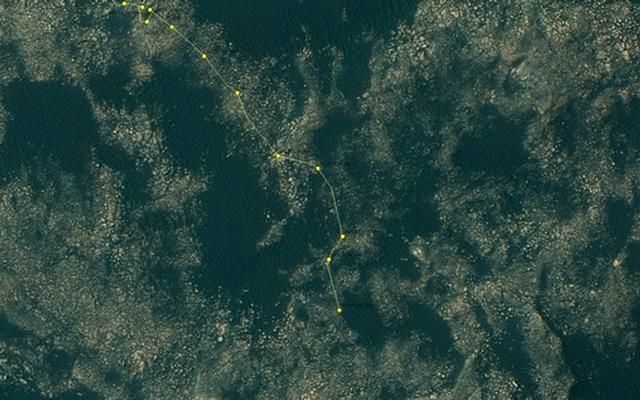
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-CALTECH/Univ. of Arizona
Straight line distance
In a map release of January 19, Curiosity’s Location for Sol 1584 shows that the robot has driven a straight line distance of about 101.10 feet (30.82 meters) from Sol 1583 to Sol 1584.
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 9.48 miles (15.26 kilometers) as of Sol 1584.

Credit: TeamIndus
Moonshine – space exploration style!
A team of University of California San Diego (UCSD) engineering students is in ferment – all hopped up to see if beer can be brewed on the Moon.
Their experiment is designed to test the viability of yeast on the Moon. The brewmasters stem from UCSD’s Jacobs School of Engineering calling themselves “Team Original Gravity.”
They are one of 25 teams selected from a pool of several thousand entries to compete for a spot aboard a moonbound lander/rover planned for launch on Dec. 28, 2017.
TeamIndus
The spacecraft is owned by the Indian startup TeamIndus, an industrious Indian group competing for the Google Lunar XPRIZE and a $30 million purse. To win, a privately funded team must successfully place a robot on the Moon that explores at least 1,640 feet (500 meters) and transmits high-definition video and images back to Earth.

Credit: TeamIndus
TeamIndus has secured a launch contract from the Indian Space Research Organization (ISRO) for a booster flight.
TeamIndus invited experiment ideas from researchers under 25 years of age to imagine, design and build an experiment that will help humankind build sustainable life on the Moon.
Shortlisted experiments
In Phase-I of the “Lab2Moon” challenge, participants were asked to send in a concept note and video of their idea. That generated 3,000 entries from 15 countries and 300+ cities across the globe.
The competition then entered Phase-II in which 25 teams were shortlisted to build prototypes of their concept to showcase to an international jury of experts in March at the finals in Bangalore. Teams from India, Peru, Mexico, USA, UK, Spain and Italy made it to the list.
Other proposed experiment ideas include: radiation shielding using bacteria; effect on plant growth in lunar regolith; lunar sintering of lunar soil; inflatable dome testing; as well as a lunar gene bank for endangered species.

Brewmasters, Johnny Koo, Jared Buchanan, Han Lu Ling, Neeki Ashari, Srivaths Kalyan, and Tavish Traut.
Credit: Erik Jepsen/UC San Diego Publications
ALEiens!
In a UCSD press statement, Neeki Ashari, a fifth year bioengineering student at UC San Diego and the team’s PR & Operations Lead: “We all appreciate the craft of beer, and some of us own our own home-brewing kits. When we heard that there was an opportunity to design an experiment that would go up on India’s moonlander, we thought we could combine our hobby with the competition by focusing on the viability of yeast in outer space.”

ALEiens technology by Team Original Gravity.
Credit: Erik Jepsen/UC San Diego Publications
Understanding how yeast behaves on the Moon to brewing beer in space is just one application. It’s also important for the development of pharmaceuticals and yeast-containing foods, like bread, Team Original Gravity points out. “The symbiotic relationship between humans and yeast would no doubt be vital for future colonization of the Moon and other planets.”
To view the UCSD Astrobiology Club’s submission for Lab2Moon, go to:’
https://www.youtube.com/watch?v=rxkeDwJLo_A
For more information on TeamIndus, go to:

International Space Station as it flies in front of the Moon as seen from ESA’s space science center near Madrid, Spain, on January 14.
Credit: ESA
Observers on Earth have imaged both the International Space Station as well as China’s now un-crewed Tiangong-2 space lab.
The ISS outpost is the largest structure in orbit, spanning the size of a football pitch, but at 400 km altitude it still appears tiny through a telescope.
Sequence of images
Michel Breitfellner, Manuel Castillo, Abel de Burgos and Miguel Perez Ayucar work at the European Space Agency’s (ESA) European Space Astronomy Center and are members of its astronomy club.
The sky watchers braved freezing temperatures to set up two telescopes with reflex cameras to record a sequence of images as the ISS crossed the face of the Moon.
As the Station could be seen only when in front of the Moon, the group had to press the shutter and hope for the best. “Their calculations were perfect and the result speaks for itself,” notes an ESA statement on the astrophotography.

China’s Tiangong-2 space lab.
Credit: Mariano Ribas
China’s space lab
Meanwhile, satellite sleuth Mariano Ribas from Buenos Aires, Argentina has also released some new imagery of the ISS, as well as China’s Tinagong-2 space lab.
The Chinese space lab was visited late last year by the two-person Shenzhou-11 crew: Jing Haipeng, crew commander and a third-time space traveler, and Chen Dong, a first-time space traveler.

Credit: Mariano Ribas
The two astronauts lived for 30 days onboard Tiangong-2 before returning to Earth – the longest time Chinese astronauts have spent in space and a prelude to that country’s building of a permanent space station in the 2020s.
Cargo spacecraft
In related news from China, the Xinhua news agency has reported that the country’s first cargo spacecraft – the Tianzhou-1 — is set leave its factory site. The Tianzhou-1 cargo spacecraft has met all the requirements to leave the factory, Xinhua has noted.
The take-off weight of Tianzhou-1 is 13 tons and can contain up to 6 tons of material for docking with the Tiangong-2.

Chinese supply ship — Tianzhou-1 — undergoing pre-flight checks.
Credit: CMSA
That automated spacecraft is to be launched in April from the southern province of Hainan, then dock with the Tiangong-2 space lab and refuel the facility.
Doing so will signal an important step for China in building a space station in the 2020s. These cargo ships are required to transfer necessities from Earth for astronauts aboard the space station.

Opportunity Front Hazcam image taken on Sol 4616.
Credit: NASA/JPL
Two NASA rovers are busily working on the Red Planet – Opportunity and the Curiosity robots.
“Opportunity is mainly traversing uphill to the southwest on Cape Tribulation, trying to get back to the Meridiani Plains to head south to Cape Byron and the top of a gully system before the end of the southern summer.”
That’s the word from Ray Arvidson of Washington University in Saint Louis. He is deputy principal investigator of the rover mission.

Opportunity Navigation Camera image taken on Sol 4616.
Credit: NASA/JPL
Steady progress
Opportunity’s health is steady, Arvidson told Inside Outer Space, although climbing 15 to 20 degree slopes is difficult, he said.
“But steady progress is being made. We are characterizing the Shoemaker formation impact breccia outcrops along the climb uphill,” Arvidson said.
The robot airbag bounced to full stop in Meridiani Planum on January 25, 2004.
As of Sol 4609 (Jan. 10, 2017), the rover’s total odometry was 27.20 miles (43.77 kilometers).
“Frost Pond” can be seen in the middle of this image. Photo taken by Curiosity Navcam Left B Sol 1583, January 18, 2017.
Credit: NASA/JPL-Caltech
Frost Pond
Elsewhere on Mars, the Curiosity rover is also at work, performing Sol 1584 duties.
On Sol 1583 Curiosity drove 52 feet (16 meters), a trek that set up touch-and-go contact science.
As scripted, the plan for the Mars robot is to start with a short Alpha Particle X-Ray Spectrometer (APXS) integration on the target “Frost Pond.”
Curiosity Mastcam Right image taken on Sol 1580, January 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
The intent is to investigate the chemistry of a typical Murray bedrock block, reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona. Then the plan calls for a full suite of Mars Hand Lens Imager (MAHLI) images to be taken on the same target.
Search for dust devils
Later in the plan is acquiring a Chemistry& Camera (ChemCam) observation of “Frost Pond” for comparison, and also taking a Mastcam image for documentation.
Curiosity Navcam Left B, Sol 1583 January 18, 2017.
Credit: NASA/JPL-Caltech
“We’ll also acquire a small Mastcam mosaic of “Burnt Brook” to investigate some color variations and a Navcam observation to search for dust devils,” Edgar adds.

Curiosity Mastcam Right image taken on Sol 1580, January 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
“After another drive, we’ll take post-drive imaging for targeting. Later in the afternoon we’ll use Mastcam to monitor the movement of fines on the rover deck and take a systematic clast survey,” and ChemCam will take another Autonomous Exploration for Gathering Increased Science (AEGIS) observation, Edgar concludes.
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Odd object imaged by Curiosity’s Mastcam Right image taken on Sol 1577, January 12, 2017. Now confirmed as iron-nickel meteorite.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover has indeed found another iron-nickel meteorite, now called “Ames Knob,” on the surface of the Red Planet.
As reported earlier on Inside Outer Space, the object spotted by the robot is mostly iron, some 90 percent iron with a small amount of nickel, says Roger Wiens, Curiosity’s Chemistry & Camera (ChemCam) principal investigator for the Mars Science Laboratory rover effort at Los Alamos National Laboratory in New Mexico.
Laser shots
“Yes, indeed, we did a brief compositional analysis of Ames Knob with ChemCam, with just three laser locations,” Wiens told Inside Outer Space.

Credit: NASA/JPL-Caltech
In October 2016 the rover found a similar iron-nickel meteorite dubbed “Egg Rock.”
Wiens said: “While one observation point of Egg Rock showed the presence of phosphorous, we did not observe any of this element in Ames Knob. It is still likely that Ames Knob is the same meteorite type and may have fallen at the same time as Egg Rock.”
4th find by Curiosity
Ames Knob is approximately 4 x 6 inches in size (10 x 14 centimeters), Wiens adds. “On Earth it would weigh about 0.8 kg or a little less than 2 pounds. We observed it from about 10-feet (3.4 meters) distance.”
It is the 4th meteorite to be found by the Curiosity rover, Wiens pointed out.
The third one, Egg Rock, was found and analyzed by ChemCam on sol 1505. It was somewhat smaller, at about 5 cm diameter. The first two meteorites, Lebanon and Littleton, were both quite large, at over 1 meter in length, and were imaged around sol 634, a little less than 5 kilometers [3 miles] from where the rover is now, Wiens pointed out.

October 30, 2016 image taken by Curiosity on Sol 1505. This iron-nickel meteorite was dubbed “Egg Rock.”
Falling on land…or water?
“All of these are iron meteorites,” Wiens notes, “are relatively easy to distinguish from the Mars rocks.”
The pre-Curiosity Mars Exploration Rover (MER) – Spirit and Opportunity — also found several meteorites on Mars.
“We hope that meteorites will be able to tell us some information about the Mars environment, such as whether they fell on land or in water, or how dense the atmosphere was when they fell,” Wiens explains.

Mars: Our Next Home?
Courtesy: Mars City Design
Want To Live On Mars, Or Saturn’s Moon? Space Settlements May Be Closer Than We Think
Settlers on Mars could mine ice to build 3D printed igloos.
A bit farther out, on one of Saturn’s moons, residents might strap on wings, flap their arms, and fly.
These are the visions of two authors who joined Colorado Matters at the Newman Center for the Performing Arts at the University of Denver to talk about the future for colonies in space.

Colorado Matters’ host Ryan Warner, left, discusses the future of space settlements with Amanda Hendrix, Leonard David, and Andrzej Stewart in front of a live audience at the Newman Center at the University of Denver.
(Irvin Coffee/Colorado Public Radio)
Sending people to Mars is within the grasp of science today, says Leonard David, an award-winning space journalist from Golden. His book — “MARS: Our Future on the Red Planet” — came out in conjunction with the new “Mars” miniseries on National Geographic Channel.
Amanda Hendrix, senior scientist at the Planetary Science Institute in Niwot, looks a bit farther to find a suitable home in space: Titan, the largest of Saturn’s 62 moons. She says Titan has a thick atmosphere that would allow people to walk outside without pressurized suits, and lakes of methane that could be used for fuel. Hendrix is co-author of “Beyond Earth: Our Path to a New Home in the Planets.”

Leonard David, author of “Mars: Our Future on the Red Planet” with Andrzej Stewart, who spent a year living in a NASA-sponsored Mars simulation habitat in Hawaii.
(Irvin Coffee/Colorado Public Radio)
Aerospace engineer Andrzej Stewart joined the two authors to talk about his experience living for a year in a NASA-sponsored Mars simulation habitat in Hawaii.
Story written by Nell London, Colorado Public Radio
January 17, 2017
Go to:
Colorado Public Radio/Colorado Matters
Want To Live On Mars, Or Saturn’s Moon? Space Settlements May Be Closer Than We Think
Also, go to:
COLORADO MATTERS PODCAST
A Night On Mars And Titan: Colorado Authors Look To The Planets
BY RYAN WARNER
http://www.cpr.org/news/story/a-night-on-mars-and-titan-colorado-authors-look-to-the-planets

Credit: ASAP
A space watchdog group dedicated to aerospace safety has “yellow flagged” NASA’s Journey to Mars activity, noting that work underway lacks substantive risk reduction, technology maturation, and advanced systems development to achieve stated objectives.
The Aerospace Safety Advisory Panel (ASAP), an advisory committee that reports to NASA and Congress, has issued its 2016 annual report examining NASA’s safety performance over the past year.
NASA’s humans-to-Mars plans are in yellow condition – meaning that the panel is not confident that important issues or concerns are being addressed adequately by the space agency.
Wanted: Mars czar
The safety group has recommended to NASA the establishment of a Mars Mission Program Office and/or designation of a “Mars Czar” that could facilitate the completion of the needed trade studies and ensure that limited funds are being spent on the appropriate technical challenges.
“NASA has made some progress in defining the Journey to Mars, but in the opinion of the Panel, current plans lack substantive risk reduction, technology maturation, and advanced systems development to achieve the stated goals,” the ASAP report explains.

Credit: Bob Sauls – XP4D/Explore Mars, Inc. (used with permission)
Establishing a Mars Program Office could facilitate these efforts. “We encourage NASA to take advantage of potential commercial and/or international activities to create a more robust exploration architecture,” the report states.
For NASA’s Journey to Mars, the goal is to be able to send astronauts to the vicinity of the Red Planet or its moons sometime during the 2030s. Whether this would involve a fly-by, an extended period in Mars orbit, a landing on Phobos or Deimos (the two moons of Mars), or actual “boots on the ground” on the Red Planet has not yet been determined.
Current plans: fragile
Also flagged in the ASAP report is concern regarding NASA’s Space Launch System (SLS) – a booster with a lift capability of 130 tons. Even with that SLS lift capacity, there would be a need for multiple launches per mission potentially augmented with the use of other vehicles such as the Evolved Expendable Launch Vehicle.
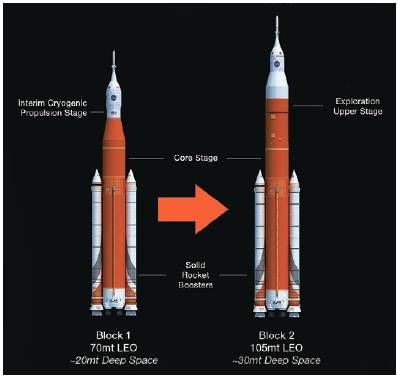
SLS configurations.
Credit: ASAP/NASA
With notional NASA out-year budgets assuming one SLS launch per year, plus the long trip times involved (800 to 1,100 days away from Earth), the report explains that current plans to carry out the Journey to Mars appear to be somewhat “fragile.”
“Since SLS would carry the most critical items into deep space, a delay or technical failure on a single launch could significantly impact the entire mission. This should make reliability a high priority for SLS,” the report adds.
Back to the Moon
One option to address this issue, according to the ASAP, would be to take advantage of potential commercial and/or international activities to create a more robust exploration architecture. These commercial and international partnerships could also potentially provide opportunities for NASA to test technologies and systems on the lunar surface.
“Even if NASA chooses not to take a leadership role in human missions to the Moon, there may be other opportunities to gain valuable experience—with large landers and ascent vehicles, with the operation of systems for in-situ resource extraction, with large-scale habitation systems, and with the long-term impact of dust on space suits and other mechanical systems.”

Moon-first approach as precursor to humans to Mars.
Credit: NASA
Lunar surface testing
The report explains that, just as the International Space Station is a valuable platform for testing advanced exploration systems in microgravity, the Moon’s surface offers “an analogous opportunity” for risk reduction and testing of surface systems that will operate in a challenging partial-gravity environment.
“Testing these systems first on the Moon,” the ASAP concludes, “could help to increase the robustness of the overall space infrastructure, enhance the cislunar space economy, and increase the safety of the Mars missions themselves.”

Just as the International Space Station is a valuable platform for testing advanced exploration systems in microgravity, the Moon’s surface offers “an analogous opportunity” for risk reduction and testing of surface systems.
Credit: ASAP/NASA
Report highlights
The 2016 report highlights activities of 2016 and includes assessments of the agency’s:
Enterprise information technology protection
Commercial Crew Program
Deep space exploration
International Space Station operations, and
Aeronautics missions and air operations
To read over the entire Aerospace Safety Advisory Panel (ASAP) 2016 report, go to:
https://oiir.hq.nasa.gov/asap/documents/2016_ASAP_Annual_Report.pdf

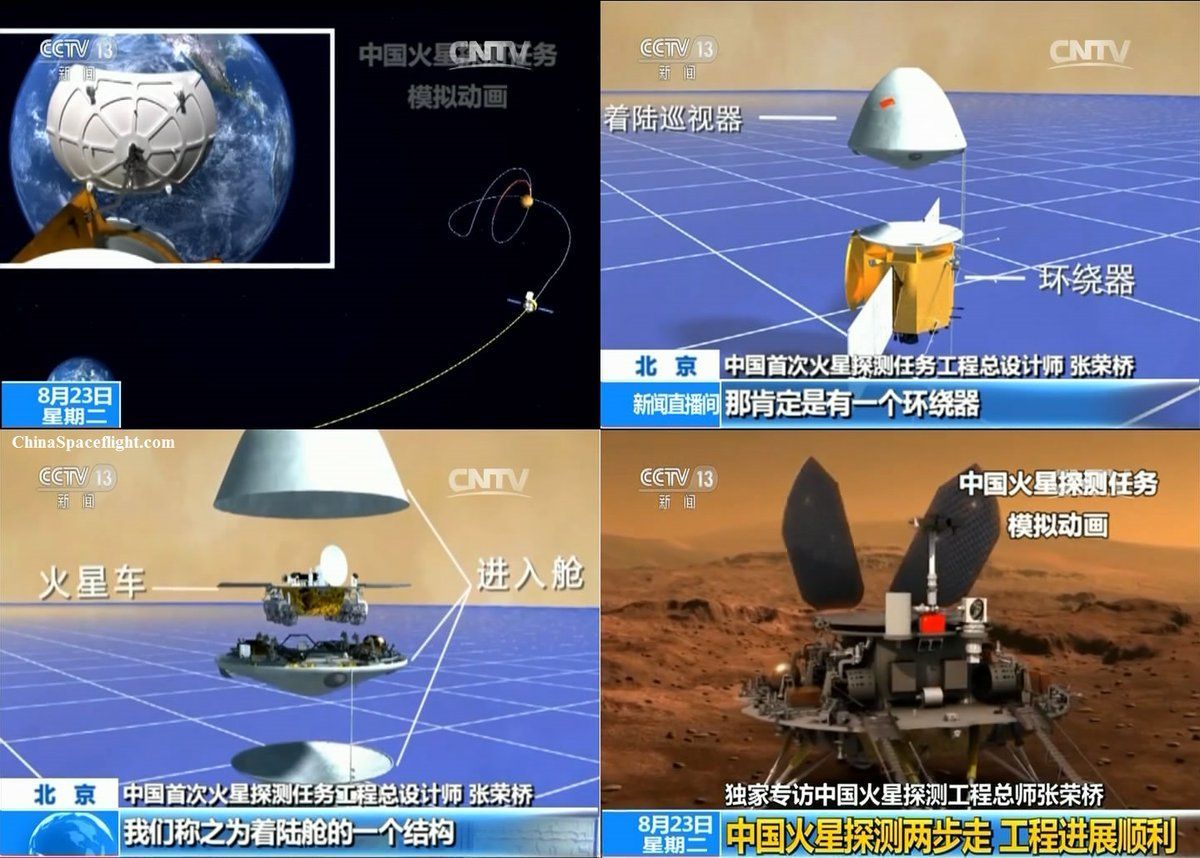
Credit: CCTV America
Judges in China are sifting through thousands of names and logo artwork for the country’s first Mars exploration project, slated for launch in 2020.
The judging panel consisting of academicians in the field of China’s lunar and deep space exploration, space engineering experts and artists have chosen eight names and eight logos after preliminary assessments.
The eight names listed by CCTV-Plus are: Fenghuang (phoenix), Tianwen (study of heaven), Huoxing (Mars), Tenglong (flying dragon), Qilin (Kylin), Zhuque (a legendary bird), Zhuimeng (chasing dreams) and Fengxiang (flying phoenix).
These names will be placed on Xinhuanet and QQ.com for online voting and the final result will be published around April 24 – China’s Space Day.
Credit: CCTV America
Received and sorted
The process of collecting the names and logos started on Aug. 23, 2016 and ended 80 days later.
The websites of the China National Space Administration and China’s Lunar and Deep Space Exploration received and sorted out the names and logos coming from China as well as other countries and regions.
“We have collected over 35,000 names and over 7,000 logos for the project. Their design covers a wide area, including the humanistic spirit, the exploration spirit, and the culture of the Chinese nation,” said Liu Jizhong, deputy chief commander of China’s first Mars exploration project in a CCTV-Plus interview.
Go to this video for a preview of China’s mission to Mars:
https://www.youtube.com/watch?v=hdj8-XSOAg8
Credit: CCTV America
Odd object imaged by Curiosity’s Mastcam Right image taken on Sol 1577, January 12, 2017.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover has imaged an unusual object, possibly a meteorite. At first glance the find appears to be similar to an Iron-Nickel meteorite found by the robot back in October 2016.
Curiosity’s Mastcam Right image of the object was taken on Sol 1577, January 12, 2017.
The color, luster, and general morphology appears consistent with what has been seen on Mars for iron meteorites, says James Ashley a planetary geologist and science systems engineer in the Mars Program Office at the Jet Propulsion Laboratory, Pasadena, California.
“But I’m always struck by the differences — some subtle, some not so subtle – between the individual samples,” Ashley adds.
Ashley explains that his views are speculative. Also, he is not on the Mars Science Laboratory/Curiosity team.
October 30, 2016 image taken by Curiosity on Sol 1505. This iron-nickel meteorite was dubbed “Egg Rock.” Credit: NASA/JPL-Caltech/MSSS
Egg Rock
Back on October 30, 2016 Curiosity on Sol 1505 found the iron-nickel meteorite dubbed “Egg Rock” on the Murray Formation. That find, Ashley points out, brought the inventory of confirmed and candidate meteorites identified on the Martian surface to 22 finds.
Curiosity examined the golf-ball-size object with laser pulses and confirmed it to be an iron-nickel meteorite.
“Compare this rock to the previous meteorite identified by the Curiosity science team, Egg Rock, for example. That one has deep incisions that one can interpret as resulting from the differential erosion of its surface. That is a weathering feature that occurred post-fall, and is therefore giving you information on Martian surface processes,” Ashley told Inside Outer Space.
“Such things are of great interest to Mars science, particularly because they provide insight into recent surface processes,” Ashley notes. “The current rock, although probably weathered, might have arrived at its appearance from ablation processes during passage through the atmosphere. And that tells you very little about Mars surface processes, introducing ambiguity to the weathering discussion.”

This dark, golf-ball-size object was inspected by the Chemistry and Camera (ChemCam) instrument on NASA’s Curiosity Mars rover. Photo shows a grid of shiny dots where ChemCam had fired laser pulses used for determining the chemical elements in the target’s composition.
The analysis confirmed that this object, informally named “Egg Rock,” is an iron-nickel meteorite. Iron-nickel meteorites are a common class of space rocks found on Earth, and previous examples have been found on Mars, but Egg Rock is the first on Mars to be examined with a laser-firing spectrometer.
Credit: NASA/JPL-Caltech/LANL/CNES/IRAP/LPGNantes/CNRS/IAS/MSSS
Ashley concludes that if the newest object under review is a meteorite, “it is probably another iron, which have been offering some very interesting thoughts on survivability in the current Martian environment over time.”

Curiosity Navcam Left B image taken on Sol 1578, January 13, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is working through a roster of science duties on Sol 1579.
Rover scientists have put together a 4-sol plan following a drive of the robot of over 80-feet (25-meters) across the Red Planet’s landscape.

Curiosity Navcam Left B image taken on Sol 1578, January 13, 2017.
Credit: NASA/JPL-Caltech
“Curiosity is surrounded by more dark sand than usual, but there is enough rock exposed that we had a lot of science targets to choose from,” reports Ken Herkenhoff at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Given the upcoming holiday on Monday, a 4 sol plan has been scripted: Sols 1579-1582.

Curiosity Mastcam Right image taken on Sol 1577, January 12, 2017.
Credit: NASA/JPL-Caltech/MSSS
Laser zapping
The first sol will include only Rover Environmental Monitoring Station (REMS) atmospheric observations while the rover recharges after a Sample Analysis at Mars (SAM) Instrument Suite methane measurement the night before.

Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1578, January 13, 2017.
Credit: NASA/JPL-Caltech/MSSS
The Sol 1580 plan starts with Chemistry & Camera (ChemCam) passive (no laser) measurements of the sky and calibration targets.
“Then we’ll use the laser to zap rock targets “Oak Bay” and “Rockport” and take Right Mastcam images of them,” Herkenhoff notes.
Bedrock exposures
The rover’s Mastcam is also to acquire a mosaic of bedrock exposures just west of the rover, measure dust in the atmosphere, and take another image of the rover deck.
Later that afternoon, the plan calls for ChemCam and Right Mastcam observations of disturbed sand at “Kennebec,” an undisturbed ripple called “Spruce Top,” and bedrock targets named “Traveler” and “Mars Hill.”
Curiosity’s Right Mastcam is also to acquire a 3×1 mosaic of a more distant outcrop dubbed “Ogler Point.”
Odd object imaged by Curiosity’s Mastcam Right image taken on Sol 1577, January 12, 2017. Possibly new meteorite find?
Credit: NASA/JPL-Caltech/MSSS
Contact science
Herkenhoff reports that Sol 1581 is dominated by contact science, starting with a full suite of Mars Hand Lens Imager (MAHLI) images of Mars Hill.
MAHLI will also take close-up images of nearby “Camera Hill” and acquire a 3-image mosaic of the layered outcrop target “Small Falls.”
The Alpha Particle X-Ray Spectrometer (APXS) is to be placed on Camera Hill for a short integration, then on Mars Hill for an overnight integration.
Drive planned
On Sol 1582, Navcam will search for clouds and dust devils before the rover drives away.
Following the drive, the Autonomous Exploration for Gathering Increased Science software, AEGIS for short, will again be used to autonomously select a ChemCam target and acquire data, and the Mars Descent Imager (MARDI) is slated to take another image during twilight.
“Finally, the rover will get some well-earned rest overnight,” Herkenhoff concludes.

Curiosity Mars rover location as of Sol 1576.
Credit: NASA/JPL-CALTECH/Univ. of Arizona
New map
A new map has been issued showing the Curiosity rover’s location for Sol 1576.
The map shows the route driven by the robot through the 1576 Martian day, or sol, of the rover’s mission on Mars (January 12, 2017).
Numbering of the dots along the line indicate the sol number of each drive. North is up.
From Sol 1574 to Sol 1576, Curiosity has driven a straight line distance of about 96.45 feet (29.40 meters). Since touching down in Bradbury Landing in August 2012, Curiosity has driven 9.38 miles (15.10 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) onboard NASA’s Mars Reconnaissance Orbiter.

