Curiosity Front Hazcam Right B image taken on Sol 1638, March 16, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now in Sol 1639, continuing its dune campaign.
The robot has been at Stop 3, surveying “Southern Cove” for a couple of sols, prior to wheeling to another locale.

Curiosity Mars Hand Lens Imager (MAHLI) photo shows laser shots in sand from the rover’s Chemistry and Camera (ChemCam) instrument. MAHLI is located on the turret at the end of the rover’s robotic arm. Image acquired on Sol 1637, March 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
Drill diagnostics continuing
Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona reports the plan for Sol 1639 has the rover retracting its robotic arm and performing drill diagnostics before taking Mars Hand Lens Imager (MAHLI) photos of targets “Greenvale Cove” and “Holmes Hole.”
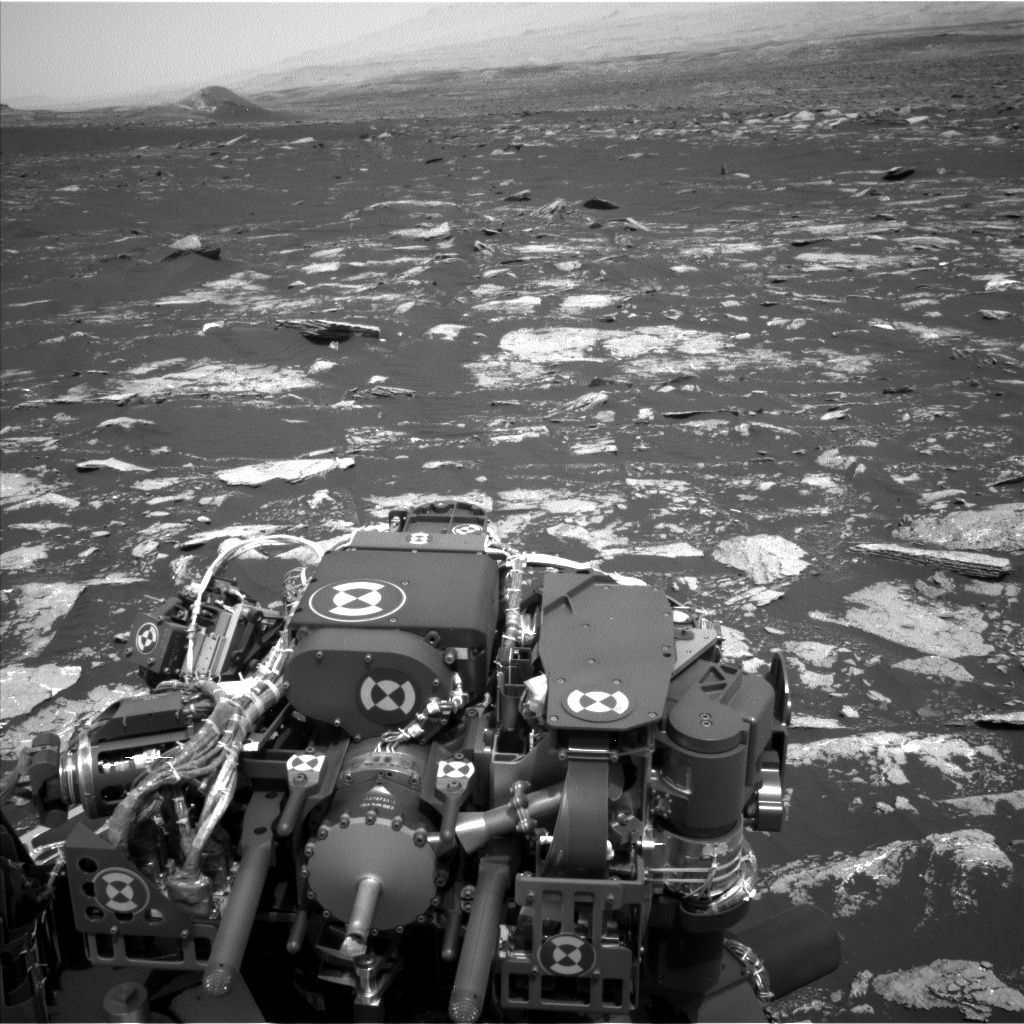
Curiosity Navcam Left B image taken on Sol 1639, March 17, 2017, showing the rover’s drilling equipment.
Credit: NASA/JPL-Caltech
“After that, we have a remote sensing science block with a Navcam movie to watch for clouds above the crater rim,” Anderson adds, followed by a Mastcam change detection observation of Holmes Hole and a ChemCam observation of the disturbed sand at Greenvale Cove.
Drill feed update
Inside Outer Space was provided a statement concerning the ongoing drill diagnostics issue and an update about the drill-feed mechanism.
Mars Science Laboratory Project Manager, Jim Erickson, said: “The project has done enough diagnostics to understand possibilities for why the brake does not release consistently. There is increased friction during one part of the motor-brake system rotation. This narrows the range of possible causes.”
“Now we are characterizing what it will take to make the drill feed reliable throughout a typical drilling activity. We expect to be able to solve this, but it will take some additional time,” Erickson added.

Curiosity Navcam Left B image taken on Sol 1639, March 17, 2017.
Credit: NASA/JPL-Caltech
Onward to stop 4
Curiosity’s Mastcam is slated to also document Greenvale Cove. After the remote sensing is done, the Mars machinery is set to drive toward Stop 4 — dubbed “Ogunquit Beach” — and collect post-drive images.
As always, planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

